一种前臂肌力训练与评估系统、方法-j9九游会真人
1.本发明属于肌力训练与评估系统技术领域,尤其涉及一种前臂肌力训练与评估系统、方法。
背景技术:
2.前臂肌力不平衡普遍存在于网球、羽毛球及乒乓球运动员当中,前臂肌力不平衡会导致关节失稳,引起肌肉代偿,增加运动损伤风险,造成关节失稳、关节炎甚至致残。
3.目前市面产品大多是针对手臂的肌力训练器具,如腕力器、握力器、臂力器等,存在着无法量化评估肌力及肌力平衡性、训练动作单一、训练模式固化等问题,握力计只有测量功能,且只能反映整体的前臂肌力水平,无法提供多维度的前臂训练和测量前臂的肌力平衡性,康复医院中的等速肌力仪虽然可以评估和训练前臂肌力,操作复杂且预约困难,体验不佳,需要康复治疗师辅助。
4.因此,需要一种简单的、易于操作且易于制造的前臂肌力训练和评估系统。
5.通过上述分析,现有技术存在的问题及缺陷为:
6.针对手臂的肌力训练器具一般都存在着无法量化评估肌力及肌力平衡性、训练动作单一、训练模式固化等问题,握力计只有测量功能,且只能反映整体的前臂肌力水平,无法提供多维度的前臂训练和测量前臂的肌力平衡性,康复医院中的等速肌力仪虽然可以评估和训练前臂肌力,操作复杂且预约困难,体验不佳,需要康复治疗师辅助。
技术实现要素:
7.针对现有技术存在的问题,本发明提供了一种前臂肌力训练与评估系统、方法。
8.本发明是这样实现的,一种前臂肌力训练与评估系统包括:
9.前臂肌力训练装置,包括阻力调节组件、把手和外壳,用于对前臂肌力进行训练;
10.前臂肌力评估系统,包括静态扭矩传感器、信号变送器、单片机、显示屏、按键、扬声器,静态扭矩传感器、信号变送器、显示屏、扬声器、按键与单片机电连接,用于对前臂肌力训练装置的数据进行采集,并对采集数据进行分析评估。
11.进一步,所述阻力调节组件包括机架、轴、轮、键、压块、摩擦片、第一轴承、第一轴承座、第二轴承、第二轴承座、旋钮螺柱。
12.进一步,所述把手包括第一把手和第二把手,所述第一把手固定在所述轴上,所述第二把手与所述轴一端固定连接。
13.进一步,所述轴两端设有孔槽,一端连接第二把手,另一端与所述静态扭矩传感器形成间隙配合,所述轴上设有键槽,所述键槽设置在所述第一轴承座与所述第一把手之间,所述键置于所述键槽中,所述轴通过所述键带动所述轮转动。
14.进一步,所述第一轴承座设置在所述键槽与所述静态扭矩传感器之间,所述第二轴承座设置在所述第一把手和所述第二把手之间,即所述第一轴承座、第二轴承座设置在所述轴的两端,所述第一轴承座与所述第二轴承座与所述机架连接。
15.进一步,所述第一把手与所述外壳之间设有第一挡圈和第二挡圈,且当所述第一把手右端与所述第二挡圈接触时,所述第一挡圈与第一把手左端的距离大于或等于所述轴与所述静态扭矩传感器连接端的孔槽深度。
16.进一步,所述外壳包括上盖、前壳、后壳、第二轴承座左罩壳、第二轴承座右罩壳、底壳,所述前壳顶部和后壳顶部与上盖相连接,底部与机架相连接,所述第二轴承座左罩壳、第二轴承座右罩壳、机架与底壳相连接。
17.进一步,所述上盖设有挡板和螺纹孔,所述挡板限制所述压块前后左右的位移,所述螺纹孔设置在所述压块中心正上方,所述压块与所述摩擦片固定连接,所述摩擦片与所述轮的轮缘相接触,所述旋钮螺柱穿过所述螺纹孔与所述压块相接触。
18.进一步,所述按键与所述显示屏固定在所述外壳表面,所述单片机、所述信号变送器与所述扬声器与所述外壳内壁固定连接,所述单片机将采集到的扭矩数据进行分析和处理并显示在所述显示屏上,所述显示屏用于查看正反转的峰值扭矩、实时扭矩、预设扭矩值、肌力平衡性以及历史测试数据,所述按键包括模式切换键、确认键、加键、减键,所述模式切换键用于在峰值模式、实时模式、预设模式间切换,所述确认键用于确认操作、数据保存以及查看历史记录,所述加键与减键用于数据的选择与数值调节。
19.本发明的另一目的在于提供一种前臂肌力训练与评估方法,所述前臂肌力训练与评估方法包括:
20.步骤一,将前臂肌力训练装置放置在桌面距离胸前一臂的距离,接通电源,调整座椅高度,使得前臂与桌面保持平行,点击模式切换按键,选择峰值模式,正反旋转把手测量正反转的峰值扭矩和肌力平衡性;
21.步骤二,前臂肌力评估方法:握住第一把手将轴向左平移至与静态扭矩传感器形成间隙配合,即切换为评估模式,通过自主最大用力正反转动第一把手用于测量腕屈伸的扭矩值以及肌力平衡性,相应的,正握第二把手用于测量尺偏、桡偏的肌力数据,侧握第二把手用于测量前臂旋前及旋后的肌力数据,所测数据显示在显示屏上,按下确认键保存数据,长按确认键查看历史测试数据,上下键用于选择历史记录,再次按下确认键删除数据,通过对比分析得到前臂肌力水平的变化,根据肌力平衡性比率可评估肌力发展水平、判断潜在的损伤风险;
22.步骤三,前臂肌力训练方法:握住第一把手将轴向右平移至与静态扭矩传感器分离,即切换为训练模式;训练腕屈、腕伸动作时,采用第一把手,训练尺偏、桡偏、旋前、旋后时,采用第二把手;根据肌力评估结果,通过增加组数、次数或阻力有针对性地增加训练弱侧肌肉的训练,根据数据反馈自行调整训练计划;
23.步骤四,训练两周后,再次对前臂肌力进行测量评估,通过查看与对比历史测量数据,了解自身前臂肌群力量水平与平衡性的变化。
24.结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
25.第一、本发明中的前臂肌力训练装置采用了双把手设计,实现了腕屈、腕伸、尺偏、桡偏、旋前、旋后六个方向的前臂训练动作,能够训练手部握力、腕部屈伸与前臂的旋转功能,且不会对手臂产生因压迫而造成的疼痛感。
26.本发明中的前臂肌力训练装置能够快速在肌力训练和肌力评估之间进行切换,弥
补了市面产品无法兼顾前臂肌力训练和评估的空白,有助于患者或运动员及时了解自身前臂肌肉的力量水平和肌力发展平衡性的状况,此外,还可根据数据反馈进行有针对性地调整训练计划,有助于提高前臂力量水平与关节稳定性,有助于及时发现潜在的运动风险。
27.第二,本发明能够使得前臂肌力不平衡患者或运动员可以在家庭或训练场所等室内环境,基于前臂肌力测试数据反馈,有针对性地训练弱侧肌群,调整训练计划,提高关节稳定性,降低运动损伤风险。
附图说明
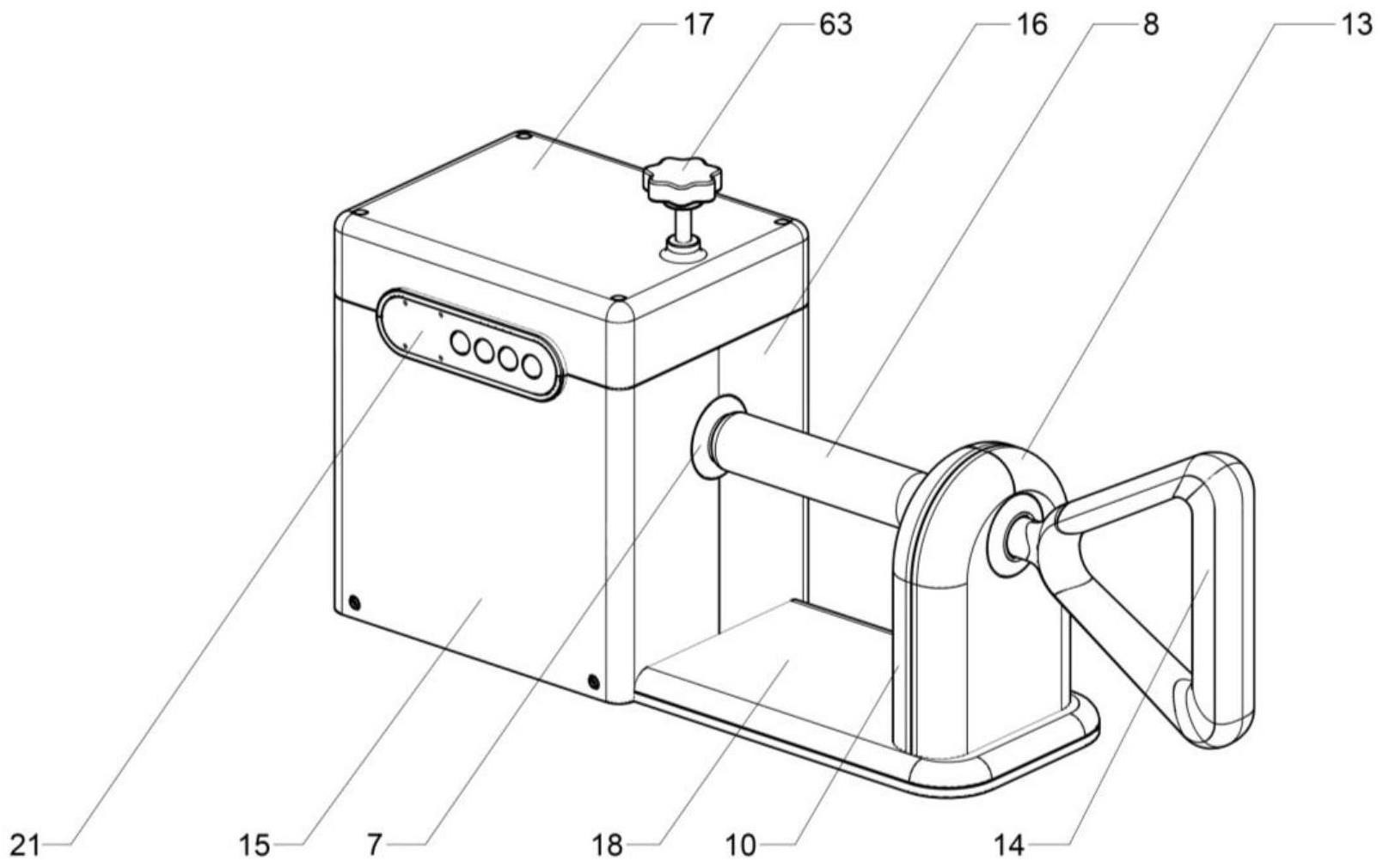
28.图1是本发明实施例提供的前臂肌力训练与评估系统的结构示意图;
29.图2是本发明实施例提供的前臂肌力训练与评估系统的剖面结构示意图;
30.图3是本发明实施例提供的前臂肌力训练与评估系统的电路连接原理图;
31.图4是本发明实施例提供的前臂肌力训练与评估系统的训练模式的示意图;
32.图5是本发明实施例提供的前臂肌力训练与评估系统的评估模式的示意图;
33.图6是本发明实施例提供的腕屈腕伸训练的示意图;
34.图7是本发明实施例提供的尺偏桡偏训练的示意图;
35.图8是本发明实施例提供的旋前旋后训练的示意图;
36.图9是本发明实施例提供的前臂肌力训练与评估方法的流程图;
37.图10是本发明实施例提供的腕力器示意图;
38.图11是本发明实施例提供的camry电子握力计示意图;
39.图12是本发明实施例提供的mangold-10生理多导仪示意图;
40.图13是本发明实施例提供的biotrace 软件界面示意图;
41.图14是本发明实施例提供的两组训练前后腕屈腕伸时mbi对比示意图;
42.图中:1、机架;2、静态扭矩传感器;3、轴;4、第一轴承座;41、第一轴承;5、键;6、轮;61、摩擦片;62、压块;63、旋钮螺柱;7、第一挡圈;8、第一把手;9、第二挡圈;10、第二轴承座左罩壳;12、第二轴承座;121、第二轴承;13、第二轴承座右罩壳;14、第二把手;15、前壳;16、后壳;17、上盖;18、底壳;19、信号变送器;20、单片机;21、显示屏;22、模式切换按键;23、确认按键;24、加键;25、减键;26、扬声器。
具体实施方式
43.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
44.如图1所示,本发明实施例提供的前臂肌力训练与评估系统包括前臂肌力训练装置和前臂肌力评估系统。
45.如图2所示,本发明实施例中的前臂肌力训练装置包括外壳、把手、旋钮螺柱(63)、显示屏(21)与按键,外壳包括第二轴承座左罩壳(10)、第二轴承座右罩壳(13)、前壳(15)、后壳(16)、上盖(17)、底壳(18),第二轴承座左罩壳(10)与第二轴承座右罩壳(13)通过卡扣连接,并均与底壳(18)和机架(1)固定连接,前壳(15)和后壳(16)通过卡扣连接,其上方与上盖连接,其下方与机架(1)固定连接,单片机(20)、扬声器(26)与前壳(15)固定连接,信号
变送器(19)与机架(1)固定连接。
46.把手包括第一把手(8)和第二把手(14),第一挡圈(7)和第二挡圈(9)分别用于第一把手(8)的左右限位,第二把手(14)与第一把手(8)之间设置了第二轴承座(12)和第二轴承(121),轮(6)与静态扭矩传感器(2)之间设置了第一轴承座(4)和第一轴承(41),第一轴承座(4)、第二轴承座(12)、静态扭矩传感器(2)、底壳(18)与机架(1)固定连接。
47.第一把手(8)固定在轴(3)上,第二把手(14)与轴(3)一端固定连接,轴(3)另一端与静态扭矩传感器(2)间隙配合,轴(3)与轮(6)通过键(5)连接,轮(6)的轮缘与摩擦片(61)相接触,摩擦片(61)与压块(62)固定连接,旋钮螺柱(63)通过上盖(17)的螺纹孔与压块(62)相接触,上盖(17)设置了挡片,用于限制压块前后左右的位移,通过旋转旋钮螺柱(63),压块(62)可产生弹性变形,进而增大或减小摩擦片(61)与轮(6)的轮缘间的压力,从而实现阻力的调节。
48.如图4所示,本发明实施例中的第一把手(8)带动轴(3)向右平移,轴(3)与静态扭矩传感器(2)分离,即切换为训练模式,此时轴(3)可转动,第一把手(8)与第二挡圈(9)相接触,参阅图6至图8,可实现腕屈、腕伸、尺偏、桡偏、旋前、旋后的训练动作。
49.如图5所示,本发明实施例中的第一把手(8)带动轴(3)向左平移,轴(3)与静态扭矩传感器(2)形成间隙配合,即切换为评估模式,此时轴(3)无法转动,点击模式切换按键(22)可在实时模式、峰值模式和预设模式之进行切换,当切换至峰值模式时,显示屏(21)实时显示当前轴(3)上的正反方向的峰值扭矩以及平衡性百分比,点击确认键(23)可保存数据,长按确认键(23)可查看历史数据,加键(24)与减键(25)用于调整预设模式下的扭矩预设值,当所测扭矩值大于预设扭矩值时,扬声器(26)发出提示音作为反馈。
50.如图2所示,本发明实施例中的前臂肌力评估系统包括静态扭矩传感器(2)、信号变送器(19)、单片机(20)、显示屏(21)、按键(22~25)、扬声器(26),静态扭矩传感器(2)、信号变送器(19)、显示屏(21)、按键(22~25)、扬声器(26)与单片机(20)电连接。
51.如图3所示,为本发明实施例提供的前臂肌力训练与评估系统的电路连接原理图。
52.前臂肌力评估系统设有三种模式:实时模式、峰值模式、预设模式。
53.点击模式切换键(22)切换至实时模式,显示屏(21)实时显示当前轴(3)上的扭矩,实时反映前臂肌力大小,单位为n
·
m,该模式有助于用户根据实时的扭矩反馈来调节合适的训练阻力。
54.点击模式切换键(22)切换至峰值模式,显示屏(21)实时显示当前轴(3)上的正反转的峰值扭矩以及平衡性百分比,反映前臂屈肌与伸肌肌群的最大肌力水平与肌力平衡性。该模式下,点击确认键(23)可保存数据,长按确认键(23)可查看历史测试数据,可通过加键(24)和减键(25)选择数据项并再次点击确认键(23)进行删除操作,该模式有助于用户对训练效果进行验证,预防并通过针对性的训练计划改善前臂肌力不平衡的情况。
55.点击模式切换键(22)切换至预设模式,显示屏(21)显示预设扭矩值,当轴(3)上的扭矩大于预设扭矩值时,扬声器(26)发出提示音作为反馈,该模式有助于用户判断所施加的扭矩是否达标,以保证训练强度。
56.本发明的工作原理是:使用前准备:将前臂肌力训练装置放置在桌面距离胸前一臂的距离,接通电源,调整座椅高度,使得前臂与桌面保持平行。
57.前臂肌力评估方法:握住所述第一把手将所述轴向左平移至与所述静态扭矩传感
器形成间隙配合,即切换为评估模式,通过自主最大用力正反转动所述第一把手可测量腕屈伸的扭矩值以及肌力平衡性,相应的,正握所述第二把手可测量尺偏、桡偏的肌力数据,侧握所述第二把手可测量前臂旋前及旋后的肌力数据,所测数据会显示在显示屏上,按下确认键保存数据,长按确认键查看历史测试数据,上下键可选择历史记录,再次按下确认键可删除数据,通过对比分析得到前臂肌力水平的变化。
58.前臂肌力训练方法:握住所述第一把手将所述轴向右平移至与所述静态扭矩传感器分离,即切换为训练模式;训练腕屈、腕伸动作时,采用所述第一把手,训练尺偏、桡偏、旋前、旋后时,采用所述第二把手。根据肌力评估结果,通过增加组数、次数或阻力有针对性地增加训练弱侧肌肉的训练,其中,顺时针旋转所述旋钮螺柱可增大阻力,逆时针减小阻力,每种训练动作4~5组,每组12~15次,组间休息30秒,每周训练3~4次,可根据数据反馈自行调整训练计划。
59.训练两周后,再次对前臂肌力进行测量评估,通过查看与对比历史测量数据,可了解自身前臂肌群力量水平与平衡性的变化,有助于判断关节稳定性、肌力恢复或增长的程度以及训练计划的有效性。
60.如图4所示,为本发明实施例提供的前臂肌力训练与评估系统的训练模式的示意图。
61.如图5所示,为本发明实施例提供的前臂肌力训练与评估系统的评估模式的示意图。
62.如图6所示,为本发明实施例提供的腕屈腕伸训练的示意图。
63.如图7所示,为本发明实施例提供的尺偏桡偏训练的示意图。
64.如图8所示,为本发明实施例提供的旋前旋后训练的示意图。
65.实施例1:
66.如图9所示,本发明实施例提供的前臂肌力训练方法,包括以下步骤:
67.s1,训练前准备:调整座椅高度至前臂桌面水平。
68.s2,切换为训练模式:将第一把手(8)向右水平拉出至第一把手(8)与第二挡圈(9)相接触。
69.s3,设置阻力:顺时针旋转旋钮螺柱(63)可增大阻力,逆时针旋转可减小阻力,阻力应根据自身肌力情况和肌力测试结果进行合理设置。
70.s4,训练动作:参阅图6,采用第一把手(8)可进行腕屈腕伸训练;参阅图7和图8,采用第二把手(14)可进行尺偏、桡偏、旋前、旋后训练。
71.s5,训练开始:每种动作做4至5组,每组重复12到15次,组件休息30秒,每周训练3至4次。
72.s6,训练结束,拉伸放松前臂肌肉。
73.实施例2:
74.如图9所示,本发明实施例提供的前臂肌力评估方法,包括以下步骤:
75.s1,测试前准备:调整座椅高度至前臂桌面水平。
76.s2,切换为评估模式:将第一把手(8)向左水平推入至第一把手(8)与第一挡圈(7)相接触。
77.s3,选择峰值模式:点击模式切换键,将当前测量模式切换至峰值模式。
78.s4,测试动作:采用第一把手(8)测试腕屈腕伸的峰值扭矩及平衡性,采用第二把手(14)测试尺偏桡偏、旋前旋后的峰值扭矩及平衡性。
79.s5,数据查看与保存:点击确认键保存数据,长按确认键查看历史测量数据。
80.s6,根据测试结果,评估前臂肌力与平衡性是否较前一次测量结果有所改善。
81.作为本发明的优选实施例,本发明可以点击模式切换按键,选择峰值模式。正反旋转把手测量正反转的峰值扭矩和肌力平衡性,其中,肌力平衡性为正反峰值扭矩的比率。以腕屈、腕伸动作为例,该比率大于100%时,说明腕屈力大于腕伸力,小于100%大于0%时,说明腕屈力小于腕伸力。
82.本发明可以测量人体单侧和双侧的肌力与肌力平衡性。根据肌力平衡性比率可评估肌力发展水平、判断潜在的损伤风险。一般认为,当腕伸腕屈、尺偏桡偏、旋前旋后的最大肌力差异超过30%时,可判断为肌力不平衡。
83.作为本发明的优选实施例,具体来说,肌力平衡性的评估分为6级。
84.95%-105%:左右两侧肌肉肌力发展均衡,处于理想的肌力平衡状态;
85.90-95%或105-110%:左右两侧的肌肉力量非常接近,肌肉功能状态正常、健康;
86.85-90%或110-115%:左右两侧的肌肉力量相对接近,存在轻微不平衡的情况,出现损伤的可能性小,但需要进行针对性的锻炼;
87.80-85%或115-120%:左右两侧的肌肉力量不平衡,存在损伤风险,需要进行针对性的康复训练或治疗;
88.75-80%或120-125%:左右两侧的肌肉力量明显不平衡,可能会导致身体姿势异常、损伤风险较高,需要进行及时治疗;
89.0-70%或130%以上:左右两侧的肌肉力量极度不平衡,关节、肌肉损伤风险极高,需要进行及时治疗,必要时需手术干预。
90.对于同一动作来说,当患侧的肌力达到健侧的80%及以上,说明肌力已基本恢复。达到95%及以上,说明肌力已完全恢复。
91.本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
92.应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中,由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
93.本发明设计了握力实验与表面肌电实验来验证本发明的有效性,将14名爱好球类运动的大学生随机均分为实验组和对照组,实验组采用本发明的装置进行基于肌力评估的针对性的腕屈腕伸训练,对照组采用腕力器(见图10)进行腕屈腕屈训练,训练周期为2周,每周3天。在训练前后采用camry电子握力计(见图11)采集所有的受试者优势侧的握力,采用mangold-10生理多导仪(见图12)与biotrace 软件(见图13)采集受试者腕屈、腕伸最大等长收缩时桡侧腕屈肌(fcr)、尺侧腕伸肌(ecu)、桡侧腕长伸肌(ecrl)、肱桡肌(br)的表面肌电信号,将其导入matlab r2020b进行预处理并提取特征值mbi(muscle balance index),最后将训练前后的握力及握力体重指数、mbi导入ibm spss statistics 26进行独立样本t检验和配对t检验,实验结果如表1、表2、图14所示。
94.表1两组训练前后握力与握力体重指数组内变化
[0095][0096]
注:与训练前相比,*p《0.05,**p《0.01。
[0097]
表2两组训练前后前臂mbi组内变化
[0098][0099]
注:与训练前相比,*p《0.05,**p《0.01。
[0100]
实验组训练前后腕屈的mbi无显著性差异,但腕伸的mbi呈现出了极显著差异(p《0.01),而对照组训练前后腕屈腕伸的mbi均为未呈现出显著性差异。
[0101]
实验结果表明,训练后实验组的握力与握力体重指数、腕伸时的bmi显著优于训练前(p《0.01),腕屈与腕伸时的bmi均优于对照组(p《0.05),而对照组训练前后握力及握力体重指数、腕屈与腕伸mbi无显著性差异(p》0.05)。本次实验验证了本发明的装置在发展前臂整体肌力与改善前臂肌力平衡性方面相比于腕力器更具有优势。
[0102]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!