一种集装箱空箱堆高机安全作业防护系统的制作方法-j9九游会真人
1.本实用新型涉及集装箱港口装卸运输设备的技术领域,尤其涉及一种集装箱空箱堆高机安全作业防护系统。
背景技术:
2.集装箱空箱堆高机(以下简称空叉)一直都是堆垛空箱主力,有速度快、操作灵活和省空间等特点,然而在省空间同时,箱与箱之间靠太近,堆垛不规范,容易引发集装箱连环撞击或者因为单箱滚落撞倒其他集装箱的事故(称为打保龄),更有甚者一个集装箱倾倒会引发其它的集装箱连锁反应,导致更多集装箱倾倒。严重危及司机生命安全和设备安全,还有下雨天和夜间司机看不到三层箱以上锁头是否对正箱孔;上下集装箱是否对齐。
技术实现要素:
3.为了解决上述背景技术中的问题,本实用新型提供了一种集装箱空箱堆高机安全作业防护系统,便于对集装箱之间相对位置的检测和观看,且解决了现有容易发生集装箱倾倒的问题。
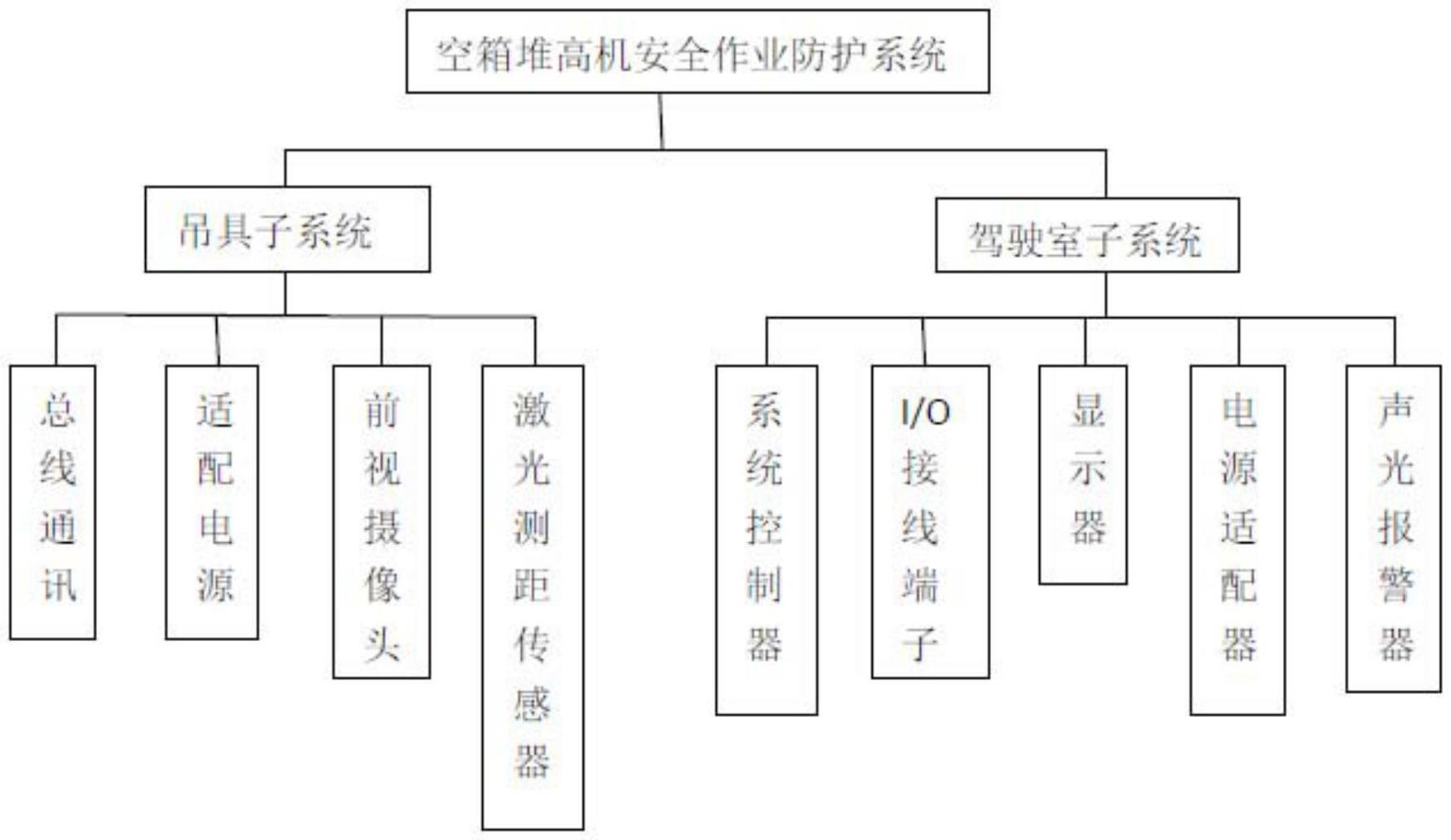
4.本实用新型解决其技术问题所采取的方案是:一种集装箱空箱堆高机安全作业防护系统,包括吊具子系统和驾驶室子系统、控制系统,其中吊具子系统包括总线通讯、适配电源、前视摄像头、激光测距传感器,其中驾驶室子系统包括系统控制器、电源适配器、显示器、声光报警器,其中总线通讯为原车can bus总线通讯,适配电源为原车适配电源,前视摄像头为无线红外摄像头,激光测距传感器安装空叉左右臂架头上方以便作业时对前方箱距进行扫描测距,前视摄像头安装空叉左右臂架头上方以便采集的作业图像,系统控制器与前视摄像头电性连接以便获取空叉的作业工况,系统控制器与激光测距传感器电性连接以便接收激光测距数据,电源适配器与原车适配电源、激光测距传感器、摄像头、显示器、声光报警器直接或间接电性连接以便从驾驶室获取适配电源后经转换向控制柜内设备、激光测距传感器、摄像机、显示器、声光报警器供电,显示器安装在驾驶室右前方以便显示前视摄像头采集的作业图像以及系统的工作状态,声光报警器安装在驾驶室内且电按箱左侧以便接收控制器发出的信号并发出声光,控制系统包括控制空叉门架的控制电路系统、控制空叉门架的控制液压系统。
5.进一步的,系统控制器选用为cr711s。
6.进一步的,适配电源为24v。
7.进一步的,前视摄像头为veise1080p无线红外摄像头ipcam,内置2.4ghz无线发射模块。
8.进一步的,显示器为数字无线车载显示器,为彩色液晶显示器。
9.进一步的,激光测距传感器选用ifm型号为01d105激光测距传感器。
10.进一步的,控制电路系统包括系统控制器、二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀,系统控制器与二位电磁阀、操作手柄、主阀、齿轮泵、锁止阀电性连接。
11.进一步的,控制液压系统包括储能器、操作手柄、过滤器、减压阀、二位电磁阀、主阀、齿轮泵、锁止阀、倾斜油缸、油箱,油箱与储能器、操作手柄、主阀以油路连接,过滤器、减压阀设置在油箱与操作手柄的油路上,过滤器、齿轮泵设置在油箱与主阀的油路上,操作手柄、二位电磁阀、主阀依次以油路连接,主阀与倾斜油缸油路连接,锁止阀设置在主阀向倾斜油缸输入油路上。
12.进一步的,系统控制器与电源适配器、原车适配电源、激光测距传感器、摄像头、显示器、声光报警器均通过i/o接线端子插接连接。
13.进一步的,还包括测距警报电路,测距警报电路包括继电器k1、继电器k2、继电器k3、继电器k4、左边激光测距传感器b1、右边激光测距传感器b2、蜂鸣器h1、二位三通电磁阀y1,其中左边激光测距传感器b1、右边激光测距传感器b2的正极与系统控制器的正极电性连接,左边激光测距传感器b1、右边激光测距传感器b2的负极与系统控制器的负极电性连接或接地,左边激光测距传感器b1的一个输出端与继电器k1电性连接后接地,左边激光测距传感器b1的一个输出端与继电器k2电性连接后接地,右边激光测距传感器b2的一个输出端与继电器k1电性连接后接地,右边激光测距传感器b2的一个输出端与继电器k2电性连接后接地,继电器k1、继电器k2、继电器k3、继电器k4并联后与蜂鸣器h1串联并与系统控制器的正极和负极电性连接,继电器k2、继电器k4并联后与二位三通电磁阀y1串联并与系统控制器的正极和负极电性连接。
14.综上所述,本实用新型的有益效果为:本实用新型通过设置前视摄像头、激光测距传感器,可以对集装箱之间相对位置的检测和观看,通过设置声光报警器以及控制电路系统、控制液压系统来使司机感知集装箱之间相对位置和控制门架前倾,从而防止事故的发生,保障码头运输工作秩序,提高码头运输工作效率。
15.上述说明仅是本实用新型的技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
16.图1为本实用新型的示意图;
17.图2为本实用新型的液压油路图;
18.图3为本实用新型左侧吊具安装板的尺寸图;
19.图4为本实用新型右侧吊具安装板的尺寸图;
20.图5为本实用新型激光测距传感器的工作电路图。
21.图中:1、储能器;2、操作手柄;3、过滤器;4、减压阀;5、二位电磁阀;6、主阀;7、齿轮泵;8、锁止阀;9、倾斜油缸;10、油箱;b1为左边激光测距传感器;b2为右边激光测距传感器;k1、k2为左边激光测距传感器控制继电器;k3、k4为右边激光测距传感器控制继电器;h1为蜂鸣器;y1为二位三通电磁阀。
具体实施方式
22.为了使本实用新型的内容能更容易被清楚的理解,下面根据具体实施例并结合附图,对本实用新型作进一步说明。
23.需要说明的是,本文所使用的术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。除非另有说明,“多个”的含义是两个或两个以上。
24.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
25.如图1至图2所示,一种集装箱空箱堆高机安全作业防护系统,包括吊具子系统和驾驶室子系统、控制系统,其中吊具子系统包括总线通讯、适配电源、前视摄像头、激光测距传感器,其中驾驶室子系统包括系统控制器、电源适配器、显示器、声光报警器,其中总线通讯为原车can bus总线通讯,适配电源为原车适配电源,前视摄像头为无线红外摄像头,激光测距传感器安装空叉左右臂架头上方以便作业时对前方箱距进行扫描测距,前视摄像头安装空叉左右臂架头上方以便采集的作业图像,系统控制器与前视摄像头电性连接以便获取空叉的作业工况,系统控制器与激光测距传感器电性连接以便接收激光测距数据,电源适配器与原车适配电源、激光测距传感器、摄像头、显示器、声光报警器直接或间接电性连接以便从驾驶室获取适配电源后经转换向控制柜内设备、激光测距传感器、摄像机、显示器、声光报警器供电,显示器安装在驾驶室右前方以便显示前视摄像头采集的作业图像以及系统的工作状态,声光报警器安装在驾驶室内且电按箱左侧以便接收控制器发出的信号并发出声光,控制系统包括控制空叉门架的控制电路系统、控制空叉门架的控制液压系统,系统控制器里设置有处理激光测距所得数据的程序并在危险时发送信号给声光报警器报警和命令控制系统来控制空叉门架。图3为本实用新型左侧吊具安装板的尺寸图;图4为本实用新型右侧吊具安装板的尺寸图;其中腰型孔为摄像头在安装板上的安装孔,圆孔为激光测距传感器在安装板上的安装孔。
26.进一步的,系统控制器选用为ifm(易福门)cr711s。
27.进一步的,适配电源为24v。
28.进一步的,前视摄像头为veise1080p无线红外摄像头ipcam,内置2.4ghz无线发射模块,防水型,6mm广角110
°
,摄像距离为30米,发射距离100米。
29.进一步的,显示器为数字无线车载显示器,为彩色液晶显示器。
30.进一步的,激光测距传感器选用ifm型号为01d105激光测距传感器。此传感器根据设定输出两种信号,可测量0.2到10米的距离。精度为
±
2.5mm。
31.进一步的,控制电路系统包括系统控制器、二位电磁阀(5)、操作手柄(2)、主阀(6)、齿轮泵(7)、锁止阀(8),系统控制器与二位电磁阀(5)、操作手柄(2)、主阀(6)、齿轮泵(7)、锁止阀(8)电性连接。
32.进一步的,控制液压系统包括储能器(1)、操作手柄(2)、过滤器(3)、减压阀(4)、二位电磁阀(5)、主阀(6)、齿轮泵(7)、锁止阀(8)、倾斜油缸(9)、油箱(10),其中油箱(10)与储能器(1)、操作手柄(2)、主阀(6)以油路连接,过滤器(3)、减压阀(4)设置在油箱(10)与操作手柄(2)的油路上,过滤器(3)、齿轮泵(7)设置在油箱(10)与主阀(6)的油路上,操作手柄
(2)、二位电磁阀(5)、主阀(6)依次以油路连接,主阀(6)与倾斜油缸(9)油路连接,锁止阀(8)设置在主阀(6)向倾斜油缸(9)输入油路上。
33.进一步的,系统控制器与电源适配器、原车适配电源、激光测距传感器、摄像头、显示器、声光报警器均通过i/o接线端子插接连接以便对前打保龄和前压箱角打保龄二种险情进行检测并通过i/o接线端子向声光报警器发送防护控制信号。
34.进一步的,还包括测距警报电路,测距警报电路包括继电器k1、继电器k2、继电器k3、继电器k4、左边激光测距传感器b1、右边激光测距传感器b2、蜂鸣器h1、二位三通电磁阀y1,其中左边激光测距传感器b1、右边激光测距传感器b2的正极与系统控制器的正极(dc4v)电性连接,左边激光测距传感器b1、右边激光测距传感器b2的负极与系统控制器的负极(dcov)电性连接或接地(dcov),左边激光测距传感器b1的一个输出端与继电器k1电性连接后接地(dcov),左边激光测距传感器b1的一个输出端与继电器k2电性连接后接地(dcov),右边激光测距传感器b2的一个输出端与继电器k1电性连接后接地(dcov),右边激光测距传感器b2的一个输出端与继电器k2电性连接后接地(dcov),继电器k1、继电器k2、继电器k3、继电器k4并联后与蜂鸣器h1串联并与系统控制器的正极(dc4v)和负极(dcov)电性连接,继电器k2、继电器k4并联后与二位三通电磁阀y1串联并与系统控制器的正极(dc4v)和负极(dcov)电性连接。负极(dcov)在系统控制器里的接地为等同连接,见图5。
35.集装箱的国际标准宽度不论是20尺和40尺都是2350mm,在空叉两个臂架头上方各安装一个无线摄像机和一个激光测距传感器,当空叉吊具锁头放进集装箱锁孔时,激光测距传感器到集装箱前端箱孔距离为2300mm。如果前箱压到后箱箱角,那么激光测距传感器测得矩离将小于2300mm,将传感器设定值为2300mm,这时激光测距传感器将发出电信号,外部继电器得电,光电轰鸣器报警,提醒司机有前箱压箱角,同时司机也可查看摄像头传输过来的图像信号,防止前打保龄的发生。
36.空箱堆高机(空叉)在提箱作业时,锁具放到箱孔内,激光传感器触发开始检测,检测到前面集装箱距离小于设定距离2300mm时,激光传感器第一组输出高电平,k1继电器(或者k3)得电,此时报警器发出报警信号,提醒操作司机前箱已经压到后箱了,也可以随时查看显示屏,防止了前箱压后箱打保龄的发生。
37.空叉在贝位堆箱时,如果司机对摆箱位置判定不准,继续前行,可能推挤前排集装箱,导致前排集装箱坠落,此时吊具加装的两个激光测距传感器将测量两箱之间的距离,规定两箱之间留有20mm的间隙,再加上前箱2300mm宽度,将激光传感器设定在2320mm,空叉在堆箱时如果距离小于2320mm时,激光传感器第二组输出高电平,k2继电器(或者k4)得电,蜂鸣器报警,此时空叉门架向前倾电磁阀得电,门架将不能向前倾,保证了两箱之间的距离为20mm,从而防止了向前推打保龄的发生。
38.当空箱堆高机堆箱时,激光传感器检测2320mm数据时,将发送电信号,使二位三通电磁阀得电,空叉门架将不能向前倾斜,同时c2 c4继电器得电,声光报警器将发出报警信号,提醒司机与前箱距离保持20mm的间隙。
39.齿轮泵(7)工作时,产生二路高压液压油,一路送至主阀(6),另一路高压油对储能器(1)充压,再流经过滤器(3)和减压阀(4)变成低压的控制油,当空叉司机推动操作手柄(2)时,低压油流经加装的二位电磁阀(5),推动主阀阀芯,使倾斜油缸(9)伸出,门架向前倾斜,当激光测距传感器检测到2320mm时,二位电磁阀得电,切断了控制油路,门架停止向前
倾斜,从而推不到前面的集装箱,这样就防止了打保龄的发生。也保证两箱有20mm的间隙。其中(10)为油箱,(8)锁止阀。
40.程序说明:
41.1,车体上安装有2组激光测距传感器,设置激光测距传感器的参数值,近距离感应2300mm,远距离感应2320mm;
42.2,程序中建立4个内部变量,分别为:一个激光测距传感器测得的距离为2300时;另一个激光测距传感器测得的距离为2300;一个激光测距传感器测得的距离为2320时;另一个激光测距传感器测得的距离为2320,用这4个变量保存激光测距传感器的实时数据;即:iaser1_sensor_distance_2300,iaser1_sensor_distance_2320,laser2_sensor_distance_2300,laser2_sensor_distance_2320;
43.3,当一个激光测距传感器测得的距离加上另一个激光测距传感器测得的距离为2300mm时,即iaser1_sensor_distance_2300加上laser2_sensor_distance_2300测量距离为2300mm时,内部buzzer置位为1,声光报警器发出声光报警信号;
44.4,当一个激光测距传感器测得的距离加上另一个激光测距传感器测得的距离为2320mm时,即iaser1_sensor_distance_2320加上laser2_sensor_distance_2320测量距离为2320mm时,内部y1变量置位为1,输出电磁阀置位,控制液压阀,产生动作。
45.本实用新型通过设置前视摄像头、两个激光测距传感器,可以对集装箱之间相对位置的检测和观看,通过设置声光报警器以及控制电路系统、控制液压系统来使司机感知集装箱之间相对位置和控制门架前倾,从而防止事故的发生,保障码头运输工作秩序,提高码头运输工作效率。
46.具体说来有以下有益效果:
47.1,本实用新型使用激光测距传感器能够准确地检测到集装箱之间的距离,可以防前推打保龄,为集装箱准确叠放提供数据,空叉在堆箱作业时,如果司机对摆箱位置判定不准,空叉门架继续向前行推,可能推挤前排箱,此时防护系统给出前推箱防护信号,对流机前倾进行制动,并向司机发出报警;
48.2,本实用新型使用有夜视功能的前视摄像头能够在夜晚能看清集装箱之间的间隙,为司机操作提供参考,在吊具起升、堆箱、提箱的整个过程中向司机提供吊具顶部俯视视野的堆箱区视频图像,辅助司机判定作业时箱顶情况,前箱是否压到后箱箱角,箱孔是否变形等;
49.3,本实用新型使用有声音和闪光的声光报警器能够双信号提醒司机注意操作,空叉左右臂架头上方安装两个激光测距传感器,作业时对前方箱距进行扫描测距,激光测距传感器将测量数据转换成电信号,再将电信号通过吊具子系统(ifm cr3200)和can bus通讯(原车有通讯线)将电信号发送至驾驶室里系统控制器(ifm cr711s plc),系统控制器(plc)触发声光报警器工作,提醒司机已经触碰到前面集装箱;同时显示器(veise)将显示故障代码;
50.4,本实用新型使用控制液压系统区控制门架的倾斜,为司机操作提供方便;
51.5,本实用新型可以防前压箱角打保龄,空叉在提箱作业时,如果前排箱摆放位置偏前,压住了后箱箱角或箱边,空叉起升时,作业箱可能将前排箱一起提升,此时防护系统给出前压箱角防护信号,并向司机发出报警。
52.以上所述的实施例仅为本实用新型的优选实施方式,不能以此来限定本实用新型的保护范围,本领域的技术人员在实用新型的基础上所做的任何非实质性的变化和修改,均属于本实用新型的保护范围。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!