一种多旋翼无人机起降操作平台的制作方法-j9九游会真人
1.本实用新型涉及无人机周边配套设备与技术领域,具体涉及一种多旋翼无人机起降操作平台。
背景技术:
2.现有用于户外操作收放多旋翼式无人机的起落平台,主要结构为在三脚架上搭设方型或圆形平面,这种平台无法实现起飞前和降落后对无人机进行位置定位和机身固定,同时在户外地形复杂的起降位置难以对平台面进行水平调节。
技术实现要素:
3.本实用新型要解决的技术问题:克服构造和功能简单的无人机起落平台难以实现无人机的自动定位固定以及平台面水平调节的不足,提供一种多旋翼无人机起降操作平台,其能够实现降落过程中对无人机进行快速的定位固定,以及平台面自动水平调节,同时其还扩展了无人机收纳和运送、反馈式自动定位固定、以及平台面扩展等功能。
4.本多旋翼无人机起降操作平台包括三角型的平台箱,设置在平台箱内的起降平台机构和主控机构,安装在平台箱三个侧棱上的三条支撑爪,安装在平台箱底部的三个走轮,其中,所述起降平台机构包括平台面,所述平台面上设有用于固定降落在平台面上的多旋翼式无人机的固定组件;所述平台面上设有导向轨道,所述固定组件包括滑装在所述导向轨道上的横定位杆和转动连接在横定位杆两端的斜限位杆;所述横定位杆两端底部安装有一套用于驱动横定位杆沿导向轨道平移的平移电机和用于驱动斜限位杆在横定位杆上转动的限位电机。
5.具体的,所述导向轨道外侧设有齿条部,所述平移电机的输出轴上安装有与所述齿条部相啮合的齿轮;所述平移电机的输出轴穿过所述横定位杆并于所述斜限位杆内侧端固定连接。
6.进一步的,所述起降平台机构还包括三根电动气缸,所述电动气缸下端固定在平台箱底面上,电动气缸顶端连接在平台面底部上。
7.具体的,所述支撑爪包括电伸缩杆、爪架和爪盘,所述电伸缩杆固定在平台箱三个侧棱上,所述爪架转动连接在所述电伸缩杆下端,所述爪盘转动连接在爪架上。
8.进一步的,所述平台箱上设有箱盖,所述箱盖通过合叶可翻转式连接在平台箱一侧,箱盖上设有支撑筋板。
9.进一步的,所述平台箱一侧面设有对开式箱门。
10.进一步的,所述主控机构包括plc可编程控制器,所述平台面上设有红外传感器和四向双轴水平仪,所述横定位杆和斜限位杆上均设有薄膜压力传感器。
11.具体的,所述红外传感器、四向双轴水平仪和薄膜压力传感器连接在plc可编程控制器的输入端,plc可编程控制器的输出端分别对应连接所述电动气缸、电伸缩杆和平移电机、限位电机。
12.本实用新型一种多旋翼无人机起降操作平台,克服了现有构造和功能简单的无人机起落平台难以实现无人机的自动定位固定以及平台面水平调节的不足,其能够实现降落过程中对无人机进行快速的定位固定,以及平台面自动水平调节,同时其还扩展了无人机收纳和运送、反馈式自动定位固定、以及平台面扩展等功能。
附图说明
13.下面结合附图对本实用新型一种多旋翼无人机起降操作平台作进一步说明:
14.图1是本多旋翼无人机起降操作平台合盖收纳状态的平面结构示意图;
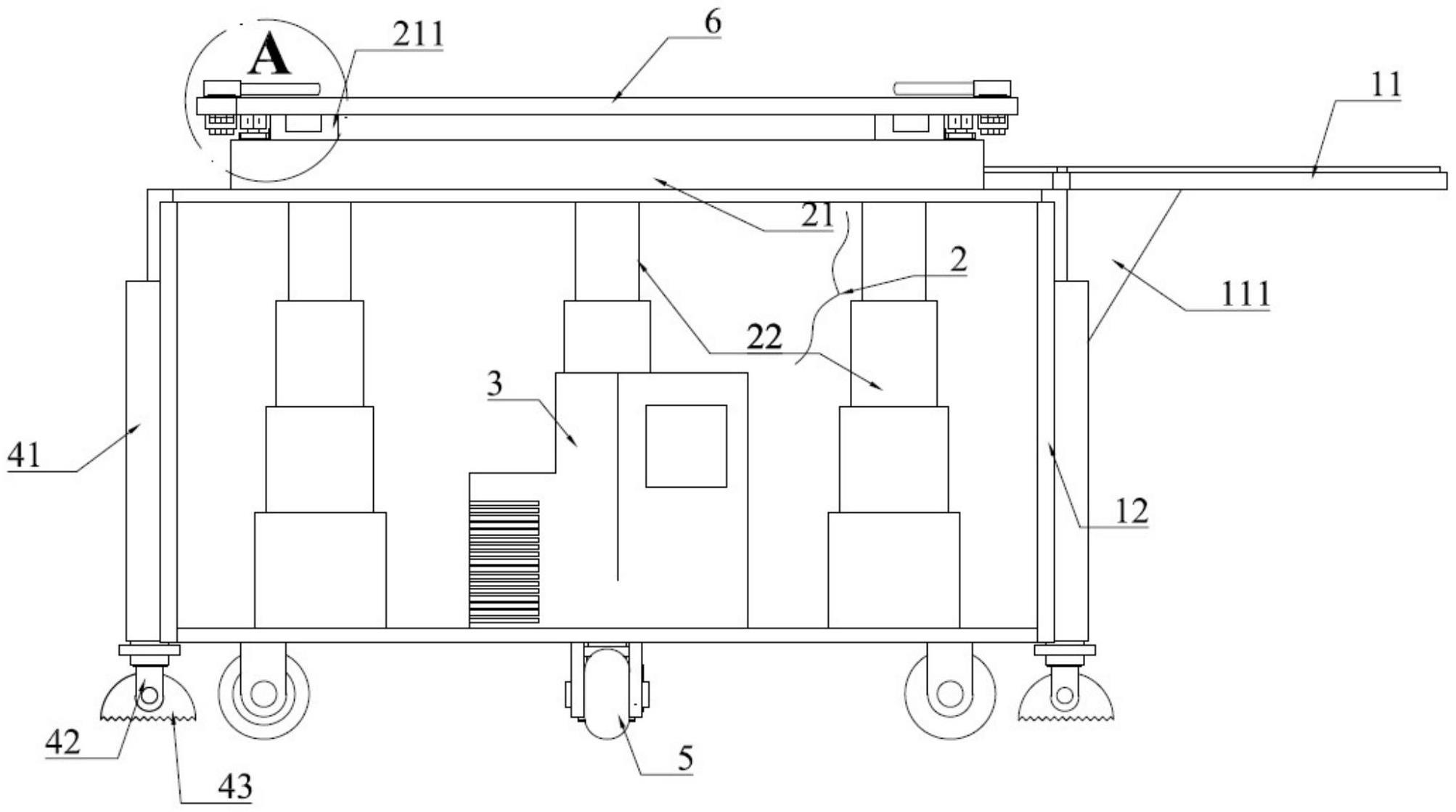
15.图2是本多旋翼无人机起降操作平台开盖展开状态的平面结构示意图;
16.图3是图2的俯视图;
17.图4是图2中a部位的局部放大图;
18.图5是本多旋翼无人机起降操作所述主控机构的输入输出逻辑连接关系图。
19.图中:
20.1-平台箱;11-箱盖、12-箱门;111-支撑筋板;
21.2-起降平台机构;21-平台面、22-电动气缸;211-导向轨道、212-齿条部;
22.3-主控机构;31-plc可编程控制器、32-红外传感器、33-四向双轴水平仪、34-薄膜压力传感器;
23.4-支撑爪;41-电伸缩杆、42-爪架、43-爪盘;
24.5-走轮;
25.6-固定组件;61-横定位杆、62-斜限位杆、63-平移电机、64-限位电机;631-齿轮。
具体实施方式
26.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
27.在本实用新型的描述中,需要理解的是,术语“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置关系均为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.以下用具体实施例对本实用新型技术方案做进一步描述,但本实用新型的保护范围不限制于下列实施例。
29.实施方式1:如图1至4所示,本多旋翼无人机起降操作平台包括三角型的平台箱1,设置在平台箱1内的起降平台机构2和主控机构3,安装在平台箱1三个侧棱上的三条支撑爪4,安装在平台箱1底部的三个走轮5,其中,所述起降平台机构2包括平台面21,所述平台面21上设有用于固定降落在平台面21上的多旋翼式无人机的固定组件6;所述平台面21上设有导向轨道211,所述固定组件6包括滑装在所述导向轨道211上的横定位杆61和转动连接在横定位杆61两端的斜限位杆62;所述横定位杆61两端底部安装有一套用于驱动横定位杆
61沿导向轨道211平移的平移电机63和用于驱动斜限位杆62在横定位杆61上转动的限位电机64。
30.实施方式2:为实现电机对定位杆、限位杆的驱动传动,本多旋翼无人机起降操作平台所述导向轨道211外侧设有齿条部212,所述平移电机63的输出轴上安装有与所述齿条部212相啮合的齿轮631;所述平移电机63的输出轴穿过所述横定位杆61并于所述斜限位杆62内侧端固定连接。其余结构和部件如实施方式1所述,不再重复描述。
31.实施方式3:为实现平台面的升起和降落操作,本多旋翼无人机起降操作平台所述起降平台机构2还包括三根电动气缸22,所述电动气缸22下端固定在平台箱1底面上,电动气缸22顶端连接在平台面21底部上。其余结构和部件如实施方式1所述,不再重复描述。
32.实施方式4:为实现平台面水平调节与保持支撑,本多旋翼无人机起降操作平台所述支撑爪4包括电伸缩杆41、爪架42和爪盘43,所述电伸缩杆41固定在平台箱1三个侧棱上,所述爪架42转动连接在所述电伸缩杆41下端,所述爪盘43转动连接在爪架42上。其余结构和部件如实施方式1所述,不再重复描述。
33.实施方式5:为实现平台面可利用区域的扩展,本多旋翼无人机起降操作平台所述平台箱1上设有箱盖11,所述箱盖11通过合叶可翻转式连接在平台箱1一侧,箱盖11上设有支撑筋板111。为便于在不升起平台面的条件下取放无人机,所述平台箱1一侧面设有对开式箱门12。其余结构和部件如实施方式1所述,不再重复描述。
34.实施方式6:如图5所示,为实现感应反馈式的自动平台升降、自动平台面的水平调节、定位限位杆对无人机机身的自动定位固定,本多旋翼无人机起降操作平台所述主控机构3包括plc可编程控制器31,所述平台面21上设有红外传感器32和四向双轴水平仪33,所述横定位杆61和斜限位杆62上均设有薄膜压力传感器34。所述红外传感器32、四向双轴水平仪33和薄膜压力传感器34连接在plc可编程控制器31的输入端,plc可编程控制器31的输出端分别对应连接所述电动气缸22、电伸缩杆41和平移电机63、限位电机64。其余结构和部件如实施方式1所述,不再重复描述。
35.使用时:将无人机防止在平台箱内平台面上,通过走轮运送至起飞地点,利用plc控制三个电伸缩杆将平台箱撑起并调节水平度,至平台面上四向双轴水平仪反馈水平,开盖后利用plc控制平台面升起,操作无人机起飞;无人机悬停至平台面所在区域后,红外传感器向plc发送信号,plc控制三个电动气缸将平台面顶起,三个电伸缩杆将平台箱撑起并调节水平度,至平台面上四向双轴水平仪反馈水平,平移电机转动,齿轮在齿条部行走带动横定位杆平移,将无人机推至固定位置,限位电机转动,两个斜限位杆内收,配合横定位杆将无人机机身围拢至平台降落点,电动气缸回收带动平台面及无人机收入平台箱,三个电伸缩杆上行收回,合盖后完成无人机降落和收纳。
36.本多旋翼无人机起降操作平台,克服了现有构造和功能简单的无人机起落平台难以实现无人机的自动定位固定以及平台面水平调节的不足,其能够实现降落过程中对无人机进行快速的定位固定,以及平台面自动水平调节,同时其还扩展了无人机收纳和运送、反馈式自动定位固定、以及平台面扩展等功能。
37.以上描述显示了本实用新型的主要特征、基本原理,以及本实用新型的优点。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施方式或者实施例的细节,且在不背离本实用新型的精神或者基本特征的情况下,能够以其他的具体形式实现本实用新
型。因此应将上述实施方式或者实施例看作示范性的,且非限制性的。本实用新型的范围由所附权利要求而非上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
38.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!