使用概率代理模型来控制蒸汽压缩系统的制作方法-j9九游会真人
1.本公开总体上涉及蒸汽压缩系统,并且更特别地,涉及用于控制蒸汽压缩系统的运行的设备和方法。
背景技术:
2.诸如热泵、制冷和空调系统之类的蒸汽压缩系统在工业和住宅应用中被广泛使用。用于蒸汽压缩循环的变速压缩机、可变位置阀、以及变速风扇的引入极大地提高了蒸汽压缩系统的运行灵活性。通过控制蒸汽压缩系统的可变组件可以提高蒸汽压缩系统的效率。换句话说,可以将控制输入提供给蒸汽压缩系统以提高效率。例如,可以调整压缩机的速度以调制制冷剂的流速。可以改变蒸发器风扇和冷凝器风扇的速度,以改变空气与热交换器之间的热传递。膨胀阀开度的变化可以影响蒸汽压缩系统中的高压与低压之间的压降,这进而影响制冷剂的流速以及对应蒸发器出口处的过热温度。
3.到蒸汽压缩系统的递送特定量的热的控制输入的组合通常不是唯一的,并且控制输入的各种组合消耗不同量的能量。因此,希望使用最小化能量并且最大化蒸汽压缩系统的能量效率的控制输入的组合来运行蒸汽压缩系统。
4.最大化能量效率的一些方法依赖于使用蒸汽压缩系统的物理学的数学模型。这种基于模型的方法尝试描述蒸汽压缩系统的控制输入对蒸汽压缩系统的热力学行为和能耗的影响。在这种基于模型的方法中,使用现有的分析模型来预测满足热负载要求并最小化能量的控制输入的组合。
5.然而,用于控制输入的组合的这种预测的数学模型的使用包括缺点。例如,数学模型依靠简化假设以便生成数学上易处理的表示。这种假设忽略了重要的影响或者没有考虑特定安装特征(诸如房间尺寸),从而导致数学模型偏离蒸汽压缩系统的实际行为。另外,数学模型难以导出和校准。例如,描述蒸汽压缩系统的组件(例如,压缩机)的运行的参数是针对所使用的各种类型的压缩机通过实验确定的,并且蒸汽压缩系统的数学模型可以具有多个这样的参数。因此,确定各个数学模型的参数的值是冗长的过程。而且,蒸汽压缩系统可以随时间发生改变。当蒸汽压缩系统例如因制冷剂缓慢泄漏或者热交换器上的腐蚀累积而改变时,在一个时间准确地描述蒸汽压缩系统的运行的数学模型在稍后的时间可能不准确。
6.一些方法旨在优化控制输入而不采用数学模型。例如,使用极值搜索控制器(esc)以按无模型方式来优化控制输入。然而,esc可能花费几个小时来收敛至最优设定点。而且,由于作用在蒸汽压缩系统上的扰动具有更快的动力学特性,因此最优设定点可以在esc收敛之前发生改变。esc的这种缓慢收敛特性代表了对蒸汽压缩系统的性能的实时优化的j9九游会真人的解决方案的障碍。
7.另外,esc在数值上构造局部梯度并将该局部梯度追踪(chase)至局部最优。这样的过程可能是缓慢的。例如,如果esc的控制增益太小并且待优化的基础函数包括小梯度,那么收敛将是缓慢的。相反地,如果esc控制增益太大并且基础函数是非线性的,那么esc的
迭代解可能因大的梯度而超出最优设定点。因此,esc与具有高度非线性动力学的非凸问题不兼容。
8.为了克服esc的缓慢收敛特性,使用了滤波器。滤波器分离了对扰动的响应的暂态部分的相位的影响。然而,滤波器的设计复杂并且需要关于蒸汽压缩系统的大量信息。
技术实现要素:
9.一些实施方式的目的是,提供一种用于确定使蒸汽压缩系统的功耗最小化的设定点的最优组合而不使用基础系统动力学的分析模型的数据驱动方法。这样的目的可以通过公式制定代理模型来实现。而且,一些实施方式的目的在于提供一种贝叶斯优化热启动方法,该方法涉及代理模型以加速极值搜索控制器(esc)的收敛。
10.诸如热泵、制冷和空调系统之类的蒸汽压缩系统(vcs)在工业和住宅应用中被广泛使用。用于蒸汽压缩循环的变速压缩机、可变位置阀、以及变速风扇的引入提高了vcs的运行灵活性。具体地,到vcs的递送特定量的热的控制输入的组合通常不是唯一的,并且控制输入的不同组合可以具有不同的运行成本。例如,根据控制vcs的致动器的状态的控制输入的两种不同组合而运行的vcs可以递送相同的热容量,但是可以消耗不同量的能量。因此,希望使用例如最小化能耗和/或最大化vcs的能量效率的优化运行成本的控制输入的组合来运行vcs。
11.致力于vcs的能量效率的控制方法可以分成两类:基于模型的控制方法和数据驱动的控制方法。基于模型的方法尝试描述vcs的控制输入对vcs的热力学行为和能耗的影响。在这种基于模型的方法中,使用现有的分析模型来预测满足热负载要求并最小化能耗的控制输入的组合。然而,vcs的不同配置的分析模型难以随时间导出、校准、以及更新。例如,对于至少包括与布置在一个或更多个室内区域中的多个热交换器连接的单个压缩机的多区域蒸汽压缩系统(mz-vcs),难以公式制定分析模型。换句话说,mz-vcs的复杂性可以阻止对应分析模型的使用。
12.在缺少动力学系统(诸如vcs)的准确模型的情况下,一些控制方法利用由动力学系统实时生成的运行数据,以便构造使动力学系统的动力学稳定的控制策略。使用运行数据来设计控制策略被称为数据驱动控制。存在两种数据驱动控制方法:间接方法和直接方法。间接方法包括构造动力学系统的代理模型以及利用代理模型来设计控制器。直接方法包括在没有中间模型构建步骤的情况下基于运行数据来直接构造控制策略。间接方法的缺点是在模型构建阶段潜在需要大量的数据。相反地,直接方法需要较少的数据,但是即使是前沿直接控制方法也在处理状态和输入约束方面经历困难,而所述状态和输入约束对于在诸如vcs的闭环控制系统中维持安全运行是必不可少的。
13.为此,一些实施方式的目的是提供一种用于vcs的闭环控制的间接数据驱动控制方法。这种闭环控制方法可能不会遭受基于模型的控制方法的复杂性以及直接数据驱动控制方法的不稳定性。然而,为了提供这样的间接数据驱动控制,需要生成可以高效地管理vcs的运行的代理模型。
14.一些实施方式基于这样的实现,即,在构造用于控制vcs的这种代理模型中存在若干障碍。例如,为了构造代理模型,存在针对vcs的致动器的控制输入的值的、需要被探索的大且实际上无限的连续空间。为了解决该问题,一些实施方式将vcs的致动器的控制输入的
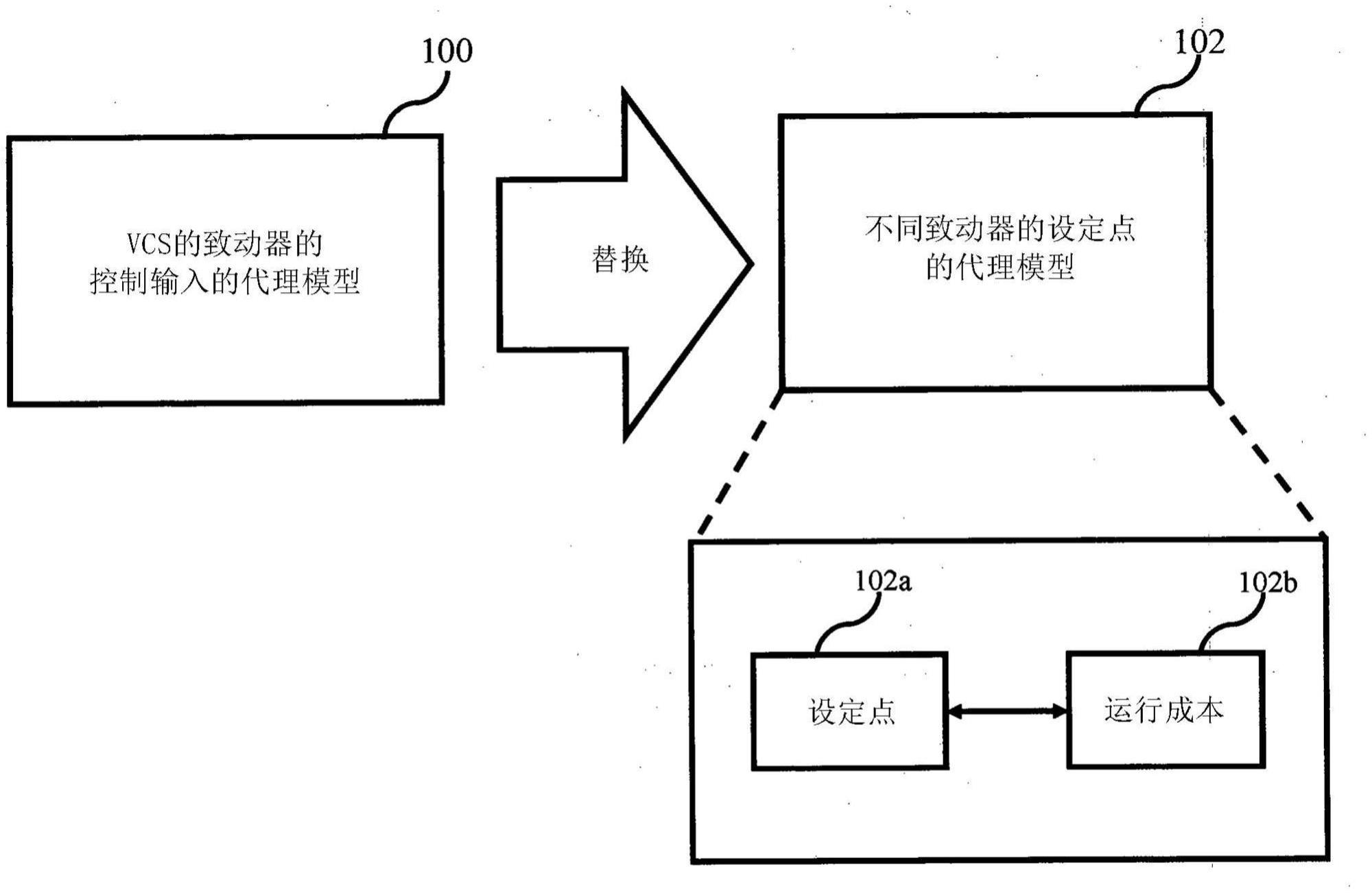
代理模型替换为vcs控制需要实现和/或跟踪的不同致动器的设定点的代理模型。以这样的方式,vcs的控制的优化与实际控制分离,这允许设定点的采样空间而不危及vcs的不同致动器的连续控制。
15.代理模型提供针对vcs的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的映射。如本文所使用的,“设定点”指的是vcs的变量的所希望值。术语设定点适用于热力学和环境参数、以及控制信号的特定组合的任何特定值。例如,术语“设定点”可以指示vcs的组件的一个或多个特定状态。vcs的不同致动器可以包括控制vcs的膨胀阀的位置的致动器、vcs的室内风扇、vcs的室外风扇、阻尼致动器等中的一个或更多个。根据实施方式,与设定点的组合相对应的运行成本是根据设定点的组合运行的vcs的功耗。此外,可以将代理模型102用于控制vcs的运行。
16.一些实施方式基于这样的认识,即,可以将诸如梯度下降的各种搜索技术用于代理模型以选择设定点的最优组合,从而降低vcs的运行成本。然而,由于vcs的缓慢动力学响应,导致所述控制与实际vcs控制的分离产生另一问题。例如,代理模型需要将设定点映射至在vcs的稳态下该vcs运行的成本。然而,vcs达到与设定点相对应的稳态需要时间(例如,15分钟)。而且,当设定点优化和控制分离时,需要使用附加的反馈控制器来将致动器的状态迭代地改变至它们的设定点,并且在那之后需要附加的时间来稳定vcs输出。
17.因此,设定点优化与实际vcs控制的分离产生内部问题:(1)如何在不等待vcs运行的稳态的情况下估计暂态时间中vcs运行的成本,以及(2)如何减少为构造代理模型所需的对应运行成本以及设定点的组合对的样本数。
18.一些实施方式通过使用设定点的组合的贝叶斯优化及其对应的估计运行成本来构造概率代理模型,从而解决这些内部问题。概率代理模型提供针对vcs的不同致动器的设定点的各种组合与关于对应运行成本的概率分布之间的映射。代理模型对应于概率代理模型。代理模型的概率性质包括不确定性,该不确定性可以被用于(1)不等待vcs运行的稳态来估计vcs运行的成本,因为暂态测量包括可以被并入概率代理模型中的不确定性,以及(2)考虑到这种不确定性来引导代理模型构造过程,以减少为构建代理模型所需的样本数。
19.根据实施方式,可以使用概率机器学习算法(诸如高斯过程回归)来构造概率代理模型,该概率机器学习算法将设定点的组合与关于对应的估计运行成本的概率分布映射,使得概率代理模型在概率映射中限定运行成本的至少前两个阶矩。在实施方式中,所述至少前两个阶矩可以包括运行成本的均值和运行成本的方差(也被称为置信度范围)。例如,对于设定点的给定组合,代理模型不仅提供功耗预测,而且提供以预测功耗为中心的置信度范围(例如,功耗预测是1000w,并且预测功耗的95%置信度范围将处于960w与1040w之间)。
20.此外,一些实施方式旨在选择下一次必须查询的设定点(也被称为“数据点”)的组合。如本文所使用的,查询设定点(或数据点)的组合指的是利用设定点的组合来评估目标(例如,根据设定点的组合来运行该蒸汽压缩系统)。一些实施方式使用运行成本的前两个阶矩的获取函数来选择设定点的组合以进行下一次查询。
21.获取函数使用由代理模型提供的概率映射来选择设定点的组合以进行下一次查询。因此,将获取函数用作确定下一次采样/查询的数据点的指南。在实施方式中,最大化获取函数,以选择具有作为代理模型的全局最小值的最大似然的设定点的最优组合,用于查
询和优化vcs的运行。这种代理模型构造和代理模型利用是贝叶斯优化的部分。换句话说,贝叶斯优化包括:使用用于提供概率映射的高斯过程回归的代理模型,以及利用由代理模型提供的概率映射来定向对结果设定点的查询的获取函数。
22.将所选择的设定点的最优组合应用至与vcs相关联的反馈控制器。反馈控制器被配置为确定与所选择的设定点的最优组合相对应的控制命令。此外,反馈控制器基于控制命令来控制vcs的运行,以根据所选择的设定点的最优组合来改变vcs的致动器的状态。反馈控制器是pi控制器、pid控制器、mpc控制器、或鲁棒控制器中的一者或其组合。
23.此外,蒸汽压缩系统产生所选择的设定点的最优组合的性能输出(例如,功耗)。此外,使用所选择的设定点的最优组合和对应的性能输出以利用贝叶斯优化来对代理模型进行更新。因而,获得经更新的代理模型。此外,将相同的获取函数应用至更新代理模型以选择用于控制vcs的新的设定点的最优组合以及对代理模型的更新。以类似的方式,在每次迭代中对代理模型进行更新。使这种迭代过程在线(即,在蒸汽压缩系统的实时运行期间)执行,直到满足终止条件。终止条件可以是迭代次数。迭代次数可以是任意的或者由用户定义。代理模型的迭代升级产生准确的代理模型。由于在每次迭代中,代理模型被更新并且相应地与获取函数结合使用以确定最优设定点,因此与获取函数组合的代理模型充当设定点优化器。
24.一些实施方式基于这样的认识,即,对于包括多个最小值的非凸函数,如果esc在包括局部最小值的区域中启动,那么esc可以仅确定局部最小值而不确定全局最小值。
25.一些实施方式基于这样的认识,即,对于非凸函数,确定全局最小值涉及标识良好的初始猜测,即,在函数是局部凸的并且包括全局最小值的区域中启动esc。此外,在该区域内使用梯度估计来标识全局最小值。在没有良好的初始猜测的情况下,基于梯度的算法可能收敛缓慢,并且可能陷入局部最小值。
26.一些实施方式基于这样的实现,即,可以将代理模型用于在最可能包含全局最小值的区域中启动esc。特别地,可以公式制定使用代理模型的贝叶斯优化(bo)框架,以在最可能包含全局最小值的区域中启动esc。可以随后将由bo框架获得的解用作用于经adam加速的极值搜索控制的初始猜测,该经adam加速的极值搜索控制可以被用于获得全局最小值。
27.一些实施方式基于这样的认识,即,当以分析形式的运行成本的函数可用时,可以容易地计算由极值搜索控制器使用的运行成本的梯度,以调谐所选择的设定点的最优组合。然而,为了控制vcs,这种分析函数通常是不可用的。然而,一些实施方式基于这样的实现,即,可以将概率代理模型用于代替这样的分析函数,以基于针对经调谐的设定点的组合的运行成本的连续估计,来计算运行成本的梯度。具体地,一个实施方式涉及直接相对于各个设定点来取高斯过程的核矩阵的梯度。以这样的方式,将概率代理模型用于热启动esc和控制esc二者。
28.基于代理建模的优化(诸如经贝叶斯优化热启动的esc)产生决定性的优点。例如,机器学习方法使得能够例如经由高斯过程回归,来构造蒸汽压缩系统的输入到性能输出的代理模型,而不管测量中的噪声。然而,无模型方法(诸如esc)直接根据噪声数据来估计梯度,而这可能导致不希望的影响,诸如在最优输入的邻域中的振荡甚或发散。代理建模还在实现可以被存储在例如云上的终止标准时学习输入-输出模型以便在后续运行中获得输入
的良好初始猜测(热启动)达到顶点。另外,收敛速率经由平滑回归器随着代理建模而提高,这是因为诸如一阶方法和二阶方法的平滑优化方法可以被直接用于代理模型。
29.因此,一个实施方式公开了一种用于控制蒸汽压缩系统(vcs)的运行的控制器。该控制器包括:至少一个处理器;以及存储器,该存储器上存储有指令,该指令在由所述至少一个处理器执行时使该控制器:以针对vcs的不同致动器的设定点的不同组合来控制该vcs的运行,以针对设定点的不同组合中的各个组合来估计该vcs的运行成本;使用设定点的组合的贝叶斯优化以及它们对应的估计运行成本,来计算概率代理模型,该概率代理模型提供针对vcs的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的概率映射,其中,该概率代理模型在概率映射中限定运行成本的至少前两个阶矩;根据运行成本的前两个阶矩的获取函数,来选择设定点的最优组合,设定点的最优组合具有作为代理模型处的全局最小值的最大似然;以及将所选择的设定点的最优组合提交给反馈控制器,以根据vcs的致动器在所选择的最优组合中的对应设定点,来改变致动器的状态。
30.另一实施方式公开了一种用于控制蒸汽压缩系统(vcs)的运行的方法。所述方法包括以下步骤:以针对vcs的不同致动器的设定点的不同组合来控制该vcs的运行,以针对设定点的不同组合中的各个组合来估计该vcs的运行成本;使用设定点的组合的贝叶斯优化以及它们对应的估计运行成本,来计算概率代理模型,该概率代理模型提供针对vcs的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的概率映射,其中,该概率代理模型在概率映射中限定运行成本的至少前两个阶矩;根据运行成本的前两个阶矩的获取函数,来选择设定点的最优组合,设定点的最优组合具有作为代理模型处的全局最小值的最大似然;以及将所选择的设定点的最优组合提交给反馈控制器,以根据vcs的致动器在所选择的最优组合中的对应设定点,来改变致动器的状态。
31.又一实施方式公开了一种非暂时性计算机可读存储介质,所述非暂时性计算机可读存储介质上具体实施有程序,所述程序能够由处理器执行以用于执行对蒸汽压缩系统(vcs)的运行进行控制的方法。所述方法包括以下步骤:以针对vcs的不同致动器的设定点的不同组合来控制该vcs的运行,以针对设定点的不同组合中的各个组合来估计该vcs的运行成本;使用设定点的组合的贝叶斯优化以及它们对应的估计运行成本,来计算概率代理模型,该概率代理模型提供针对vcs的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的概率映射,其中,该概率代理模型在概率映射中限定运行成本的至少前两个阶矩;根据运行成本的前两个阶矩的获取函数,来选择设定点的最优组合,设定点的最优组合具有作为代理模型处的全局最小值的最大似然;以及将所选择的设定点的最优组合提交给反馈控制器,以根据vcs的致动器在所选择的最优组合中的对应设定点,来改变致动器的状态。
附图说明
32.图1a示出了由用于蒸汽压缩系统的控制分离的一些实施方式所采用的原理的示意图。
33.图1b示出了由用于控制蒸汽压缩系统的运行的一些实施方式所采用的原理的示意图。
34.图1c例示了根据一些实施方式的由代理模型提供的均值预测和置信度范围。
35.图1d示出了根据一些实施方式的获取函数的曲线。
36.图2示出了根据一些实施方式的用于控制蒸汽压缩系统的运行的控制装置的框图。
37.图3示出了根据一些实施方式的用于确定代理模型的高斯过程的框图。
38.图4示出了根据一些实施方式的用于选择下一次查询的数据点的框图。
39.图5示出了根据一些实施方式的使用adam算法原理的时变极值搜索控制器(tv-esc)的示意图。
40.图6例示了根据一些实施方式的基于梯度数据的均值和标准偏差的步长的自适应。
41.图7a示出了根据一些实施方式的示例性凸函数。
42.图7b示出了根据一些实施方式的示例性非凸函数。
43.图8示出了根据一些实施方式的经贝叶斯优化热启动的esc的流程图。
44.图9a示出了根据一些实施方式的多区域蒸汽压缩系统(mz-vcs)的框图。
45.图9b示出了根据一些实施方式的多区域蒸汽压缩系统(mz-vcs)的框图。
46.图10示出了根据一些实施方式的标准时变esc、经adam加速的时变esc、以及经贝叶斯优化热启动的esc的性能结果。
47.图11例示了根据一些实施方式的用于复杂系统的经贝叶斯优化热启动的esc和标准时变esc的性能结果。
48.图12例示了根据一些实施方式的使用控制器控制加热、通风、以及空气调节(hvac系统)。
具体实施方式
49.在下面的描述中,出于解释的目的,阐述了许多具体细节,以便提供对本公开的详尽理解。然而,本领域技术人员应当明白,本公开可以在不需要这些具体细节的情况下来具体实践。在其它情况下,设备和方法仅以框图形式示出,以避免使本公开不清楚。
50.如在本说明书和权利要求中所使用的,当术语“举例来说”、“例如”和“诸如”以及动词“包括”、“具有”、“包含”和它们的其它动词形式与一个或更多个组件或其它项目的列表结合使用时,这些术语被解释为开放式的,意味着该列表不被认为排除其它附加的组件或项目。术语“基于”意指至少部分基于。此外,要理解,除非被具体限定为限制,否则本文所采用的用语和术语是出于描述的目的,而不应被视为进行限制。在该说明书中利用的任何标题仅仅是为了方便,而没有法律或限制性作用。
51.图1a示出了由用于蒸汽压缩系统的控制分离的一些实施方式所采用的原理的示意图。诸如热泵、制冷和空调系统之类的蒸汽压缩系统(vcs)在工业和住宅应用中被广泛使用。用于蒸汽压缩循环的变速压缩机、可变位置阀、以及变速风扇的引入提高了vcs的运行灵活性。具体地,到vcs的递送特定量的热的控制输入的组合通常不是唯一的,并且控制输入的不同组合可以具有不同的运行成本。例如,根据控制vcs的致动器的状态的控制输入的两种不同组合而运行的vcs可以递送相同的热容量,但是可以消耗不同量的能量。因此,希望使用例如最小化能耗和/或最大化vcs的能量效率的优化运行成本的控制输入组合来运行vcs。
52.致力于vcs的能量效率的控制方法可以分成两类:基于模型的控制方法和数据驱动的控制方法。基于模型的方法尝试描述vcs的控制输入对vcs的热力学行为和能耗的影响。在这种基于模型的方法中,使用现有的分析模型来预测满足热负载要求并最小化能耗的控制输入的组合。然而,vcs的用于不同配置的分析模型难以随时间导出、校准、以及更新。例如,对于至少包括与布置在一个或更多个室内区域中的多个热交换器连接的单个压缩机的多区域蒸汽压缩系统(mz-vcs),难以公式制定分析模型。换句话说,mz-vcs的复杂性可以阻止对应分析模型的使用。
53.在缺少动力学系统(诸如vcs)的准确模型的情况下,一些控制方法利用由动力学系统实时生成的运行数据,以便构造使动力学系统的动力学稳定化的控制策略。使用运行数据来设计控制策略被称为数据驱动控制。存在两种数据驱动控制方法:间接方法和直接方法。间接方法包括构造动力学系统的代理模型以及利用代理模型来设计控制器。直接方法包括在没有中间模型构建步骤的情况下基于运行数据来直接构造控制策略。间接方法的缺点是在模型构建阶段潜在需要大量的数据。相反地,直接方法需要较少的数据,但是即使是前沿直接控制方法也在处理状态和输入约束方面经历困难,而所述状态和输入约束对于在诸如vcs之类的闭环控制系统中维持安全运行是必不可少的。
54.为此,一些实施方式的目的是,提供一种用于vcs的闭环控制的间接数据驱动控制方法。这种闭环控制方法可能不会遭受基于模型的控制方法的复杂性以及直接数据驱动控制方法的不稳定性。然而,为了提供这样的间接数据驱动控制,需要生成可以高效地管理vcs的运行的代理模型。
55.一些实施方式基于这样的实现,即,在构造用于控制vcs的这种代理模型中存在若干障碍。例如,为了构造代理模型,存在针对vcs的致动器的控制输入的值的、需要被探索的大且实际上无限的连续空间。为了解决该问题,一些实施方式将vcs的致动器的控制输入的代理模型110替换为vcs控制需要实现和/或跟踪的不同致动器的设定点的代理模型102。以这样的方式,vcs的控制的优化与实际控制分离,这允许了设定点的采样空间而不危及vcs的不同致动器的连续控制。
56.代理模型102提供针对vcs的不同致动器的设定点102a的各种组合与vcs的致动器的对应运行成本102b之间的映射。如本文所使用的,“设定点”指的是vcs的变量的希望值。术语设定点应用于热力学和环境参数以及控制信号的特定组合的任何特定值。例如,术语“设定点”可以指示vcs的组件的一个或多个特定状态。vcs的不同致动器可以包括控制vcs的膨胀阀位置的致动器、vcs的室内风扇、vcs的室外风扇、阻尼致动器等中的一个或更多个。根据实施方式,与设定点的组合相对应的运行成本是根据设定点的组合运行的vcs的功耗。此外,可以使用代理模型102控制vcs的运行。
57.图1b示出了由用于使用代理模型102来控制蒸汽压缩系统110(vcs)的运行的一些实施方式所采用的原理的示意图。一些实施方式基于这样的认识,即,可以将诸如梯度下降之类的各种搜索技术用于代理模型102以选择设定点的最优组合,从而降低vcs110的运行成本。然而,由于vcs110的缓慢动力学响应,导致所述控制与实际vcs控制的分离产生另一问题。例如,代理模型102需要将设定点映射至在vcs的稳态下该vcs运行的成本。然而,vcs110达到与设定点相对应的稳态需要时间(例如,15分钟)。而且,当设定点优化和控制分离时,需要使用附加的反馈控制器来将致动器的状态迭代地改变至它们的设定点,并且在
那之后需要附加的时间来稳定vcs输出。
58.因此,设定点优化与实际vcs控制的分离产生内部问题,即,在等待vcs运行的稳态时消耗大量时间,并且需要设定点的组合对的大样本数和对应运行成本来构造代理模型102。为此,一些实施方式的目的是,在不等待vcs运行的稳态的情况下估计暂态时间中vcs运行的成本,并且也减少了构造代理模型102所需的样本数。
59.根据实施方式,可以通过使用设定点的组合的贝叶斯优化及其对应的估计运行成本来构造概率代理模型,从而实现这样的目的。概率代理模型提供针对vcs110的不同致动器的设定点的各种组合与关于对应运行成本的概率分布之间的映射。代理模型102对应于概率代理模型。代理模型102的概率性质包括不确定性,该不确定性可以被用于(1)不等待vcs运行的稳态来估计vcs运行的成本,因为暂态测量包括可以被并入概率代理模型的不确定性,以及(2)考虑到这种不确定性来引导代理模型构造过程,以减少为构建代理模型102所需的样本数。
60.在实施方式中,在vcs110根据设定点的组合而运行达到使vcs110未足以到达稳态的预定时间(例如,5分钟)之后,估计针对设定点的组合的运行成本。在一些实施方式中,至少一些运行成本是在根据设定点的对应组合运行的vcs110的暂态期间估计的。
61.根据实施方式,可以使用概率机器学习算法(诸如高斯过程回归)来构造概率代理模型,该概率机器学习算法将设定点的组合与关于对应的估计运行成本的概率分布映射,使得概率代理模型在概率映射中限定运行成本的至少前两个阶矩。在实施方式中,所述至少前两个阶矩可以包括运行成本的均值和运行成本的方差(也被称为置信度范围)。例如,对于设定点的给定组合,代理模型102不仅提供功耗预测,而且提供以预测功耗为中心的置信度范围(例如,功耗预测是1000w,并且预测功耗的95%置信度范围将处于960w与1040w之间)。
62.图1c例示了根据一些实施方式的由代理模型102提供的均值预测和置信度范围。点120表示样本/观察结果。曲线116表示均值预测,阴影区域118表示置信度范围。
63.此外,一些实施方式旨在选择下一次必须查询的设定点(也被称为“数据点”)的组合。如本文所使用的,查询设定点(或数据点)的组合指的是利用设定点的组合来评估目标(例如,根据设定点的组合来运行该蒸汽压缩系统110)。一些实施方式使用运行成本的前两个阶矩的获取函数104来选择设定点的组合以进行下一次查询。
64.图1d示出了根据一些实施方式的获取函数104的曲线124。获取函数104使用由代理模型102提供的概率映射来选择设定点(即,数据点)的组合以进行下一次查询。例如,如果在第一数据点(其之前未被查询),代理模型102得出功耗在85%置信度范围内可以是至少900w,而在第二数据点(其之前也未被查询),代理模型102得出功耗在95%置信度范围内可以是至少990w,那么即使第一数据点具有低置信度范围,也需要在查询第二数据点之前查询第一数据点,这是因为900w更可能是蒸汽压缩系统110的最优功耗。因此,将获取函数104用作确定下一次采样/查询的数据点的指南。
65.在实施方式中,最大化获取函数104,以选择具有作为代理模型102的全局最小值122的最大似然的设定点106的最优组合,以用于查询和优化vcs110的运行。这种代理模型构造和代理模型利用是贝叶斯优化114的部分。换句话说,贝叶斯优化114包括:使用用于提供概率映射的高斯过程回归的代理模型102、以及利用由代理模型102提供的概率映射来定
向对结果设定点的查询的获取函数104。
66.将所选择的设定点106的最优组合应用至与vcs110相关联的反馈控制器108。反馈控制器108被配置为确定与所选择的设定点106的最优组合相对应的控制命令。此外,反馈控制器108基于控制命令来控制vcs110的运行,以根据所选择的设定点106的最优组合来改变vcs110的致动器的状态。具体地,在实施方式中,反馈控制器108测量vcs110的输出(或过程变量)。将测得的值作为反馈信号130应用至反馈控制器108。反馈控制器108将误差信号计算为所选择的设定点106的最优组合与反馈信号130之间的差值。反馈控制器108使用诸如比例增益、积分项、和/或导数项之类的控制参数。可以将控制参数应用至误差信号以确定vcs110的输入,从而根据所选择的设定点106的最优组合来驱动过程变量或vcs输出。反馈控制器110是pi控制器、pid控制器、mpc控制器、或鲁棒控制器中的一者或其组合。
67.此外,蒸汽压缩系统110产生所选择的设定点106的最优组合的性能输出112(例如,功耗)。此外,使用所选择的设定点106的最优组合和对应的性能输出112以利用贝叶斯优化来对代理模型102进行更新。因而,获得经更新的代理模型。此外,将相同的获取函数104应用至更新代理模型,以选择用于控制vcs110的新的设定点的最优组合以及对代理模型120的更新。以类似的方式,在每次迭代中对代理模型102进行更新。使这种迭代过程在线(即,在蒸汽压缩系统110的实时运行期间)执行,直到满足终止条件。终止条件可以是迭代次数。迭代次数可以是任意的或者由用户定义。
68.代理模型的迭代升级产生准确的代理模型102。由于在每次迭代中,代理模型102被更新并且相应地与获取函数104结合使用以确定最优设定点,因此与获取函数104组合的代理模型102充当设定点优化器。
69.图2示出了根据一些实施方式的用于控制蒸汽压缩系统110的运行的控制装置200的框图。控制装置200可以具有连接控制装置200与其它系统和装置的多个接口。例如,网络接口控制器(nic)214适于通过总线212将控制装置200连接至网络216。通过网络216,无线地或者有线地,控制装置200可以接收指示室内风扇的速度、室外风扇的速度、膨胀阀的位置、压缩机的速度、蒸汽压缩系统110的性能输出112等中的一个或更多个的传感器测量218。另外或者另选地,可以经由输入接口202来接收传感器测量218。控制装置200可以基于传感器测量来监测蒸汽压缩系统110的组件的运行。
70.控制装置200包括被配置为执行所存储的指令的处理器204、以及存储可由处理器204执行的指令的存储器206。处理器204可以是单核处理器、多核处理器、计算集群、或者任何数量的其它配置。存储器206可以包括随机存取存储器(ram)、只读存储器(rom)、闪速存储器、或者任何其它合适的存储器系统。处理器204通过总线212连接至一个或更多个输入和输出装置。此外,控制装置200包括适于存储不同模块的存储装置208,所述不同模块存储用于处理器204的可执行指令。存储装置208可以使用硬盘驱动器、光学驱动器、拇指驱动器、驱动器阵列、或其任何组合来实现。
71.存储装置208被配置为存储代理模型102,该代理模型提供针对vcs的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的概率映射。存储装置208被配置为存储获取函数104。获取函数104被用于选择蒸汽压缩系统110的运行的不同参数的组合以进行下一次查询/采样。在一些实施方式中,使用获取函数104来选择具有作为代理模型的全局最小值的最大似然的设定点的最优组合。
72.在一些实施方式中,处理器204被配置为以针对vcs110的不同致动器的设定点的不同组合来控制vcs110的运行,以估计vcs110的运行成本或设定点的不同组合中的各个组合;以及使用设定点的组合的贝叶斯优化以及它们对应的估计运行成本,来计算概率代理模型,该概率代理模型提供针对vcs110的不同致动器的设定点的各种组合与vcs的致动器的对应运行成本之间的概率映射,其中,该概率代理模型在概率映射中限定运行成本的至少前两个阶矩。处理器204还被配置为根据运行成本的前两个阶矩的获取函数104,来选择设定点的最优组合,该设定点的最优组合具有作为代理模型处的全局最小值的最大似然。处理器204还被配置为经由输出接口220,将所选择的设定点的最优组合提交给反馈控制器108,以根据vcs110的致动器在所选择的最优组合中的对应设定点,来改变该致动器的状态。反馈控制器108是pi控制器、pid控制器、mpc控制器、或鲁棒控制器中的一者或其组合。
73.在实施方式中,处理器204还被配置为估计针对所选择的设定点106的最优组合的运行成本,并且使用所选择的设定点的最优组合以及对应的估计运行成本,来利用贝叶斯优化对代理模型102进行更新。在一些实施方式中,处理器204还被配置为根据向经更新的代理模型102应用的获取函数,来以最近选择的设定点的最优组合递归地对该代理模型102进行更新,直到满足终止条件。
74.图3示出了根据一些实施方式的用于确定代理模型102的高斯过程的框图。根据实施方式,将高斯过程用于定义函数上的先验分布。假设待优化的稳态功率成本函数j是根据这样的先验分布来生成的,其特征在于,零均值和核化协方差函数核化协方差函数负责定义函数j的诸如平滑度、对附加噪声的鲁棒性等的特征。一些实施方式基于这样的认识,即,使用matern 3/2函数是有益的,这是因为matern 3/2函数提供了稳态功率函数的良好近似而没有过平滑。
75.在框302处,获得数据样本。为此,用户可以选择膨胀阀位置(例如,150计数)、室内单元风扇的速度(例如,300rpm)、以及室外单元风扇的速度(例如,750rpm)。此外,蒸汽压缩系统110根据蒸汽压缩系统110参数的选定值运行几分钟(例如,5分钟)以计算稳态功耗。给定一组参数(150计数、300rpm、以及750rpm),这样的过程构成从蒸汽压缩系统110获得数据样本。例如,获得五个这样的数据样本(以每次评估5分钟)。使n
θ
表示数据样本的数量。数据样本由下式来表示:
[0076][0077]
其中,v是测量通道中的具有零均值和未知协方差的加性白噪声。
[0078]
在框304处,对于预决定的内核,给定一组超参数300l和σ0,将矩阵kd(θ)和计算为
[0079][0080]
以及
[0081][0082]
在框306处,基于所计算的矩阵kd(θ)和计算由均值函数μ(θ)和方差函数σ2(θ)表征的后验分布。均值函数μ(θ)和方差函数σ2(θ)由下式给出:
[0083][0084][0085]
根据实施方式,均值函数μ(θ)和方差函数σ2(θ)定义代理模型102。从式(1)和(2)可以注意到,后验分布取决于内核和诸如l、σ0、以及σn的一组超参数300的选择。
[0086]
在实施方式中,通过最大化对数边缘似然函数来确定该组超参数300。
[0087][0088]
其中,和ξ=j(θ) v。可以使用准牛顿方法来求解由式(3)给出的问题。在另选实施方式中,可以使用自适应梯度方法来解决由式(3)给出的问题。
[0089]
另选地,在一些实施方式中,可以通过神经过程回归或贝叶斯神经网络和/或机器学习的其它变体来确定代理模型102。
[0090]
图4示出了根据一些实施方式的用于选择下一次查询的数据点(即,参数的组合)的框图。获取函数104使用代理模型102来计算必须被查询的数据点。必须被查询的数据点由下式给出:
[0091][0092]
由于式(4)取决于高斯过程近似函数而不取决于实际函数j,因此获取函数的最大化涉及计算而不是昂贵的函数评估。在实施方式中,获取函数是期望改进(ei)获取函数。ei获取函数由下式给出:
[0093][0094]
其中,φ是零均值单方差正态分布的密度函数,φ是累积分布函数,以及
[0095][0096]
其中,j
best
是迄今为止利用数据样本测得的最低稳态功率。
[0097]
根据实施方式,执行ei获取函数(5)的最大化以计算待查询的数据点。在框400处,生成参数的容许搜索空间(θ)上的一组随机样本。
[0098]
此外,在框402处,为各个样本计算ei获取函数
[0099]
在框404处,执行各个随机样本的ei获取函数的最大化。在框406处,选择样本最大值作为待查询的数据点。
[0100]
为此,获取函数(例如,对于式(5))提供数据点以进行查询。在以所选择的数据点进行查询之后,获得对应的稳态功率。一些实施方式基于这样的认识,即,可以将从获取函数确定的数据点用于对代理模型102进行更新/重新训练,以增加代理模型102的准确度。特别地,利用使用获取函数选择的数据样本和数据点,来重新计算该组超参数。
[0101]
类似地,在下一次迭代中,利用经更新/重新训练的代理模型102,可以将获取函数(例如,对于式(5))用于选择待查询的另一数据点。此外,可以将所选择的其它数据点用于再次对经更新/重新训练的代理模型102进行更新/重新训练。执行对代理模型102进行更新的这种迭代直到满足终止条件。在适当次数的迭代之后,代理模型102学习基础函数j。
[0102]
另选地,在一些实现中,可以使用改进的概率获取函数或置信上限获取函数来选择下一次要查询的数据点。
[0103]
基于梯度估计的步长调整
[0104]
根据实施方式,闭环蒸汽压缩系统(诸如蒸汽压缩系统110)可以通过动力学来建模
[0105]
x
t 1
=f(x
t
,θ
t
),
[0106]
其中,t表示时间索引,表示蒸汽压缩系统的状态,以及θ∈θ表示设定点的向量,该向量可以被设计成将蒸汽压缩系统驱动至平衡,在该平衡处所测得的稳态功率输出
[0107][0108]
达到其最小值。例如,θ可以是电子致动阀的位置、或风扇速度、及其组合。假设函数j在容许搜索空间θ的一组参数上是凸的,并且允许最优。即,对于每一个θ∈θ,存在θ
★
∈θ,使得并且存在χ>0,使得这里,表示已知的容许的一组参数;例如,风扇速度的范围。假设非线性f是两次连续可微分的,但不要求是已知的。所测得的稳态功率输出表示该蒸汽压缩系统的稳态功率输出,并且π
∞
(
·
)是从设定点到平衡状态的映射;即,f(π
∞
(θ),θ)=0。一些实施方式的目的是驱动θ
t
→
θ
★
(最优设定点)。
[0109]
一些实施方式基于这样的认识,即,诸如adam、随机梯度下降、自适应梯度(adagrad)、以及rmsprop的自适应梯度算法不仅利用梯度,而且利用导致对梯度的鲁棒估计的对应统计。而且,自适应梯度算法包括基于动量的机制来快速标识步长以提高收敛速度。自适应梯度算法通常被用于训练神经网络。然而,一些实施方式基于这样的实现,即,可以将自适应梯度算法用于极值搜索控制(esc),以基于函数j在局部邻域中的平滑度来自动地适应步长。为此,一个实施方式旨在对极值搜索控制适用adam算法,来公式制定经adam加速的极值搜索控制。
[0110]
图5示出了根据一些实施方式的使用adam算法原理的时变极值搜索控制器(tv-esc)的示意图。处理器204执行tv-esc。tv-esc使从所选择的设定点106的最优组合开始的对反馈控制器108的输入扰动,以基于因扰动而造成的运行成本的梯度来调谐所选择的设定点的最优组合。tv-esc包括具有以下形式的基于梯度的控制器500:
[0111]
θ
t 1
=θ
t-kgg
t
d
t
,
[0112]
其中,g
t
是j(θ
t
)的梯度的估计,标量kg是控制增益或步长,以及d
t
是为确保激励持续所需的有界抖动信号512。
[0113]
一些实施方式基于这样的认识,即,当以分析形式的运行成本的函数可用时,可以容易地计算由极值搜索控制器使用的运行成本j(θ
t
)的梯度g
t
,以调谐所选择的设定点的最优组合。然而,为了控制vcs,这种分析函数通常是不可用的。然而,一些实施方式基于这样的实现,即,可以使用概率代理模型102代替这样的分析函数,以基于针对经调谐的设定点的组合的运行成本的连续估计,来计算运行成本的梯度g
t
。为此,在实施方式中,由处理器204使用延迟510以数据驱动的方式来生成梯度估计g
t
。具体地,一个实施方式涉及直接相对于各个设定点来取高斯过程的核矩阵的梯度。函数j中的增量504被给定为:
[0114]
δj
t
:=j(θ
t
)-j(θ
t-1
)
[0115]
连同递增设定点:
[0116]
δθ
t
:=θ
t-θ
t-1
。
[0117]
通过收集设定点的历史以及对应的稳态功率值并且求解以下线性方程,来以数据驱动的方式估计梯度
[0118][0119]
具体地,使用nd个数据点的历史来估计梯度。在实施方式中,将处理器204配置为通过根据获取函数104将所选择的设定点的最优组合的受扰动值映射至关于代理模型102的运行成本的值,来估计由扰动造成的运行成本j(θ
t
)的梯度g
t
。
[0120]
一些实施方式基于这样的认识,即,由于优化问题不是静态的,因此最近的数据点有效地贡献梯度。因此,实现递归滤波器506以估计梯度508,并且包括遗忘因子α∈(0,1),以将重要性指派给最近的数据点而不是过去的数据。递归滤波器506由下式来描述:
[0121][0122][0123][0124]gt
=g
t-1
k
tet
[0125]
并且以p-1
=α-1
i和g-1
=0进行初始化。
[0126]
根据一些实施方式,在用户定义的迭代次数之后将矩阵p
t
重置为p-1
提高了梯度估计器的数值稳定性。由于递归滤波器506需要由τ表示的老化时段(burn-in period)来生成有意义的梯度估计,因此在老化时段之后将梯度估计并入esc控制定律或设定点更新定律514的实现中,如下:
[0127][0128]
由于评估稳态功率需要通过运行昂贵且耗时的实验获得的数据,因此需要加速(在没有许多实验的情况下获得最低功率)esc。因为esc方法需要梯度的数值估计,所以这些估计通常是有噪声的,并且平均起来仅复制真实的梯度。因此,维持恒定步长kg可以导致闭环性能的降级,这是因为步长kg的小值可以导致缓慢收敛,而大值可以由于以最优值为中心的过冲而导致次优性。
[0129]
一些实施方式基于这样的实现,即,基于梯度数据历史来调整步长。使m
t
和v
t
表示使用最后n个梯度估计g
t-n 1
,...g
t
(也被称为梯度数据)计算的当前均值和标准偏差。基于当前均值m
t
和标准偏差v
t
,可以公式制定经加速的控制器。经加速的控制器具有以下形式:
[0130][0131]mt 1
=β1m
t
(1-β1)g
t
[0132]vt 1
=β2v
t
(1-β2)g
t
⊙gt
[0133]
其中,
[0134]
[0135]
其中,k
t
是有效步长,并且∈>0是确保v
t
∈>0的标量。
[0136]
图6例示了根据一些实施方式的基于比率的步长的自适应。在图6中,示出了待优化的成本函数的水平集600。星形602示出了优化器。对于轨迹604,所估计的梯度一致地处于具有小变化的相同方向上。因此,所估计的均值m
t
在迭代上类似,并且方差v
t
较小。结果,比率较大,并且允许控制器在下降方向上采取积极的步骤606。
[0137]
对于轨迹604,所估计的梯度是有噪声的,因此方差v
t
较大。因此,比率较小,这导致较小的步长以及沿下降方向的谨慎移动610。
[0138]
图7a示出了根据一些实施方式的示例性凸函数710。在凸函数700中,在域702中的任何地方启动esc确保可以获得最小值。图7b示出了根据一些实施方式的示例性非凸函数704。在包括多个最小值710a和710b的非凸函数704中,全局最小值的确定取决于esc启动于哪个域。例如,如果esc在域706中启动,则esc确定全局最小值,即,最小值710a。然而,如果esc在域708中启动,则esc可以仅确定最小值710b(即,局部最小值)而非全局最小值。
[0139]
一些实施方式基于这样的认识,即,如果函数j是非凸的,则确定全局最小值涉及标识良好的初始猜测,即,在函数是j局部凸的并且包括全局最小值的区域中启动esc。此外,在该区域内使用梯度估计来标识全局最小值。在没有良好的初始猜测的情况下,基于梯度的算法可能收敛缓慢,并且可能陷入局部最小值。
[0140]
一些实施方式基于这样的实现,即,可以使用代理模型102以在最可能包含全局最小值的区域(例如,区域706)中启动esc。特别地,一些实施方式基于这样的实现,即,代理模型102的概率性质及其估计受控vcs的暂态中的运行成本的能力可能无法在选择设定点的最优组合方面充分捕获vcs的动力学特性。为此,一些实施方式使用根据概率模型选择的设定点的最优组合,来以数据驱动的方式热启动探索vcs动力学特性的esc。有利地,esc可以以无模型方式优化控制输入。然而,esc可能花费几个小时来收敛至最优设定点。esc的这种缓慢收敛特性代表了对蒸汽压缩系统的性能的实时优化的j9九游会真人的解决方案的障碍,而该障碍可以通过根据不同实施方式的热启动来克服。
[0141]
图8示出了根据一些实施方式的经贝叶斯优化热启动的esc的流程图。经贝叶斯优化热启动的esc包括贝叶斯优化热启动机制以提供对esc的初始猜测。
[0142]
在步骤800,在设定点的容许空间中对设定点的初始集合进行采样800。设定点的初始集合以及随后的设定点和对应的稳态功率输出形成数据集。在步骤802,基于数据集来确定代理模型。在步骤804,使用获取函数来选择下一个最佳设定点。在一些实现中,所获得的下一个最佳设定点可以对应于具有作为代理模型的全局最小值的最大似然的参数的组合。图3和图4详细描述了步骤802和804。
[0143]
在步骤806,将所获得的下一个最佳设定点作为初始猜测应用至esc。
[0144]
多区域蒸汽压缩系统
[0145]
一些实施方式基于多区域蒸汽压缩系统(mz-vcs)在控制住宅和商业建筑方面的优点的评价。在实施方式中,vcs110可以对应于mz-vcs。mz-vcs至少包括单个压缩机,该单个压缩机与布置在一个或更多个室内区域中的多个热交换器连接。下面参照图9a和图9b详细描述mz-vcs。
[0146]
图9a和图9b示出了根据一些实施方式的多区域蒸汽压缩系统(mz-vcs)的框图。mz-vcs包括被配置为控制一组区域中的环境的一组热交换器和压缩机。对于每个区域,存在至少一个热交换器。例如,在图9a的一个实施方式中,各个区域925或935皆对应于建筑物中的房间,使得mz-vcs能够同时向多个区域提供冷却或加热。在图9b所示的另选实施方式中,将多个热交换器放置在建筑物中的一个房间或区域937中,使得mz-vcs能够向房间的不同部分提供冷却或加热。
[0147]
在本公开中,为了清楚起见,描述了两区域mz-vcs,但应理解,可以使用任何数量的区域,而这受到制冷剂管线长度、容量、压缩机的泵送功率、以及建筑规范的物理限制。如果区域是室内区域(诸如房间或房间的一部分),则热交换器是室内热交换器。
[0148]
压缩机910接收处于蒸汽状态的低压制冷剂并且执行机械功以增加制冷剂的压力和温度。根据四通阀909的配置,可以将高温制冷剂引导至室外热交换器(在该情况下,系统将热移动至外部环境并且提供有用的冷却,并且被称为以冷却模式运行),或者引导至室内热交换器(在该情况下,系统将热移动至一个或更多个室内区域并且提供有用的加热,并且被称为以加热模式运行)。
[0149]
为清楚起见并且为了简化随后的描述,通常考虑冷却模式,即,将压缩机连接至蒸汽压缩系统的其余部分,如四通阀909的实线所示,但是应理解,可以对在加热模式下运行的系统进行类似的陈述,其中,将冷凝器适当地替换为蒸发器,将冷凝温度替换为蒸发温度。
[0150]
在冷却模式下,高温、高压制冷剂移动至室外热交换器915,并且关联的可选风扇916将空气吹过室外热交换器915。使热从制冷剂传递至空气,从而使制冷剂从蒸汽冷凝成液体。
[0151]
在蒸汽压缩循环的理想描述中,其中蒸汽制冷剂从饱和蒸汽冷凝成液体和蒸汽二者的两相混合物再冷凝成饱和液体的相变过程是等温的,即,相变过程是在恒定温度下发生的,因此没有明显的温度变化。然而,如果从饱和液体中进一步去除热,则饱和液体的温度降低达适当的量,并且制冷剂被称为“过冷的”。过冷温度是过冷制冷剂与在相同压力下计算的饱和液体制冷剂温度之间的温度差。
[0152]
液态高温制冷剂离开室外热交换器915并且被集管917分流,以便在随后连接的室内区域925、935、或937之间分配制冷剂。将单独的膨胀阀926、936连接至入口集管。这些膨胀阀是限制元件,并且使制冷剂的压力显著降低。由于压力快速降低而在膨胀阀中没有显著的热交换,因此,制冷剂的温度显著降低,在蒸汽压缩循环的理想描述中被称为“绝热”。离开阀的最后所得到的制冷剂是液体和蒸汽的低压、低温两相混合物。
[0153]
两相制冷剂进入室内热交换器920、930,在室内热交换器处关联的风扇921和931分别将空气吹过热交换器920和930。表示来自室内空间的热负载的热922、932从区域传递至制冷剂,从而使制冷剂从液体和蒸汽的两相混合物蒸发成饱和蒸汽状态。
[0154]
其中制冷剂从饱和蒸汽蒸发成液体和蒸汽两者的两相混合物再蒸发成饱和蒸汽的相变过程在蒸汽压缩循环的理想描述中是等温的,即,在恒定温度下发生,因此是在温度没有明显变化的情况下发生的过程。然而,如果将进一步的热添加至饱和蒸汽,则饱和蒸汽的温度增加达适当的量,并且制冷剂被称为“过热的”。过热温度是过热制冷剂蒸汽与在相同压力下计算的饱和蒸汽温度之间的差值。
[0155]
离开室内单元热交换器的低压制冷剂蒸汽在出口集管918处重新连接至公共流动路径。最后,低压制冷剂蒸汽返回至压缩机910,并且该循环重复。
[0156]
mz-vcs中的主要致动器包括压缩机910、室外热交换器风扇916、室内热交换器风扇921、931、以及膨胀阀926、936。在一些系统中,压缩机速度可以固定至一个或更多个预定设定或者连续地改变。类似地,室外热交换器风扇916可以以固定速度运行或连续地改变速度。在一些配置中,室内热交换器风扇921、931可以由mz-vcs控制器确定,或者当居住者想要直接控制室内气流时,其速度可以由居住者来确定。膨胀阀由控制装置200来控制(例如,电子地控制),以从处于完全关闭位置到完全打开位置(包括所有可能的中间位置)连续地改变。一些mz-vcs实现将电子控制膨胀阀替换成用于开/关控制的电磁阀和用于精确流速控制的单独可变开度阀的串联组合。
[0157]
高制冷剂压力和低制冷剂压力由热力学条件来确定,诸如室外和室内空气温度、压缩机速度以及阀开度的联合组合。膨胀阀926和936中的各个膨胀阀皆可以被设定成不同的开度,但是总的高压和低压是由在制冷剂回路中并联设置的这些阀上的总压降来确定的。应注意,在室内热交换器920和930与出口集管918之间没有减压元件,因此所有热交换器在基本相同的压力下运行。而且,由于先前提及的相变的等温特性,导致所有的室内热交换器被限制在相同的温度下蒸发。
[0158]
根据实施方式,室内热交换器920和930的加热或冷却能力可以通过使各个热交换器在“开”和“关”的运行模式之间循环的占空比(duty)来调制。当控制制冷剂流的入口阀关闭时,热交换器920和930关闭,或者另选地,泵送制冷剂通过系统的压缩机910停止,以使热交换器920和930不执行冷却或加热。当入口阀打开并且压缩机910在运行时,热交换器920和930打开,以使室内区域925和935中的热交换器920和930以它们的全热容量运行。控制器基于室内区域温度与所希望的室内区域温度之间的差值来决定如何在模式之间交替。
[0159]
然而,已知将热交换器切换为开和关的动作(尤其是在mz-vcs中,其中区域热交换器可以彼此独立地切换为开和关,从而导致系统输出(诸如区域温度和热交换器温度)的持续变化)在能量上是低效的并且降低了居住者的舒适度。因此,需要一种控制系统和方法来平稳地控制热交换器(诸如mz-vcs的热交换器)的热容量。
[0160]
一些实施方式基于这样的认识,即,可以将概率代理模型102有利地用于降低控制mz-vcs的复杂度。具体地,在具有大量设定点的mz-vcs中,设定点的强力采样可以导致超额计算开销和长的调谐时间。通过使用贝叶斯优化算法极大地缩减了样本效率,该贝叶斯优化算法可以经由概率代理模型102来平衡探索和利用。根据一些实施方式,对于具有大量设定点的mz-vcs,需要可缩放的概率机器学习算法。在一些实施方式中,可缩放的概率机器学习算法可以基于贝叶斯深度神经网络或变分自动编码器。
[0161]
结果
[0162]
图10示出了根据一些实施方式的标准时变esc、经adam加速的时变esc、以及经贝叶斯优化热启动的esc的性能结果。为了评估性能,考虑包括具有反馈控制器的蒸汽压缩循环的系统。反馈控制器被配置为通过控制压缩机速度来将冷却能力调节至设定点。这样的系统有助于对蒸汽压缩循环的优化方法的研究,而不涉及被占用空间的较慢且低通的热动力学。此外,应用优化方法(诸如标准时变esc、经adam加速的时变esc、以及经贝叶斯优化热启动的esc)来调整系统的输入(诸如膨胀阀位置、室内风扇速度(ifs)、以及室外风扇速度
(ofs))以优化功耗。
[0163]
对于案例研究,选择pi回路以将蒸汽压缩循环的冷却能力调节至2kw,并且应用优化方法以确定膨胀阀位置和风扇速度的最优值。pi增益被离线(即,提前)调谐。pi增益对于设定点调谐机制是未知的。
[0164]
在功率曲线1000中,1002表示标准时变esc,1004表示经adam加速的时变esc,以及906表示经贝叶斯优化热启动的esc(混合)。从功率曲线1000可以注意到,与经贝叶斯优化热启动的esc 906相比,标准时变esc 1002和经adam加速de时变esc 1004表现出较慢的收敛。经贝叶斯优化热启动的esc 906在3小时内收敛至0.335kw的稳态循环功率,而其它算法需要超过10小时来接近最小循环功率。
[0165]
根据实施方式,稳态循环功率的差异是由标准时变esc 1002、经adam加速的时变esc 1004以及经贝叶斯优化热启动的esc 906确定的最优lev(线性膨胀阀)位置的差异而造成的。由于标准时变esc 1002和经adam加速的时变esc 1004依赖于初始lev位置,因此它们收敛至大约300计数的稳态lev位置。另一方面,经贝叶斯优化热启动的esc 906确定:260计数的稳态值产生明显更好的能量效率。因为经贝叶斯优化热启动的esc 906包括探索阶段,所以在该阶段结束时,bo热启动产生局部有效的一组调谐参数。然而,仍然存在可以在线利用的局部梯度信息,这导致在贝叶斯优化热启动之后进一步降低功耗。此外,从曲线1008和1010可以观察到,贯穿设定点调谐过程获得了容量设定点,但是与lev位置结合的压缩机频率逐渐降低至大约17hz,而不是如预期的那样维持40hz。
[0166]
图11例示了根据一些实施方式的用于复杂系统的经贝叶斯优化热启动的esc和标准时变esc的性能结果。该复杂系统包括与图10的描述中所描述的相同的循环,但是并入了两个反馈回路:其中一个反馈回路经由压缩机速度的控制将室温调节至设定点,而其中另一反馈回路经由膨胀阀位置的控制将蒸发器过热温度(cite)调节至设定点5℃。该复杂系统连接至容积为27m3和具有木材热特性的20cm厚的包层的立方体房间模型,并且外部和内部传热系数的值分别为1.5wm-2
和3.5wm-2
。该复杂系统根据在白天被占用而在夜晚未被占用的商业办公楼来运行。结果,将该空间中的显热和潜热负载在上午8点到下午6点之间设定为3200w和800w,其它时间设定为2000w和100w。假设环境温度在24小时时段内在24℃到40℃之间以正弦方式改变,并且峰值温度在下午2点。
[0167]
此外,考虑两个可调谐输入:室内风扇速度(ifs)和室外风扇速度(ofs)。假设两个可调输入都是有界的,并且边界是已知的,例如,ifs以[200,500]rpm为界,而ofs以[500,900]rpm为界。尽管标准的时变esc和经贝叶斯优化热启动的esc假设可以在当前时刻测量热负载,但是标准的时变esc和经贝叶斯优化热启动的esc没有先验地给出关于温度或热分布的信息。
[0168]
经贝叶斯优化热启动的esc使用前18小时来收集所述负载模式(即,当热负载高时,以及当热负载低时)中的各个负载模式的数据。对于各个负载模式,学习能量-效率的代理模型(例如,代理模型102)以及对应的最优ifs和ofs对。在18小时后,经adam加速的时变esc接管并且将基于梯度的更新用于ifs和ofs。从性能结果可以注意到,标准的时变esc表现出有限的灵活性。例如,ifs在290rpm至310rpm的窄范围内振荡,而ofs是停滞的。相反地,在经贝叶斯优化热启动的esc中,代理模型允许esc位置的快速复位,这进而导致改进的能量效率。而且,可以注意到,经贝叶斯优化热启动的esc导致数天的改进,例如,48小时后(约
60小时至70小时)功率的降低比24小时至48小时更显著。
[0169]
图12例示了根据一些实施方式的使用控制装置200控制加热、通风、以及空气调节(hvac系统)1210。“hvac”系统指的是实现蒸汽压缩循环的任何加热、通风、以及空气调节(hvac)系统。hvac系统1210跨越非常广泛的系统集合,范围从仅向建筑物的居住者供应室外空气的系统到仅控制建筑物的温度的系统、或者到控制温度和湿度的系统。
[0170]
将hvac系统1210设置到空调房间(condition room)1200。房间1200由居住者1202、1204、1206和1208占用。箭头1214表示由hvac系统1210向空调房间1200供应的空气。基于代理模型(例如,代理模型102),控制器(例如,控制装置200)确定使hvac系统1210的功耗最小化的设定点的最优组合。
[0171]
此外,将设定点的最优组合输入至与hvac系统1210相关联的反馈控制器1212。反馈控制器1212基于设定点的最优组合来生成控制命令。反馈控制器1212还根据控制命令来控制hvac系统1210,以使hvac系统1210的功耗最小化。
[0172]
基于代理建模的优化(诸如使用代理模型102的经贝叶斯优化热启动的esc)产生决定性的优点。例如,机器学习方法使得能够例如经由高斯过程回归,来构造蒸汽压缩系统的输入到性能输出的代理模型,而不管测量中的噪声。然而,无模型方法(诸如esc)直接根据噪声数据来估计梯度,而这可能导致不希望的影响,诸如在最优输入的邻域中的振荡甚或发散。代理建模还在实现可以被存储在例如云上的终止标准时学习输入-输出模型以便在后续运行中获得输入的良好初始猜测(热启动)达到顶点。另外,收敛速率经由平滑回归器随着代理建模而提高,这是因为诸如一阶方法和二阶方法的平滑优化方法可以被直接用于代理模型。
[0173]
以上描述仅提供了示例性实施方式,而非旨在对本公开的范围、适用性或配置进行限制。相反,示例性实施方式的以上描述将向本领域技术人员提供用于实现一个或更多个示例性实施方式的能够完成的描述。在不脱离所附权利要求中阐述的所公开主题的精神和范围的情况下,设想可以对元件的功能和布置进行各种改变。
[0174]
在以上描述中给出具体细节,以提供对实施方式的透彻理解。然而,本领域普通技术人员应当明白,可以在没有这些具体细节的情况下实践这些实施方式。例如,所公开主题中的系统、处理以及其它元件可以以框图形式示出为组件,以免不必要的细节模糊这些实施方式。在其它情况下,公知的处理、结构以及技术可以在没有不必要的细节的情况下被示出,以避免模糊这些实施方式。而且,各个附图中的相同标号和指定表示相同元件。
[0175]
而且,各个实施方式可以被描述为处理,该处理被描绘为流程图、程序框图、数据流图、结构图或框图。尽管流程图可以将操作描述为顺序处理,但许多操作可以并行或同时执行。另外,操作的次序可以重新排列。处理可以在其操作完成时终止,但是可以具有未讨论或者图中未包括的附加步骤。而且,并非任何特别描述的处理中的所有操作都可能发生在所有实施方式中。处理可以对应于方法、函数、过程、子例程、子程序等。当一个处理对应一个函数时,该函数的终止可以对应于该函数返回至调用函数或主函数。
[0176]
而且,所公开主题的实施方式可以至少部分地、人工地或者自动地实现。手动或自动实现可以通过使用机器、硬件、软件、固件、中间件、微代码、硬件描述语言,或任何其组合来执行或至少辅助。当以软件、固件、中间件或微代码实现时,执行必要任务的程序代码或代码段可以存储在机器可读介质中。处理器可以执行必要的任务。
[0177]
本文所概述的各种方法或过程可以被编码为可在采用多种操作系统或平台中的任一者的一个或更多个处理器上执行的软件。另外,这种软件可以使用多种合适的编程语言和/或编程或脚本工具中的任一者来进行编写,并且还可以被编译为在框架或虚拟机上执行的可执行机器语言代码或中间代码。通常,在各种实施方式中,可以根据需要组合或分布程序模块的功能。
[0178]
本公开的实施方式可以具体实施为已经提供了其示例的方法。作为该方法的一部分执行的动作可以按任何合适方式来安排。因此,即使在例示性实施方式中被示出为顺序动作,也可以构造按与所例示相比不同的次序来执行动作的实施方式,其可以包括同时执行一些动作。尽管本公开已经参照特定优选实施方式进行了描述,但要明白的是,可以在本公开的精神和范围内进行各种其它改变和修改。因此,所附权利要求书的方面覆盖落入本公开的真实精神和范围内的所有这种改变和修改。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!