一种动态表演螳螂机构的制作方法-j9九游会真人
1.本技术涉及仿生动态表演的技术领域,尤其是涉及一种动态表演螳螂机构。
背景技术:
2.螳螂是一种益虫,是日常生活中常见的昆虫,为大众所熟知。它凭借醒目的外表,独特的体型和习性,在多个领域占据着重要地位,在中国传统文化中,“螳螂捕蝉,黄雀在后”的故事家喻户晓,与螳螂相关的文化典故更是数不胜数。
3.仿生动态表演机构是游乐行业一种常见的设备,如动态恐龙、仿生鸟、仿生鱼等。然而截至目前,市面上还未有动态表演螳螂的机构、产品,且该领域尚无方案。因此,待设计一种动态螳螂,以实现仿真螳螂的自动表演,增强和丰富舞台表演效果,同时拉近观众对螳螂的认知距离,凸显出现代化高科技感。
技术实现要素:
4.本技术所要解决的技术问题是设计一种动态螳螂,以实现仿真螳螂的自动表演,增强和丰富舞台表演效果,同时拉近观众对螳螂的认知距离,凸显出现代化高科技感。
5.为了解决上述问题,本技术提供了一种动态表演螳螂机构,包括躯干骨架、翅膀扇动机构、嘴巴张合机构、触角摆动机构,所述翅膀扇动机构、所述嘴巴张合机构及所述触角摆动机构分别安装于所述躯干骨架上;所述触角摆动机构包括螳螂触角、第一安装组件、第一驱动组件及拉绳,所述第一驱动组件设于所述第一安装组件上,所述拉绳一端与所述螳螂触角相连,所述拉绳另一端转动连接于所述第一驱动组件,所述第一驱动组件驱动所述拉绳转动,以使所述拉绳带动所述螳螂触角摆动;所述翅膀扇动机构包括螳螂翅膀、安装座、第二驱动组件、移动副及第一联动组件,所述第二驱动组件、所述移动副及所述第一联动组件分别设于所述安装座,所述螳螂翅膀安装于所述第一联动组件上,所述第二驱动组件驱动所述移动副做直线运动,所述移动副带动所述第一联动组件及所述螳螂翅膀摆动;所述嘴巴张合机构包括下颚、第二安装组件、第三驱动组件及第二联动组件,所述第三驱动组件及所述第二联动组件分别设于所述第二安装组件上,所述下颚固定于所述第二联动组件,所述第三驱动组件驱动所述第二联动组件转动,以使所述第二联动组件带动所述下颚摆动。
6.优选的,所述第一安装组件包括第一机座、支座、底板及滑轮支架,所述第一机座、所述支座及所述滑轮支架均固定于所述底板的同一侧,所述底板固定于所述躯干骨架上,所述第一机座与所述滑轮支架分别设于所述支座相邻的两侧。
7.优选的,所述第一驱动组件包括第一电机、联轴器、小齿轮、大齿轮、绳轮及滑轮,所述第一电机固定于所述第一机座,所述联轴器转动连接于所述第一机座及所述支座之间,所述小齿轮及所述大齿轮转动连接于所述支座且相互啮合,所述联轴器两端分别与所述第一电机出轴及所述小齿轮相固定,所述绳轮转动连接于所述支座外侧,且所述绳轮与所述大齿轮共轴连接,所述滑轮转动连接于所述滑轮支架,所述拉绳一端分别与所述绳轮
及所述滑轮转动连接。
8.优选的,所述第二驱动组件包括第二电机、第一摆臂及随动轴承,所述安装座固定于所述躯干骨架背部,所述第二电机固定于所述安装座,所述第一摆臂一端与所述第二电机出轴固定,所述第一摆臂的偏心端与所述随动轴承铰接,且所述随动轴承与所述移动副滑动连接,以使所述第一摆臂带动所述随动轴承沿所述移动副滑动。
9.优选的,所述移动副包括带槽滑块及导轨,所述导轨固定设于所述安装座内,所述随动轴承滑动连接于所述带槽滑块的滑槽内,进而所述随动轴承带动所述带槽滑块沿所述导轨做往复直线运动。
10.优选的,所述第一联动组件包括翅膀转轴、第一连杆、翅膀夹块及第一关节轴承,所述第一连杆两端分别与所述带槽滑块及所述翅膀夹块铰接,所述第一关节轴承固定于所述安装座上,所述翅膀转轴两端分别与所述第一关节轴承转动连接,且所述螳螂翅膀与所述翅膀夹块相固定。
11.优选的,所述第二安装组件包括第二机座及安装板,所述安装板固定于所述躯干骨架头部,所述第二机座与所述安装板相固定,所述第三驱动组件固定于所述第二机座,且所述第三驱动组件与所述安装板固定连接,所述第二联动组件与所述安装板固定连接。
12.优选的,所述第三驱动组件包括第三电机、第二连杆及第二摆臂,所述第三电机固定于所述第二机座,所述第三电机出轴与所述第二摆臂一端相固定,所述第二连杆两端分别与所述第二摆臂的偏心端及所述第二联动组件铰接。
13.优选的,所述第二联动组件包括第二关节轴承及连接板,所述第二关节轴承一端固定于所述安装板上,另一端与所述连接板铰接,所述连接板与所述下颚相固定,且所述连接板与所述第二连杆铰接。
14.优选的,所述第二摆臂的偏心端相邻开设有第一安装孔位及第二安装孔位,所述第一安装孔位与所述第二安装孔位的中心距不同,所述第二连杆可分别铰接于所述第一安装孔位或所述第二安装孔位内以调节运动幅度。
15.与现有技术相比,本技术包括以下至少一种有益技术效果:
16.当需要该动态表演螳螂的触角摆动时,先启动第一电机,动力经由联轴器、小齿轮、大齿轮传输至绳轮,根据第一电机转动方向的不同,拉绳卷绕在绳轮上或绕出,使其与螳螂触角连接的末端执行拉和松的动作。在本实施例中,螳螂触角主要采用弹性材料,依照拉绳的拉和松动作,螳螂触角可作出弯曲和恢复的动作,从而模拟螳螂触角摆动。
17.当需要该动态表演螳螂的翅膀扇动时,先启动第二电机,第二电机出轴驱动第一摆臂中心旋转,第一摆臂的偏心端带动随动轴承转动;同时,带槽滑块沿导轨的长度方向进行往复直线运动,使得带槽滑块带动第一连杆一端做直线运动,第一连杆另一端带动翅膀夹块转动,进而带动螳螂翅膀绕翅膀转轴中心线旋转,实现螳螂翅膀的扇动。
18.当需要该动态表演螳螂的嘴巴张合时,先启动第三电机,第三电机出轴驱动第二摆臂旋转,第二摆臂的偏心端带动第二连杆转动,使得第二连杆远离第二摆臂一端拉动连接板与下颚绕第二关节轴承的中心轴线摆动,从而模拟下颚的张合动作。
附图说明
19.为了更清楚地说明本技术实施例技术方案,下面将对实施例描述中所需要使用的
附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
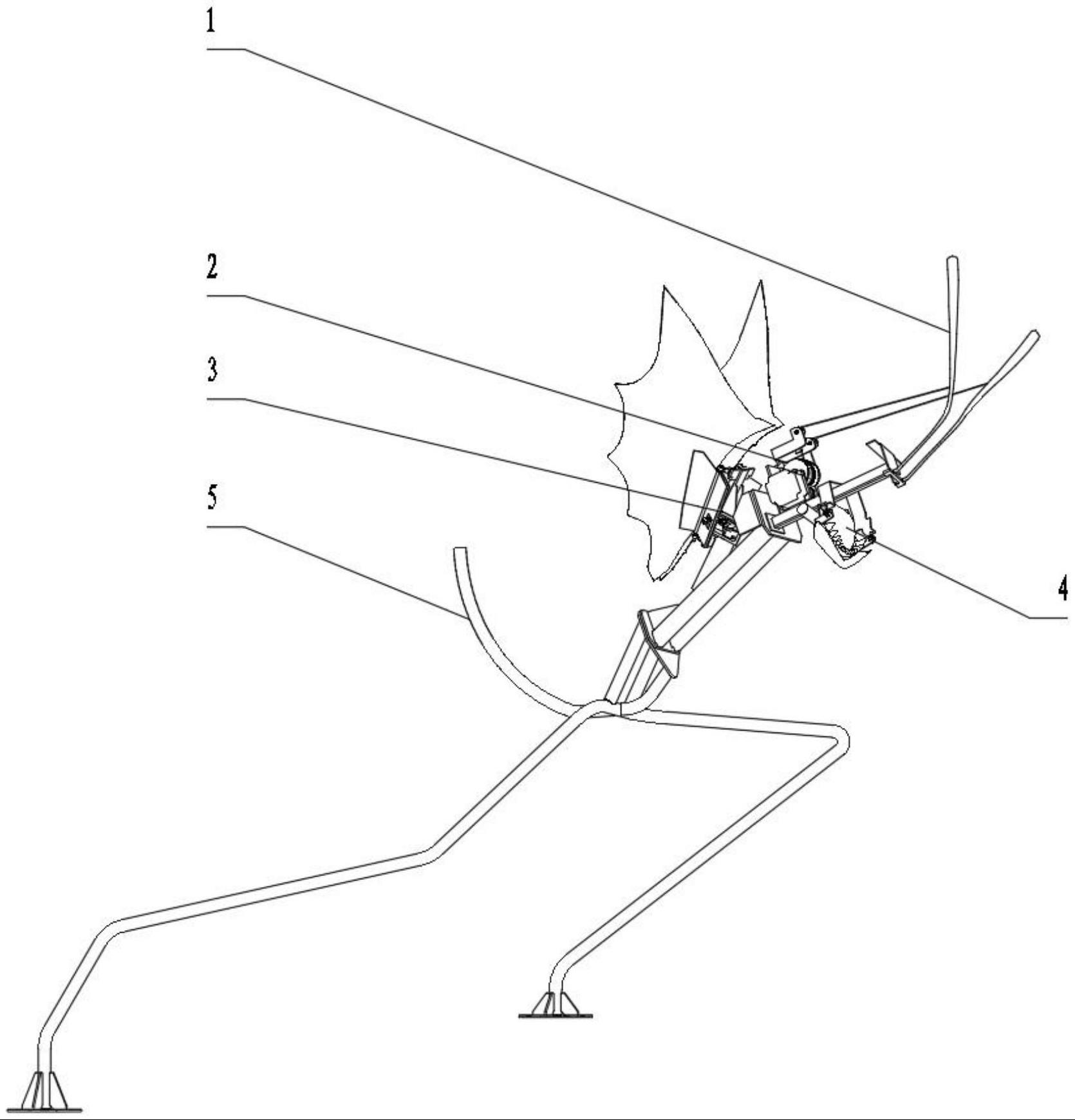
20.图1为本技术中动态表演螳螂机构处于运动状态的整体结构示意图。
21.图2为本技术中动态表演螳螂机构的躯干骨架与翅膀扇动机构、嘴巴张合机构及触角摆动机构的连接关系示意图。
22.图3为图2的局部放大图。
23.图4为本技术中触角摆动机构的结构示意图。
24.图5为本技术中翅膀扇动机构的结构示意图。
25.图6为本技术中嘴巴张合机构的结构示意图。
26.附图标记说明:1、螳螂触角;2、触角摆动机构;201、第一电机;202、第一机座;203、联轴器;204、小齿轮;205、支座;206、大齿轮;207、底板;208、绳轮;209、拉绳;210、滑轮支架;211、滑轮;3、翅膀扇动机构;301、第二电机;302、翅膀转轴;303、安装座;304、第一摆臂;305、随动轴承;306、带槽滑块;307、导轨;308、第一连杆;309、翅膀夹块;310、螳螂翅膀;311、第一关节轴承;4、嘴巴张合机构;401、下颚;402、连接板;403、第二关节轴承;404、第三电机;405、第二连杆;406、第二摆臂;406.1、第二安装孔位;407、第二机座;408、安装板;5、螳螂躯干骨架。
具体实施方式
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
29.还应当理解,在本技术说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本技术。如在本技术说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
30.还应当进一步理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
31.请参照图1和图2,本技术实施例提供了一种动态表演螳螂机构,该螳螂机构包括躯干骨架、翅膀扇动机构3、嘴巴张合机构4、触角摆动机构2。其中,翅膀扇动机构3、嘴巴张合机构4及触角摆动机构2分别安装于躯干骨架上,以相互配合实现螳螂嘴巴的张合、触角的摆动及翅膀的扇动,并且翅膀扇动机构3、嘴巴张合机构4及触角摆动机构2可独立动作,进而实现仿真螳螂的自动表演,增强和丰富舞台表演效果,同时拉近观众对螳螂的认知距离,凸显出现代化高科技感。
32.请参照图3和图4,触角摆动机构2包括螳螂触角1、第一安装组件、第一驱动组件及拉绳209。其中,第一驱动组件设于第一安装组件上,拉绳209一端与螳螂触角1相连接,拉绳209另一端固定并转动连接于第一驱动组件,通过第一驱动组件驱动拉绳209转动,使得拉
绳209带动螳螂触角1摆动。
33.第一安装组件包括第一机座202、支座205、底板207及滑轮支架210。其中,底板207固定安装于躯干骨架上,且底板207位于翅膀扇动机构3上方,第一机座202、支座205及滑轮支架210分别固定安装于底板207的同一侧,第一机座202与滑轮支架210分别位于支座205相邻的两侧。在本实施例中,支座205设置有两个,两个支座205沿长度方向对称设置,第一机座202位于支座205沿宽度方向的一侧,滑轮支架210位于支座205沿长度方向的一侧。
34.第一驱动组件包括第一电机201、联轴器203、小齿轮204、大齿轮206、绳轮208及滑轮211。其中,第一电机201固定安装于第一机座202远离支座205一侧,第一电机201出轴通过联轴器203与小齿轮204固定连接,联轴器203位于第一机座202与支座205之间,小齿轮204与大齿轮206分别转动连接于两个支座205之间,且小齿轮204与大齿轮206相互啮合;在本实施例中,绳轮208及滑轮211分别设有两个,两个绳轮208转动连接于两个支座205的外侧,且绳轮208与大齿轮206共轴连接,滑轮211转动连接于滑轮支架210;拉绳209一端固定于绳轮208的轮槽内,并绕过滑轮211,拉绳209另一端绑定于螳螂触角1上,且拉绳209分别与绳轮208及滑轮211转动连接。
35.当需要该动态表演螳螂的触角摆动时,先启动第一电机201,动力经由联轴器203、小齿轮204、大齿轮206传输至绳轮208,根据第一电机201转动方向的不同,拉绳209卷绕在绳轮208上或绕出,使其与螳螂触角1连接的末端执行拉和松的动作。在本实施例中,螳螂触角1主要采用弹性材料,依照拉绳209的拉和松动作,螳螂触角1可作出弯曲和恢复的动作,从而模拟螳螂触角1摆动。
36.请参照图5,翅膀扇动机构3包括螳螂翅膀310、安装座303、第二驱动组件、移动副及第一联动组件。其中,第二驱动组件、移动副及第一联动组件分别设于安装座303,螳螂翅膀310安装于第一联动组件上,通过第二驱动组件驱动移动副做直线运动,进而移动副带动第一联动组件及螳螂翅膀310摆动。
37.第二驱动组件包括第二电机301、第一摆臂304及随动轴承305,移动副包括带槽滑块306及导轨307。其中,安装座303固定于躯干骨架背部,第二电机301固定安装于安装座303外侧,第二电机301出轴固定连接于第一摆臂304的中心位置,第一摆臂304为偏心结构,第一摆臂304的偏心端与随动轴承305铰接连接;导轨307竖直安装于安装座303内侧,带槽滑块306设有横向滑槽,随动轴承305安装于滑槽内,第一摆臂304可带动随动轴承305沿滑槽滑动。在此,随动轴承305带动带槽滑块306沿导轨307的长度方向做往复直线运动。
38.第一联动组件包括翅膀转轴302、第一连杆308、翅膀夹块309及第一关节轴承311,且对称设置。以一侧的第一联动组件为例,第一连杆308中部为螺杆,两端为关节轴承,第一连杆308两端的关节轴承分别与带槽滑块306及翅膀夹块309铰接,螳螂翅膀310固定在翅膀夹块309上,且翅膀夹块309沿翅膀转轴302的长度方向固定;翅膀转轴302两端分别与两个第一关节轴承311的轴承端转动连接,两个第一关节轴承311的另一端固定于安装座303上,翅膀转轴302转动可带动与其固定连接的翅膀夹块309及螳螂翅膀310摆动。
39.当需要该动态表演螳螂的翅膀扇动时,先启动第二电机301,第二电机301出轴驱动第一摆臂304中心旋转,第一摆臂304的偏心端带动随动轴承305转动;同时,带槽滑块306沿导轨307的长度方向进行往复直线运动,使得带槽滑块306带动第一连杆308一端做直线运动,第一连杆308另一端带动翅膀夹块309转动,进而带动螳螂翅膀310绕翅膀转轴302中
心线旋转,实现螳螂翅膀310的扇动。
40.请参照图6,嘴巴张合机构4包括下颚401、第二安装组件、第三驱动组件及第二联动组件。其中,第三驱动组件及第二联动组件分别设于第二安装组件上,下颚401固定于第二联动组件,第三驱动组件驱动第二联动组件转动,以使第二联动组件带动下颚401摆动。
41.第二安装组件包括第二机座407及安装板408,第三驱动组件包括第三电机404、第二连杆405及第二摆臂406,第二联动组件包括第二关节轴承403及连接板402。其中,安装板408固定于躯干骨架头部,第二机座407与安装板408相固定;第三电机404固定于第二机座407上,第三电机404出轴与第二摆臂406一端铰接,第二摆臂406为偏心结构,第二摆臂406的偏心端与第二连杆405一端的关节轴承铰接,第二连杆405另一端的关节轴承与连接板402铰接,且第二连杆405两铰点之间的距离大于第二摆臂406两铰点之间的距离;第二关节轴承403设有两个,两个第二关节轴承403一端分别固定于安装板408两端,另一端分别与连接板402铰接,且下颚401固定于连接板402上。
42.当需要该动态表演螳螂的嘴巴张合时,先启动第三电机404,第三电机404出轴驱动第二摆臂406旋转,第二摆臂406的偏心端带动第二连杆405转动,使得第二连杆405远离第二摆臂406一端拉动连接板402与下颚401绕第二关节轴承403的中心轴线摆动,从而模拟下颚401的张合动作。另外,第二摆臂406的偏心端相邻开设有第一安装孔位及第二安装孔位406.1,且第一安装孔位与第二安装孔位406.1的中心距不同,第二连杆405可分别铰接于第一安装孔位或第二安装孔位406.1内,以调节第二连杆405的运动幅度,进而调节下颚401的摆动幅度。
43.本技术实施例一种动态表演螳螂机构的实施原理为:当需要该动态表演螳螂的触角摆动时,先启动第一电机201,动力经由联轴器203、小齿轮204、大齿轮206传输至绳轮208,根据第一电机201转动方向的不同,拉绳209卷绕在绳轮208上或绕出,使其与螳螂触角1连接的末端执行拉和松的动作。在本实施例中,螳螂触角1主要采用弹性材料,依照拉绳209的拉和松动作,螳螂触角1可作出弯曲和恢复的动作,从而模拟螳螂触角1摆动。
44.当需要该动态表演螳螂的翅膀扇动时,先启动第二电机301,第二电机301出轴驱动第一摆臂304中心旋转,第一摆臂304的偏心端带动随动轴承305转动;同时,带槽滑块306沿导轨307的长度方向进行往复直线运动,使得带槽滑块306带动第一连杆308一端做直线运动,第一连杆308另一端带动翅膀夹块309转动,进而带动螳螂翅膀310绕翅膀转轴302中心线旋转,实现螳螂翅膀310的扇动。
45.当需要该动态表演螳螂的嘴巴张合时,先启动第三电机404,第三电机404出轴驱动第二摆臂406旋转,第二摆臂406的偏心端带动第二连杆405转动,使得第二连杆405远离第二摆臂406一端拉动连接板402与下颚401绕第二关节轴承403的中心轴线摆动,从而模拟下颚401的张合动作。
46.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!