一种通信约束的无人机编队鲁棒控制方法及系统-j9九游会真人
1.本发明属于无人机编队控制的技术领域,尤其涉及一种通信约束的无人机编队鲁棒控制方法及系统。
背景技术:
2.随着科技的快速发展,无人机编队技术受到越来越多的领域关注。目前,已被广泛应用于军事打击、区域搜索、货物运输、抢险救灾等军事和民用领域。然而,随着编队规模越来越大,对控制方式的水平、通信带宽和无人机携带的处理器能力也有更高的要求。
3.无人机的编队在运动过程中,编队成员之间需要保持通信交互,来获取自身相对信息。但是在实际复杂环境中,受到恶劣天气、电磁干扰等众多不可控因素,导致各无人机机间通信会受到有限通信带宽、传感器故障等影响,严重导致信息交互过程中时延、数据丢失等通信约束的情况。目前,通信约束作为无人机编队运动中的一个重要难题目前,一些专利文献已提出了无人机编队控制方法,如:中国专利cn111522361b公开了一种从模式的多无人机编队一致性控制方法。中国专利cn111766899b公开了一种基于干扰观测器的四旋翼无人机集群抗干扰编队控制方法,虽然现有的一些控制方法可以在一定意义上减少甚至消除通信约束的影响,但是在时延较大或者成员丢失的情况下,不能抑制对编队控制系统稳定性的影响。
技术实现要素:
4.鉴于上述问题,本发明公开了一种通信约束的无人机编队鲁棒控制系统及方法,用以解决现有技术中的无人机编队受到严重通信约束影响导致无法稳定的控制编队的问题。
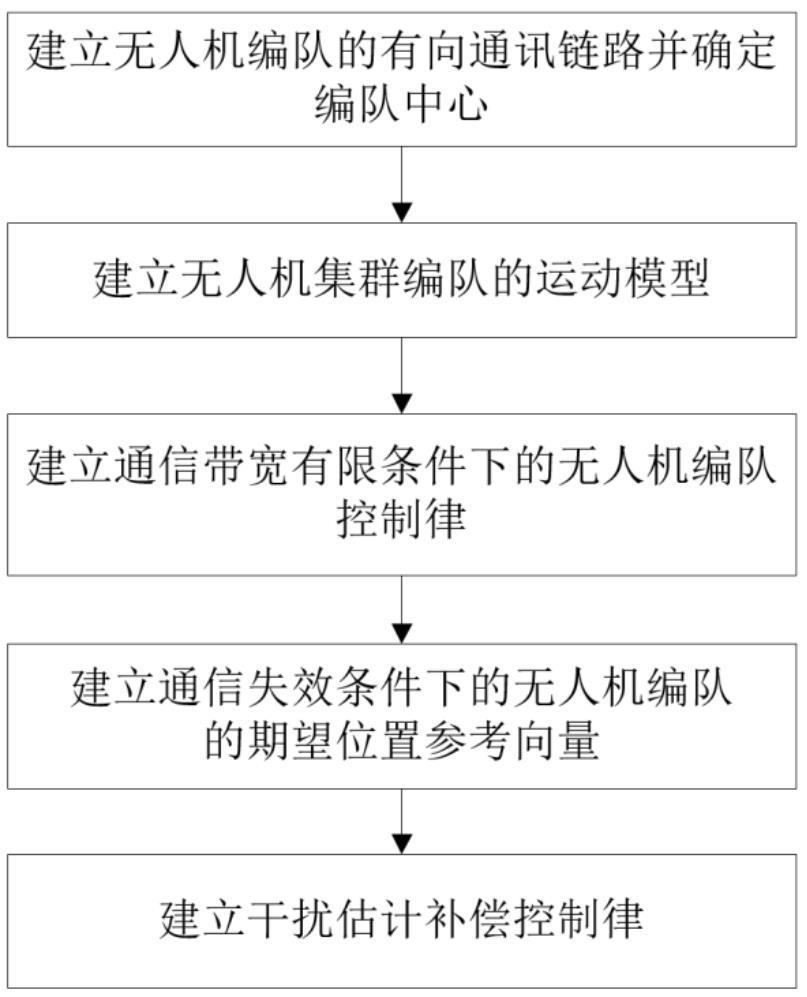
5.本发明一方面,提供了一种通信约束的无人机编队鲁棒控制方法,包括以下步骤:步骤一、建立无人机编队的有向通讯链路并确定编队中心:无人机编队的有向通讯链路表示为:g=(v,e);其中,v为无人机节点的集合,v={t1,t2,
…
,tn},n为无人机节点的总数;无人机节点ti与无人机节点tj之间有信息交换,二者互为邻居节点,i∈n,j∈n,i≠j,每对邻居节点之间的边为(i,j)和(j,i);e为无人机节点中邻居节点之间边的集合,e={(i,j),(j,i)},a=[a
ij
]表示邻居权重矩阵;a
ij
表示无人机节点ti与无人机节点ti的第j架邻居无人机通信的权重系数;无人机节点ti的邻居无人机节点tj集合为ni,ni={(tj|j=1,2,
…
,s, (i,j)∈e},s为无人机节点ti的邻居无人机节点tj总数;惯性坐标系中,编队中心的位置坐标为p0=[x0,y0,z0];无人机节点ti的位置坐标为pi=[xi,yi,zi];无人机节点ti的邻居无人机节点tj的位置坐标为pj=[xj,yj,zj];步骤二、建立无人机集群编队的运动模型:
其中,mi表示无人机节点ti的质量;表示无人机节点ti在飞行过程中的速度向量;表示无人机节点ti在飞行过程中的加速度向量;bi表示无人机节点ti的系统参数矩阵;ui表示无人机节点ti产生的控制力输入;gi表示无人机节点ti在飞行过程中受到的重力;ci表示无人机节点ti的受到的阻力系数矩阵;表示无人机节点ti受到的外界干扰影响;步骤三、根据步骤二中的无人机集群编队的运动模型,建立通信约束条件下的无人机节点的控制律;步骤四、根据步骤三的通信约束条件下的无人机节点的控制律,搭建通信失效条件下的无人机编队的期望位置参考向量生成模块,基于无人机编队的期望位置参考向量生成模块建立通信失效条件下的无人机节点的期望位置参考向量;步骤五、根据步骤二中的无人机集群编队的运动模型,建立干扰估计补偿控制律。
[0006]
可选地,步骤三中的通信约束条件下的无人机节点ti的控制律表达式为:其中,表示无人机节点ti的系统参数矩阵bi的逆矩阵;k1和k2表示无人机节点ti的控制器增益矩阵;表示无人机节点ti与编队中心的位置偏差;表示无人机节点ti与编队中心的速度偏差;l
ij
表示无人机节点ti与邻居无人机节点tj的位置偏差;表示无人机节点ti与邻居无人机节点tj之间的速度偏差;为无人机节点ti的当前通信时刻;为无人机节点ti的下一通信时刻;表示无人机节点ti在当前时刻的位置采样值;表示无人机节点ti在当前时刻的速度采样值;表示无人机编队中心在当前时刻的位置采样值;表示无人机编队中心在当前时刻的速度采样值;表示邻居无人机节点tj在当前时刻的位置采样值;表示邻居无人机节点tj在当前时刻的速
度采样值;表示下一通信时刻控制律激活的第一参数,表示下一通信时刻控制律激活的第二参数,表示下一通信时刻控制律激活的第三参数;表示无人机节点ti的实际位置与当前时刻的位置采样值之间的误差向量;e表示自然对数的底数;t表示无人机编队执行任务的飞行时间。
[0007]
可选地,步骤四中的无人机节点的期望位置参考向量的表达式为:其中,表示无人机节点ti期望位置估计值;表示无人机节点ti期望速度估计值;表示无人机节点ti期望加速度估计值;表示无人机节点ti的期望位置参考向量生成参数矩阵;表示无人机节点ti的期望位置参考向量生成第一常量系数;表示无人机节点ti的期望位置参考向量生成第二常量系数;表示邻居无人机节点tj期望位置估计值;表示邻居无人机节点tj期望速度估计值;表示一个3
×
3零矩阵。
[0008]
可选地,步骤五中的无人机节点干扰估计补偿控制律为:其中,表示无人机节点ti受到的干扰第一状态估计值,表示无人机节点ti受到的干扰第二状态估计值;,表示干扰第一估计值和干扰第二估计值的微分;表示干扰补偿控制律调节参数;表示一个3
×
3单位矩阵;表示干扰估计值。
[0009]
本发明的另一方面,提供了一种通信约束的无人机编队鲁棒控制系统,使用前述的控制方法对无人机集群进行通信约束影响的编队控制,包括通信带宽有限条件下的无人机节点控制模块、通信失效条件下的无人机编队期望位置参考向量生成模块和干扰估计补偿控制模块;通信带宽有限条件下的无人机节点控制模块,用于实现有限通信带宽下的编队飞行;
通信失效条件下的期望位置参考向量生成模块,用于生成无人机编队的期望位置参考向量;干扰估计补偿控制模块,用于抑制通信干扰和外界干扰影响。
[0010]
与现有技术相比,本发明至少可实现如下有益效果之一:(1)本发明的通信约束下的无人机鲁棒编队控制方法,通过生成无人机期望的飞行位置,减少无人机之间通信交互,解决了传统控制方法受到严重通信干扰影响导致无法稳定的控制编队的问题。
[0011]
(2)本发明的通信失效条件下的期望位置参考向量生成模块,能够生成无人机编队的期望位置参考向量;解决了传统控制方法受到严重通信干扰影响导致无法稳定的控制编队的问题。
[0012]
(3)本发明的干扰估计补偿控制模块,可以有效抑制通信干扰和外界干扰影响。具有较好的鲁棒性,实现无人机编队安全稳定完成期望的编队任务。
[0013]
(4)本发明的方法复杂度低,易于实现。
附图说明
[0014]
图1是本发明控制方法设计步骤流程图;图2是无人机在惯性坐标系和本体坐标系下示意图;图3是本发明无人机集群编队控制系统的结构图;图4是本发明的实施例中3架无人机集群编队通讯拓扑结构图;图5是本发明的实施例中3架无人机飞行时的三维飞行轨迹。
具体实施方式
[0015]
下面结合附图和具体实施例,对本发明进行详细描述。
[0016]
在本发明中,为了实现对无人机节点的状态表征,使用惯性坐标系e
地-oxyz和无人机节点的本体坐标系e
体-obxbybzb;其中,惯性坐标系e
地-oxyz为与地球表面固连的坐标系,坐标系原点o选取在地平面一点上,ox轴为指向目标的方向,oy轴垂直于ox轴,oz轴与其它两轴垂直并构成右手直角坐标系;无人机节点的本体坐标系e
体-obxbybzb为与无人机节点本体固连,本体坐标系原点ob在无人机节点的质心处(质心);obxb轴在无人机节点对称平面内并平行于无人机节点的轴线指向前方;obyb轴垂直于obxb轴;obzb轴在无人机节点对称平面内,与obxb轴和obxb轴垂直并构成右手直角坐标系。
[0017]
本发明的一个实施例,如图1-图3,公开了一种通信约束的无人机编队鲁棒控制方法,如图1所示,包括以下步骤:步骤一、建立无人机编队的有向通讯链路并确定编队中心:无人机编队的有向通讯链路表示为:g=(v,e);其中,v为无人机节点的集合,v={t1,t2,
…
,tn},n为无人机节点的总数;无人机节点ti与无人机节点tj之间有信息交换,二者互为邻居节点,i∈n,j∈n,i≠j,每对邻居节点之间的边为(i,j)和(j,i);e为无人机节点中邻居节点之间边的集合,e={(i,j),(j,i)},a=
[a
ij
]表示邻居权重矩阵;a
ij
表示无人机节点ti与无人机节点ti的第j架邻居无人机通信的权重系数;无人机节点ti的邻居无人机节点tj集合为ni,ni={(tj| j=1,2,
…
,s, (i,j)∈e},s为无人机节点ti的邻居无人机节点tj总数。
[0018]
如图2所示,无人机节点ti在惯性坐标系e
地-oxyz中所在的位置,定义如下:pi表示无人机节点ti在地面坐标系e
地-oxyz中的坐标向量,pi=[xi,yi,zi]
t
。
[0019]
xi表示无人机节点ti在地面坐标系e
地-oxyz中x方向上的坐标。
[0020]
yi表示无人机节点ti在地面坐标系e
地-oxyz中y方向上的坐标。
[0021]
zi表示无人机节点ti在地面坐标系e
地-oxyz中z方向上的坐标。
[0022]
由此,无人机节点ti的邻居无人机节点tj在惯性坐标系e
地-oxyz中所在的位置,定义如下:pj表示邻居无人机节点tj在地面坐标系e
地-oxyz中的坐标向量,pj=[xj,yj,zj]
t
。
[0023]
xj表示邻居无人机节点tj在地面坐标系e
地-oxyz中x方向上的坐标。
[0024]
yj表示邻居无人机节点tj在地面坐标系e
地-oxyz中y方向上的坐标。
[0025]
zj表示邻居无人机节点tj在地面坐标系e
地-oxyz中z方向上的坐标。
[0026]
如果无人机编队的有向通讯链路中存在一个无人机节点使得该无人机节点到其他所有的无人机节点都有路径,则有向图通讯链路g包含一个生成树,该无人机节点叫做树的根节点。
[0027]
在本实施例中,无人机编队的根节点为无人机编队的中心,即:无人机编队的中心节点;该编队中心在惯性坐标系中的位置为p0=[x0,y0,z0]
t
。
[0028]
可以理解的是,编队成员为参与编队的所有无人机节点中除了编队中心的其他无人机节点。
[0029]
步骤二、建立无人机集群编队的运动模型:其中,mi表示无人机节点ti的质量;表示无人机节点ti在飞行过程中的位置向量;表示无人机节点ti在飞行过程中的速度向量;表示无人机节点ti在飞行过程中的加速度向量;bi表示无人机节点ti的系统参数矩阵;ui表示无人机节点ti产生的控制力输入;gi表示无人机节点ti在飞行过程中受到的重力;ci表示无人机节点ti的受到的阻力系数矩阵;表示无人机节点ti受到的外界干扰影响;步骤三、根据步骤二中的无人机集群编队的运动模型,建立通信约束条件下的无人机节点ti的控制律。
[0030]
通信约束条件下的无人机节点ti的控制律表达式为:
其中,表示无人机节点ti的系统参数矩阵bi的逆矩阵;k1和k2表示无人机节点ti的控制器增益矩阵;表示无人机节点ti与编队中心的位置偏差;表示无人机节点ti与编队中心的速度偏差;l
ij
表示无人机节点ti与邻居无人机节点tj的位置偏差;表示无人机节点ti与邻居无人机节点tj之间的速度偏差;为无人机节点ti的当前通信时刻;为无人机节点ti的下一通信时刻;表示无人机节点ti在当前时刻的位置采样值;表示无人机节点ti在当前时刻的速度采样值;表示邻居无人机节点tj在当前时刻的位置采样值;表示邻居无人机节点tj在当前时刻的速度采样值,优选地,,,;表示无人机节点ti的实际位置与当前时刻的位置采样值之间的误差向量;e表示自然对数的底数,为一个常数;t表示时间。
[0031]
步骤四、根据步骤三的通信约束条件下的无人机节点ti的控制律,搭建通信失效条件下的无人机编队的期望位置参考向量生成模块,基于无人机编队的期望位置参考向量生成模块建立通信失效条件下的无人机节点ti的期望位置参考向量。
[0032]
在复杂环境下,编队成员有一定几率无法获取编队信息,发生通信失效。当无人机节点ti无法收到编队成员信息时,建立通信失效条件下的无人机节点ti的期望位置参考向量,根据自身的稳定控制器实现编队飞行。
[0033]
无人机节点的期望位置参考向量的表达式为:
(0)=[-30]
t
m。
[0040]
根据步骤二建立无人机集群编队的运动模型;设置无人机模型参数如下:mi=1kg,gi=9.81n,bi=diag{1,1,1},ci=diag{0,0,0}。无人机集群受到的外界干扰设置为n,其中,t表示时间,本实施例考虑的外界环境干扰为随着时间变化的。
[0041]
根据步骤三建立通信带宽有限条件下的无人机控制律,为了计算控制律,给出每架无人机与编队中心的位置偏差如下:m,m,m。控制器增益矩阵k1=diag{1,1,1},k2=diag{0.7,0.7,0.7}。根据以上设置条件控制器可以计算通信带宽有限条件下的无人机控制输入u
ie
。
[0042]
根据步骤四建立通信失效条件下的无人机期望位置参考向量模块,生成无人机编队期望位置参考向量。参数设置如下:,,。
[0043]
根据步骤五建立干扰估计补偿控制律,设置干扰估计补偿控制参数,根据此参数控制器会计算得到无人机总干扰估计值。
[0044]
仿真结果分析,从图5可以看出,本发明能够使无人机集群编队实现较好的协同。此外,还能够有效抑制系统模型未知和外界干扰的影响,具有很好的鲁棒性。
[0045]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!