一种复杂环境下火灾预警巡检机器人的制作方法-j9九游会真人
1.本实用新型涉及火灾警报技术领域,具体为一种复杂环境下火灾预警巡检机器人。
背景技术:
2.火灾警报是指在火灾自动报警系统中,用以发出区别于环境声、光的火灾警报信号的装置称为火灾警报装置,火灾警报器是一种最基本的火灾警报装置,通常与火灾报警控制器组合在一起,它以声、光音响方式向报警区域发出火灾警报信号,以警示人们采取安全疏散、灭火救灾措施。
3.在变电站,城市综合管廊等,需要火灾检测,但是工作人员相较少的地方,其往往使用火灾预警装置,现在的火灾预警装置,其使用时不能起到灭火的效果,如中国专利cn216218414u提出了一种变电站火灾预警巡检装置,属于消防设备技术领域,包括箱体,所述箱体顶端的中间位置安装有安装板,且安装板设置有两组,并且安装板的内部开设有安装槽,所述安装槽的内部滑动安装有滑板,且滑板的一侧固定连接有第一过滤网,所述箱体的内部均匀安装有隔板。本实用新型通过设置有侧板、第一限位孔、支撑脚、连接弹簧、伸缩柱、限位杆以及第二限位孔,便于通过伸缩柱和连接弹簧的拉伸可在支撑脚与地面接触,完全吸附在地面上,实现了对装置摆放时的固定,并且可通过在限位杆、第一限位孔和第二限位孔的使用配合下啊,完成对伸缩柱位置的限位,提高了装置运行过程中的稳定性。
4.但是上述技术,在发生火灾时,只是报警,不能及时的扑灭火源,将火灾扼杀在萌发时,导致装置的实用性差,故而提出一种复杂环境下火灾预警巡检机器人。
技术实现要素:
5.针对现有技术的不足,本实用新型提供了一种复杂环境下火灾预警巡检机器人,解决了当在发生火灾时,只是报警,不能及时的扑灭火源,将火灾扼杀在萌发时,导致装置的实用性差的问题。
6.本实用新型提供如下技术方案:一种复杂环境下火灾预警巡检机器人,包括机器人壳,所述机器人壳的内部设有安装空腔,所述安装空腔的内壁上固定安装有灭火剂储存箱,所述灭火剂储存箱的两侧面均安装有喷水机构;
7.所述喷水机构包括丝杆,所述丝杆转动安装在安装空腔的内壁之间,所述安装空腔的内壁上固定安装有驱动电机,所述驱动电机的输出端与丝杆之间相连,所述丝杆的外表面螺纹连接有丝杆套筒,所述丝杆套筒的外表面固定安装有延伸板,所述延伸板的外表面开设有豁口,所述豁口的内壁上固定安装安装有工作电机,所述工作电机的输出端固定安装有安装臂,所述安装臂的内部侧壁之间固定安装有马达,所述马达的输出端固定安装有不完全齿轮,所述安装臂的内壁上固定安装有滑轨,所述滑轨的内部滑动连接有滑块,所述滑块的外表面固定安装有齿条框,所述齿条框与不完全齿轮之间相啮合,所述安装臂的内壁上转动连接有齿轮,所述齿条框的外表面固定安装有齿板,所述齿板的与齿轮相啮合,
所述齿轮的外表面固定安装有喷头,所述灭火剂储存箱的外表面固定安装有灭火剂用泵,所述灭火剂用泵和喷头之间安装有连接管。
8.优选的,所述机器人壳的外表面安装有火焰感应器、温度感应器和烟雾感应器。
9.优选的,所述喷水机构还包括滑杆,所述滑杆的外表面套设有滑套,所述滑套与丝杆套筒之间固定连接。
10.优选的,所述机器人壳的下表面设有一组万向轮。
11.优选的,所述灭火剂储存箱的外表面设有观察窗,所述观察窗的外表面设有刻度线。
12.优选的,所述机器人壳的外表面设有蜂鸣器和通讯网关,所述通讯网关无线接入云端。
13.优选的,所述火焰感应器包括提取疑似火焰区域模块和对疑似火焰区域提取纹理信息模块。
14.与现有技术相比,本实用新型提供了一种复杂环境下火灾预警巡检机器人,具备以下有益效果:
15.(1)该复杂环境下火灾预警巡检机器人,在机器人巡检过程中,遭发现火情需要灭火时,通过设置的火焰感应器,及时的判断火源位置,然后根据火源位置信息,启动驱动电机,驱动电机带动丝杆转动,使丝杆套筒能够稳定的沿着滑杆的方向上下移动,丝杆套筒带动喷头上下移动,可调节喷头的工作位置,通过设置的工作电机,工作电机带动安装壁转动,可调节喷头的工作方向,从而可根据工作需求,有效的调节喷头的工作方向和高度,使喷头的工作方向和高度,对准火源处,扑灭火源,将火灾扼杀在萌芽状态,减小人们的财产损失。
16.(2)该复杂环境下火灾预警巡检机器人,在使用时,通过设置的马达,马达带动不完全齿轮转动,进而带动齿条框沿着滑轨的方向,往复移动,齿条框带动齿板往复移动,齿板带动齿轮往复转动,齿轮带动喷头往复摆动,从而扩大了喷头的工作范围,提高灭火的工作效率。
17.(3)该复杂环境下火灾预警巡检机器人,可灵活的在各个场所移动,扩大了装置的工作范围,通过设置的火焰感应器和烟雾感应器,可及时的快速的检测装置周边环境,是否发生火灾,在发生火灾时,可调节喷头的工作高度和方向,快速的,及时的消灭火苗,并通过蜂鸣器发出警报,提醒附近的用户,同时,通过通讯网关发出火警信息,使不在现场的工作人员,能够快速知道火警的信息,及时做出响应,最大程度的减少火灾的影响。
附图说明
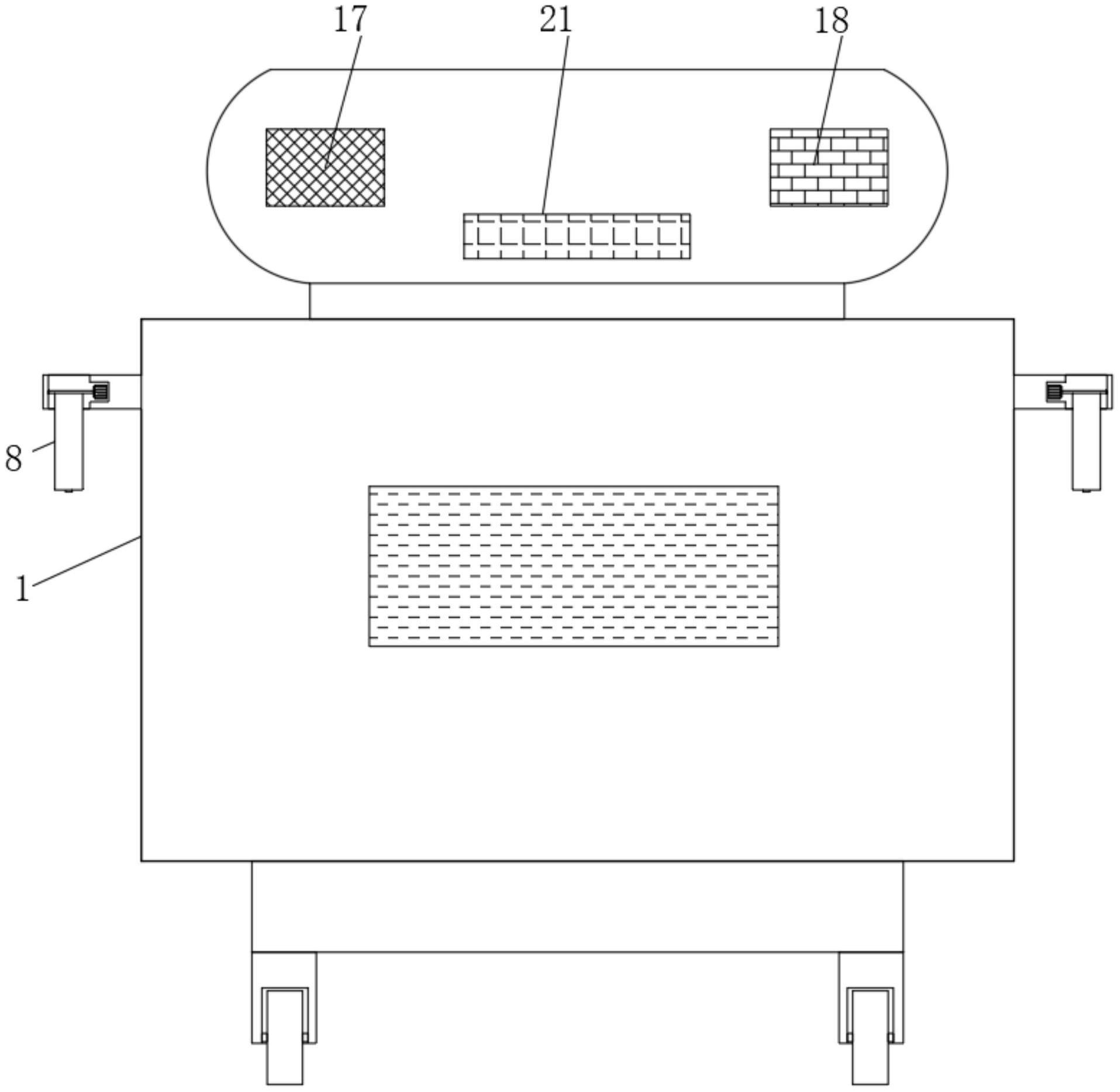
18.图1为本实用新型的结构示意图;
19.图2为本实用新型的剖视示意图;
20.图3为本实用新型的图2中a的结构放大图;
21.图4为本实用新型的lbp算法的计算方式示意图。
22.图中:1、机器人壳;2、安装空腔;3、灭火剂储存箱;4、丝杆;5、丝杆套筒;6、延伸板;7、工作电机;8、安装臂;9、马达;10、不完全齿轮;11、滑轨;12、齿条框;13、齿板;14、驱动电机;15、喷头;16、灭火剂用泵;17、火焰感应器;18、烟雾感应器;19、滑杆;20、齿轮;21、蜂鸣
器。
具体实施方式
23.请参阅图1-4,一种复杂环境下火灾预警巡检机器人,包括机器人壳1,机器人壳1的内部设有安装空腔2,安装空腔2的内壁上固定安装有灭火剂储存箱3,灭火剂储存箱3的两侧面均安装有喷水机构;
24.喷水机构包括丝杆4,丝杆4转动安装在安装空腔2的内壁之间,安装空腔2的内壁上固定安装有驱动电机14,驱动电机14的输出端与丝杆4之间相连,丝杆4的外表面螺纹连接有丝杆套筒5,丝杆套筒5的外表面固定安装有延伸板6,延伸板6的外表面开设有豁口,豁口的内壁上固定安装安装有工作电机7,工作电机7的输出端固定安装有安装臂8,安装臂8的内部侧壁之间固定安装有马达9,马达9的输出端固定安装有不完全齿轮10,安装臂8的内壁上固定安装有滑轨11,滑轨11的内部滑动连接有滑块,滑块的外表面固定安装有齿条框12,齿条框12与不完全齿轮10之间相啮合,安装臂8的内壁上转动连接有齿轮20,齿条框12的外表面固定安装有齿板13,齿板13的与齿轮20相啮合,齿轮20的外表面固定安装有喷头15,灭火剂储存箱3的外表面固定安装有灭火剂用泵16,灭火剂用泵16和喷头15之间安装有连接管。
25.使用时,灭火剂用泵16将灭火剂储存箱3内的水或其他灭火用液体,通过喷头15喷出,起到快速灭火的效果。
26.进一步的,机器人壳1的外表面安装有火焰感应器17、温度感应器和烟雾感应器18。
27.起到感应机器人周边环境的效果,方便机器人及时的判断周遭的环境。
28.进一步的,喷水机构还包括滑杆19,滑杆19的外表面套设有滑套,滑套与丝杆套筒5之间固定连接,起到导向的效果,保证丝杆套筒5能够稳定的沿着滑杆19的方向上下移动。
29.进一步的,机器人壳1的下表面设有一组万向轮,起到方便移动的效果,方便用户使用。
30.进一步的,灭火剂储存箱3的外表面设有观察窗,观察窗的外表面设有刻度线,起到方便工作人员观察的效果,方便用户观察使用。
31.进一步的,机器人壳1的外表面设有蜂鸣器21和通讯网关,通讯网关无线接入云端,在发生火灾时,可通过蜂鸣器21发出警报,提醒附近的用户,同时,通过通讯网关发出火警信息,使不在现场的工作人员,能够快速知道火警的信息。
32.进一步的,火焰感应器包括提取疑似火焰区域模块和对疑似火焰区域提取纹理信息模块。
33.1.提取疑似火焰区域模块,可以分别从rgb颜色和ycbcr颜色空间分割提取疑似火焰区域,排除不具有红色高亮等火焰特征的非火焰区域。
34.rgb颜色模型利用颜色特性描述火灾图像。彩色像素有三个不同的组成部分:红色,绿色和蓝色。rgb彩色像素可以提取到这三个单独的部件r、g和b用于颜色识别。火焰的颜色特征为r的浓度大于g大于b于是可以利用这一特点,进行疑似火焰区域的提取分割。
35.rgb颜色空间规则为:
[0036][0037]
基于rgb颜色空间的火焰分割提取,不能将像素值转化为亮度和色度,较为依赖光照,如果光照发生变化,区分火焰像素效果较差;针对此缺陷需要将rgb颜色空间转换到ycbcr颜色空间。在ycbcr颜色空间提取火焰区域时,可以充分利用火焰亮度和色度信息,所以考虑在该颜色空间提取火焰,转换公式如下所示
[0038][0039]
将图像转化到ycbcr颜色空间后,利用规则对图像进行处理,提取疑似火焰的区域,规则如下:
[0040][0041]
结合rgb与ycbcr颜色空间规则,融合提取疑似火焰区域规则如下:
[0042][0043]
2.对疑似火焰区域提取纹理信息模块,可以顺利分割火焰区域后,再使用lbp、lpq、glcm的算法分别提取疑似火焰区域纹理信息,用于区分具有红色高亮等特征的非火焰区域。
[0044]
lbp算法的计算方式如图4所示,图中给出3
×
3的像素块,共有9个像素,各自标有该点灰度值;按照规则处理后。以顺时针方向组合8个邻域点的值,得出二进制数,转化为十进制,便可以得到此区域的lbp特征,最终以直方图方式得出图像的lbp特征。因为当窗口9个像素灰度值同时出现亮度的非线性变换或者线性变换时,中心像素的灰度值与邻域内像素值大小关系不变,所以lbp提取纹理具有光照不变性,对于不同亮度下的图像,鲁棒性较好。
[0045]
lpq算法利用图像的频域相位信息提取纹理特征。lpq算法可以提取在中心对称模糊下具有模糊不变性的纹理特征,该特征通过短程傅里叶变换(stft)计算得到图像上像素点的局部相位信息,对于图像f(x,y),采用离散的短时傅里叶变换,其计算方式如下所示:
[0046][0047]
glcm
[0048]
灰度共生矩阵glcm,用于提取图像的纹理特征。它能够反映图像的灰度在相邻的方向、相邻的间隔、变化的幅度等方面的综合信息,能够反映具有相同灰度级的像素之间的位置分布特征,是计算纹理特征的基础。设图像中某点(x,y)的灰度值为i,另外一点的坐标为(x a,y b),灰度值为j。这两点形成的夹角为θ,距离为d的概率记为p(i,j,d,θ)。其中,θ一般取值0
°
,45
°
,90
°
,135
°
。glcm矩阵元素相对于主对角线的分布情况,可以反映出图像纹理的粗细程度。对于含有丰富粗纹理的区域,其glcm中非零元素比较多,并且在主对角线附近分布密集。因为在富含丰富粗纹理的区域,像素灰度分布相对平滑,方差较小。而对于含有较多细纹理的区域,其glcm中的非零元素值或值较大的元素值则分散分布。
[0049]
glcm本身并不是纹理特征,而是在其基础上进行纹理特征的提取,因此被称作二次统计量。在glcm中,选用4种最常用的概念来描述纹理特征,简化计算,提高分类精度,它们是:
[0050]
1)能量:glcm元素值的平方和,它主要反映了图像纹理的粗细程度和灰度的分布均匀程度。
[0051]
2)对比度:glcm值的分布情况,主要反映图像清晰度和纹理情况。
[0052]
3)熵:描述图像信息量,它反映了图像纹理复杂度。
[0053]
4)逆差距:表示图像纹理的规则程度,能够反映图像局部纹理变化的大小。逆差距越大则说明不同区域间的图像纹理变化反而越小,局部纹理相对均匀,反之也是一样的。
[0054]
将三种方法得到的这些纹理特征进行融合,形成新的融合特征,从而提高火焰的辨识率。
[0055]
综上所述,该复杂环境下火灾预警巡检机器人,在遭遇火情需要灭火时,通过设置的驱动电机14,驱动电机14带动丝杆4转动,使丝杆套筒5能够稳定的沿着滑杆19的方向上下移动,丝杆套筒5带动喷头15上下移动,可调节喷头15的工作位置,通过设置的工作电机7,工作电机7带动安装壁9转动,可调节喷头15的工作方向,从而可根据工作需求,有效的调节喷头15的工作方向和高度。
[0056]
该复杂环境下火灾预警巡检机器人,在使用时,通过设置的马达9,马达9带动不完全齿轮10转动,进而带动齿条框12沿着滑轨11的方向,往复移动,齿条框12带动齿板13往复移动,齿板13带动齿轮20往复转动,齿轮20带动喷头15往复摆动,从而扩大了喷头15的工作范围,提高灭火的工作效率。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!