一种具有检测机械臂夹持棍体功能的棉花糖机的制作方法-j9九游会真人
1.本实用新型涉及棉花糖机技术领域,具体是一种具有检测机械臂夹持棍体功能的棉花糖机。
背景技术:
2.棉花糖是一种深受大众喜爱的甜品,现今,可以通过棉花糖机来自动制作棉花糖,申请人在先申请的中国发明专利202111100742.8公开了一种棍体发放装置及棉花糖机,棉花糖机内置控制器、棍体发放装置、机械臂和炉头装置,工作时,控制器控制机械臂先运行至初始位置,然后控制棍体发放装置将棍体向下发放至机械臂处,然后控制机械臂取棍,然后控制机械臂带着棍体运动至炉头装置上方并旋转,然后控制炉头装置甩出加热融化的糖丝,从而能在棍体上缠绕糖丝制成棉花糖。但是,在实际应用中,可能会存在棍体发放装置未成功发放棍体至机械臂处、或者机械臂未夹紧棍体导致棍体未从棍体发放装置中取出、或者机械臂夹取棍体时棍体掉落等意外情况,导致机械臂并未成功夹取棍体,而此时控制器按照设定程序自动控制机械臂和炉头装置继续工作,就会导致炉头装置喷出的糖丝由于没有棍体可供缠绕而到处喷洒的情况,造成无法制作完成棉花糖、材料浪费以及糖丝到处喷洒而污染棉花糖机内部的问题。
技术实现要素:
3.为了克服现有技术中存在的缺陷,本实用新型的目的是提供一种具有检测机械臂夹持棍体功能的棉花糖机,能够在机械臂完成设定取棍动作之后检测机械臂是否夹持有棍体,而且结构设计巧妙,易于实际应用。
4.本实用新型目的通过下列技术方案来实现:
5.一种具有检测机械臂夹持棍体功能的棉花糖机,包括机柜和控制器,机柜内设有用于加热糖体并甩出糖丝的炉头装置、用于带动棍体移动并旋转以缠绕糖丝形成棉花糖的机械臂、以及用于发放棍体以供机械臂取棍的棍体发放装置,所述机柜内还设有用于检测棍体的传感器,所述传感器位于机械臂带动棍体运动所经过的范围内,以使机械臂上如果夹持有棍体则棍体会运动至传感器处并触发传感器,传感器连接控制器并能向控制器发送触发信号,从而能够通过传感器是否发出触发信号来检测机械臂是否有夹持棍体。
6.作为优选的技术方案,所述机柜内设有相互独立的制糖腔和棍体发放腔,棍体发放腔位于所述制糖腔之上,所述机械臂及炉头装置位于制糖腔内,所述棍体发放装置位于棍体发放腔内,制糖腔的顶壁上设有连通棍体发放腔的出棍孔,棍体发放装置能驱动棍体使其下端竖向穿过出棍孔至制糖腔内并插入至所述机械臂的夹持部,所述传感器为接触式传感器,所述传感器与出棍孔并列设置在制糖腔的顶壁上,所述控制器能够控制机械臂在完成取棍动作后先按照设定路径移动以使其夹持的棍体上端能够抵顶并触发传感器,如果传感器被触发,则继续控制机械臂带动棍体运动至所述炉头装置上方,然后控制炉头装置转动以甩出糖丝,如果传感器未被触发,则控制机械臂及炉头装置不执行上述动作。
7.作为优选的技术方案,所述传感器包括安装盒、以及安装在安装盒内的行程开关,安装盒的顶部固定连接所述制糖腔的顶壁,安装盒的底部设有一个供所述棍体的上端插入并触发行程开关的插孔。
8.作为优选的技术方案,所述机械臂包括至少三个依次铰接串联的摆臂以及安装在末端摆臂上以用于夹持棍体的夹持部,前端摆臂与所述机柜铰接并能通过第一驱动机构驱动转动,各个相邻摆臂之间分别通过电动关节铰接,夹持部与末端摆臂进行可转动连接并能通过第二驱动机构驱动夹持部绕其夹持的棍体轴心转动。
9.和现有技术相比,本专利提供的一种具有检测机械臂夹持棍体功能的棉花糖机,主要具有以下技术效果:在机柜内设置传感器,控制器控制机械臂完成取棍动作后先按照设定路径移动以检测机械臂上是否有夹持棍体,如果机械臂上有成功夹持棍体,则该棍体会触发传感器,如果机械臂上没有夹持棍体,则棍体不会触发传感器,从而能够检测机械臂上是否有棍体,为接下来是否控制机械臂朝向炉头装置运动、以及是否控制炉头装置转动以甩出糖丝提供判断依据,从而能有效避免在机械臂未成功夹取棍体的情况下,炉头装置依然按照设定程序转动并甩出糖丝造成的一些列问题。
10.以下将结合附图对本实用新型的构思、具体结构及产生的效果作进一步说明,以充分地理解本实用新型的目的、特征和效果。
附图说明
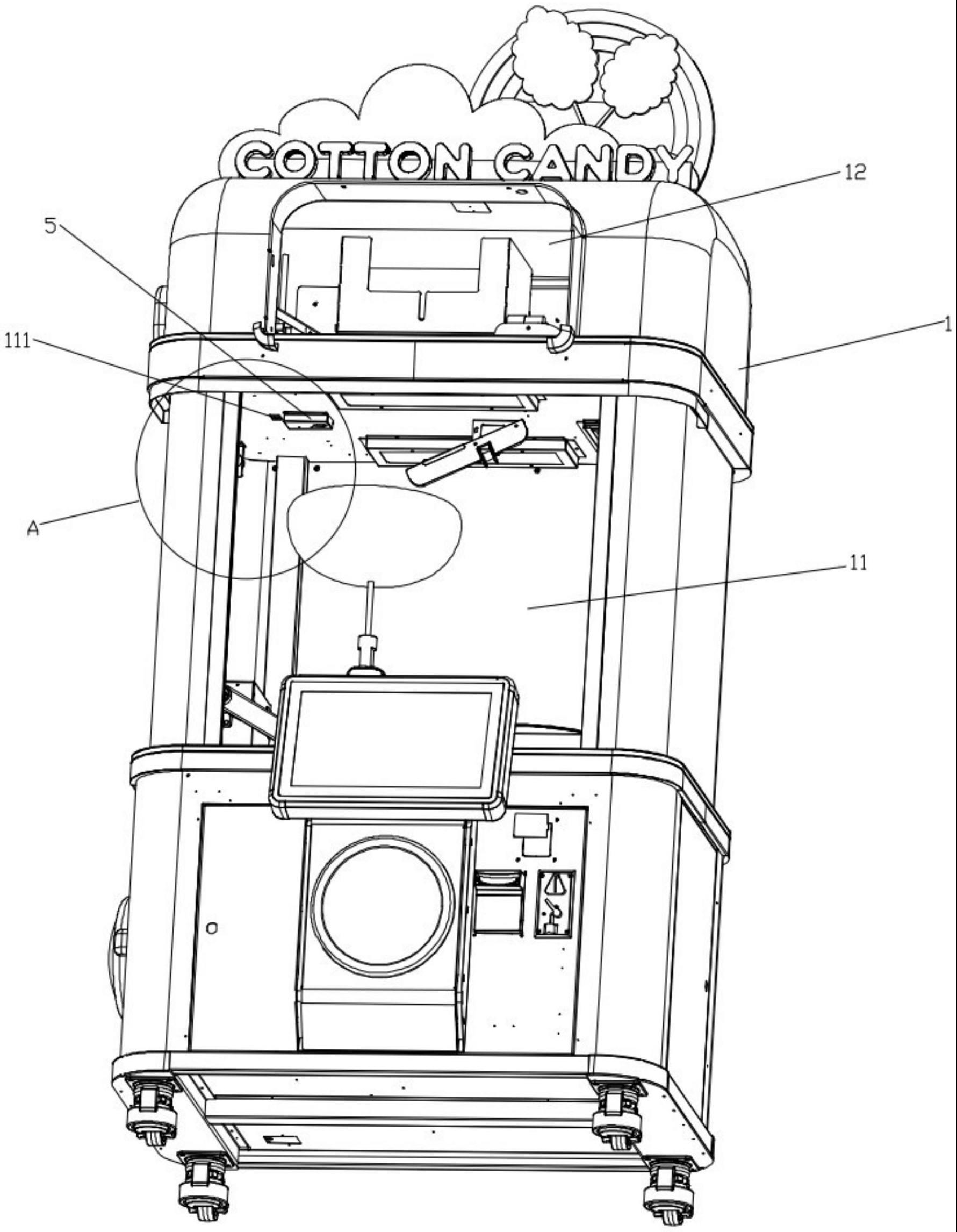
11.图1是实施例1中具有检测机械臂夹持棍体功能的棉花糖机的结构示意图;
12.图2是实施例中1具有检测机械臂夹持棍体功能的棉花糖机的在另一视角的结构示意图;
13.图3是图2中a部分的局部放大图。
14.其中:机柜1,制糖腔11,出棍孔111,棍体发放腔12,炉头装置2,机械臂3,前端摆臂31,中间摆臂32,末端摆臂33,夹持部34,棍体发放装置4,传感器5,安装盒51,插孔511,行程开关52,棍体100,棉花糖200。
具体实施方式
15.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处说描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。
16.实施例1:
17.如图1-3所示,本实施例提供了一种具有检测机械臂夹持棍体功能的棉花糖机,包括机柜1和控制器(附图中未示出),所述机柜1内设有相互独立的制糖腔11和棍体发放腔12,棍体发放腔12位于所述制糖腔11之上,制糖腔11内设有用于加热糖体并甩出糖丝的炉头装置2、用于带动棍体100移动并旋转以缠绕糖丝形成棉花糖200的机械臂3,棍体发放腔12内设有用于发放棍体100以供机械臂3取棍的棍体发放装置4,制糖腔11的顶壁上设有连通棍体发放腔12的出棍孔111,棍体发放装置4能驱动棍体100使其下端竖向穿过出棍孔111至制糖腔11内并插入至所述机械臂3的夹持部34;所述机械臂3包括三个依次铰接串联的前端摆臂31、中间摆臂32和末端摆臂33,以及安装在末端摆臂33上以用于夹持棍体100的夹持
部34,前端摆臂31与所述机柜1铰接并能通过第一驱动机构驱动转动,各个相邻摆臂之间分别通过电动关节铰接,夹持部34与末端摆臂33进行可转动连接并能通过第二驱动机构驱动夹持部34绕其夹持的棍体轴心转动;所述机柜1内还设有用于检测棍体100的传感器5,所述传感器5位于机械臂3带动的棍体100运动所经过的范围内,以使机械臂3上如果夹持有棍体100则棍体100会运动至传感器5处并触发传感器5,传感器5连接控制器并能向控制器发送触发信号,从而能够通过传感器5是否发出触发信号来检测机械臂3是否有夹持棍体100。
18.工作时,控制器在控制机械臂3完成取棍动作之后(即机械臂3将棍体100从棍体发放装置4中向下抽出,此时并不一定成功夹取棍体100,可能存在的意外情况如背景技术中所述),先控制机械臂3按照设定路径移动以检测机械臂3上是否有夹持棍体100,如果机械臂3上有成功夹持棍体100,则该棍体100会触发传感器5,如果机械臂3上没有夹持棍体100,则棍体100不会触发传感器5,从而能够检测机械臂3上是否有棍体100,为接下来是否控制机械臂3朝向炉头装置2运动、以及是否控制炉头装置2转动以甩出糖丝提供判断依据,如果传感器5被触发,则继续控制机械臂3带动棍体100运动至所述炉头装置2上方,然后控制炉头装置2转动以甩出糖丝,如果传感器5未被触发,则控制机械臂3及炉头装置2不执行上述动作,从而能有效避免在机械臂3未成功夹取棍体100的情况下,炉头装置2依然按照设定程序转动并甩出糖丝造成的一些列问题;而且,该传感器5并不是安装在机械臂3的夹持部34上,而是固定设置在机柜1内,因此不存在传感器5需要跟随机械臂3运动而导致的布线困难问题。
19.作为本实施例的一个优选方案,所述传感器5包括安装盒51、以及安装在安装盒51内的行程开关52,安装盒51的顶部固定连接所述制糖腔11的顶壁,安装盒51的底部设有一个供所述棍体100的上端插入并触发行程开关52的插孔511。由于机械臂3的夹持部34一般是夹取棍体100的下端,因此将传感器5设置在制糖腔11的顶壁,与出棍孔111并列设置,机械臂3在完成向下抽出棍体100的取棍动作后,只需平移一小段距离然后向上移动,即可以带动其夹取的棍体100使其上端碰触并触发该行程开关52,路径短且控制方便。在其他实施例中,传感器也可以采用非接触式传感器。
20.实施例2:
21.本实施例提供一种用于检测机械臂是否夹持棍体的检测方法,适用于实施例1中棉花糖机,该方法包括:在控制器控制棍体发放装置4完成发棍动作以及机械臂3完成取棍动作后,执行棍体检测程序,即控制机械臂3按照设定路径运动,如果机械臂3上有夹持棍体100,则棍体100会触发传感器5并向控制器发出触发信号,如果机械臂3上没有夹持棍体100则不向控制器发出触发信号,然后,控制器根据是否接收到触发信号,为接下来是否控制机械臂3朝向炉头装置2运动、以及是否控制炉头装置2转动以甩出糖丝提供判断依据。
22.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离实用新型构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!