龟的流水屠宰装置及其浮动式夹爪机械手的制作方法-j9九游会真人
1.本发明涉及流水屠宰设备技术领域,具体是指用于流水屠宰龟类动物的装置。
背景技术:
2.目前,龟类动物的屠宰都是采用人工屠宰,要先砍断龟的背壳和腹壳之间的连接部,然后再割肉分拣内脏。由于是人工屠宰,屠宰工人都是一手抓龟,一手拿刀具的,屠宰效率低,而且卫生环境差。因此,有必要研发一种可替代人工抓龟和切壳的流水屠宰装置。
技术实现要素:
3.本发明要解决的技术问题是提供一种可替代人工抓龟和切壳的流水屠宰装置。
4.为解决上述技术问题所采用的技术方案:一种龟的流水屠宰装置,其特征在于:包括有回转输送线,回转输送线上安装有间距布设的用以夹爪固定龟的夹爪机械手,沿着回转输送线方向依次安装有横向往复移动且上下升降可夹住龟壳的夹放机械手以及用以切割龟的背壳和腹壳的连接部的切割机械手,回转输送线的对应夹放机械手的侧部也固定有夹爪机械手。
5.在上述基础上,所述夹放机械手平行设置有两组。
6.安装在回转输送线上的夹爪机械手具有若干呈手爪状布设同步开合的夹指,所有夹指均与一铰接座铰接,且所有夹指均与一滑座滑动连接,滑座由动力装置驱动其滑动。
7.固定在回转输送线侧部的夹爪机械手采用了浮动式夹爪机械手,包括有夹爪机械手,所述夹爪机械手设成响应重量而上下浮动安装。
8.在上述基础上,所述夹爪机械手包括呈十字交叉布设的夹块,夹块分别固定在一滑座上,滑座设成两两相对滑动安装,设一固定的双向驱动装置,双向驱动装置的两端分别与相应侧的滑座驱动连接。
9.所述夹爪机械手上下滑动地安装在固定机架上,固定机架铰接一摇臂,摇臂的一端与夹爪机械手之间铰接一连杆,另一端吊装有配重。
10.在上述基础上,所述夹爪机械手设有限制其上升过高的限高装置。
11.在上述基础上,所述夹放机械手与切割机械手之间设有用以测量龟的大小的检测装置。
12.采用本发明所带来的有益效果:本发明龟的流水屠宰装置从龟的抓放、龟的固定输送以及龟壳的切割都实现了机械自动替代,而且在无法机械替代的人工割肉分拣环节,替代了人工抓龟。在回转输送线上,工人可双手操作割肉分拣,极大地降低了工人的劳动强度,提高工作效率,改善工作环境卫生问题。
附图说明
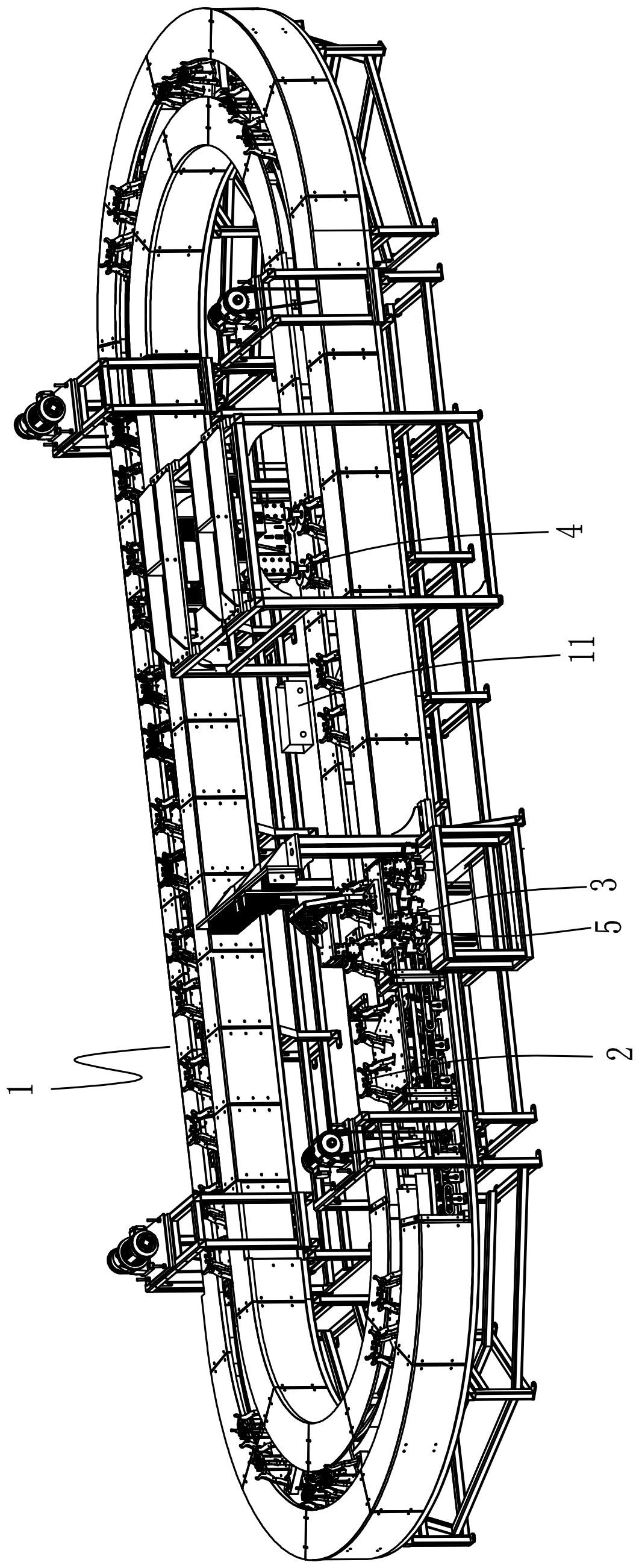
13.图1为本发明龟的流水屠宰装置的结构示意图;图2为本发明中安装在回转输送线上的夹爪机械手的结构示意图;
图3为本发明中固定在回转输送线侧部的浮动式夹爪机械手的结构示意图。
实施方式
14.如图1所示,一种龟的流水屠宰装置,包括有回转输送线1,回转输送线1上安装有间距布设的用以夹爪固定龟的夹爪机械手2,沿着回转输送线1方向依次安装有横向往复移动且上下升降可夹住龟壳的夹放机械手3以及用以切割龟的背壳和腹壳的连接部的切割机械手4,回转输送线1的对应夹放机械手3的侧部也固定有夹爪机械手5。其中,在本流水屠宰装置中,龟是以腹壳朝上的形式夹爪固定的。
15.回转输送线1为常规设备,具有同一平面循环回转输送的机构。
16.夹爪机械手2和5也属于常规的呈手爪状开合的机构,合上后可夹爪住龟壳四周的边缘,实际上也是夹爪住龟壳的背壳,以此来固定着龟在回转输送线上输送,其开合方式可采用铰接开合,也可采用平移开合。如图2所示,其中间距安装在回转输送线1上的夹爪机械手2采用了铰接开合,具有若干呈手爪状布设同步开合的夹指2.1,所有夹指2.1均与一铰接座2.2铰接,且所有夹指2.1均与一滑座2.3滑动连接,滑座2.3由动力装置驱动其滑动,本事实例的动力装置采用了气缸2.4。气缸2.4驱动滑座2.3移动,移动的滑座2.3驱使所有夹指2.1同步开合。为保证夹爪机械手2的可靠夹爪,可加装保持滑座2.3向着合上夹指2.1方向移动趋势的弹簧2.5。
17.夹放机械手3也属于常规设备,采用的是平移开合形式,是常见的对夹机构。由于夹放机械手3需要从回转输送线1的外侧把龟夹起移送至回转输送线1的夹爪机械手2上,因此,要为夹放机械手3加装常规的横向往复移动机构和上下升降机构。
18.为保证夹放机械手3能够准确稳定地夹取龟,在回转输送线1的对应夹放机械手3的侧部也固定有夹爪机械手5。操作上,需要人工抓住龟放至夹爪机械手5上夹爪固定,然后夹放机械手3从夹爪机械手5上夹起龟,平移入回转输送线1上再把龟下放至夹爪机械手2上。
19.由于夹爪机械手2和5夹龟的部位是对应龟的四脚的开口部,而夹放机械手3夹龟的部位是龟的腹壳和背壳的连接部,对于不同大小规格的龟,其开口部和连接部的高度差别是很大的,高度差大体上和龟的重量成正比,因此为保证夹放机械手3的精准控制和可靠运行,需要对高度差进行抵消补偿,将固定在回转输送线侧部的夹爪机械手5采用了浮动式夹爪机械手,该夹爪机械手设成响应重量而上下浮动安装。
20.如图3所示,所述夹爪机械手5包括呈十字交叉布设的夹块5.1,夹块5.1分别固定在一滑座5.2上,滑座5.2设成两两相对滑动安装,设一固定的双向驱动装置5.3,双向驱动装置5.3的两端分别与相应侧的滑座5.2驱动连接。双向驱动装置5.3可驱动两侧的滑座5.2同步相向滑动,进而驱动所有夹块5.1同步开合。夹块5.1可设成具有相应夹角的夹块,利用夹角夹住背壳的边缘。本实施例中的双向驱动装置5.3采用了双向气缸,双向气缸的活塞杆与滑座5.2的驱动连接采用了连杆铰接,当然,也可采用其它常规的比如推块滑动连接。
21.所述夹爪机械手5上下滑动地安装在固定机架6上,固定机架6铰接一摇臂7,摇臂7的一端与夹爪机械手5之间铰接一连杆8,另一端吊装有配重9。
22.进一步地,所述夹爪机械手5设有限制其上升过高的限高装置10,该限高装置采用了常规的限高拉杆。
23.切割机械手4也属于常规设备,具有两侧相向开合的平移机构,平移机构的两侧分别安装切割机组,龟移送到位后,两侧的切割机组相向移动,对龟壳两侧的背壳和腹壳的连接部进行切割。后序输送线上可依流水方向合理安排多个割肉分拣工位,以及时完成切割后的龟的割肉分拣。
24.为进一步地提升生产效率,所述夹放机械手3可平行设置有两组,因此可同时夹住两龟壳,那么当完成割肉分拣的龟壳回转至夹放机械手3时,此时的夹放机械手3的一组夹住夹爪机械手2上的龟壳,同时另一组夹住夹爪机械手5上的待屠宰龟,夹起平移后把带屠宰龟移送至夹爪机械手2的同时把龟壳移出回转输送线1的外侧。
25.为实现龟壳的精准切割,所述夹放机械手3与切割机械手4之间设有用以测量龟的大小的检测装置11,实际上检测装置11也是测量龟壳的大小,以便于为切割机械手4的切割机组的进给量提供精准的切割数据。
技术特征:
1.一种浮动式夹爪机械手,包括有夹爪机械手,其特征在于:所述夹爪机械手设成响应重量而上下浮动安装。2.根据权利要求1所述的浮动式夹爪机械手,其特征在于:所述夹爪机械手包括呈十字交叉布设的夹块,夹块分别固定在一滑座上,滑座设成两两相对滑动安装,设一固定的双向驱动装置,双向驱动装置的两端分别与相应侧的滑座驱动连接。3.根据权利要求1所述的浮动式夹爪机械手,其特征在于:所述夹爪机械手上下滑动地安装在固定机架上,固定机架铰接一摇臂,摇臂的一端与夹爪机械手之间铰接一连杆,另一端吊装有配重。4.根据权利要求1-3任一所述的浮动式夹爪机械手,其特征在于:所述夹爪机械手设有限制其上升过高的限高装置。5.一种龟的流水屠宰装置,包括有回转输送线,其特征在于:所述回转输送线上安装有间距布设的用以夹爪固定龟的夹爪机械手,沿着回转输送线方向依次安装有横向往复移动且上下升降可夹住龟壳的夹放机械手以及用以切割龟的背壳和腹壳的连接部的切割机械手,回转输送线的对应夹放机械手的侧部也固定有夹爪机械手。6.根据权利要求1所述的龟的流水屠宰装置,其特征在于:所述夹放机械手平行设置有两组。7.根据权利要求1所述的龟的流水屠宰装置,其特征在于:安装在回转输送线上的夹爪机械手具有若干呈手爪状布设同步开合的夹指,所有夹指均与一铰接座铰接,且所有夹指均与一滑座滑动连接,滑座由动力装置驱动其滑动。8.根据权利要求1所述的龟的流水屠宰装置,其特征在于:固定在回转输送线侧部的夹爪机械手采用了权利要求1所述的浮动式夹爪机械手。9.根据权利要求5-8任一所述的龟的流水屠宰装置,其特征在于:所述夹放机械手与切割机械手之间设有用以测量龟的大小的检测装置。
技术总结
本发明公开一种龟的流水屠宰装置及其浮动式夹爪机械手,在回转输送线上安装有间距布设的用以夹爪固定龟的夹爪机械手,沿着回转输送线方向依次安装有横向往复移动且上下升降可夹住龟壳的夹放机械手以及用以切割龟的背壳和腹壳的连接部的切割机械手,回转输送线的对应夹放机械手的侧部也固定有夹爪机械手。固定在回转输送线侧部的夹爪机械手采用了浮动式夹爪机械手,浮动夹爪机械手响应重量而上下浮动。本发明从龟的抓放、龟的固定输送以及龟壳的切割都实现了机械自动替代,降低了工人的劳动强度,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:刘俊
受保护的技术使用者:佛山市盈佳瑞机械科技有限公司
技术研发日:2023.09.18
技术公布日:2023/10/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!