高速公路小半径匝道车路协同行车预警与汇入方法与流程-j9九游会真人
1.本发明涉及智能行车技术领域,具体涉及高速公路小半径匝道车路协同行车预警与汇入方法。
背景技术:
2.由于受到经济、美观、环保和社会等因素的限制,施工中需要将匝道的曲线半径控制在一个较小的范围内,投入运营后极易发生交通事故,对安全运营起到了不利影响。
3.随着智联网、网联车的飞速发展,将车路协同技术运用于小半径匝道上具有显著的优势,其优势在于车路协同技术可以辅助驾驶员进行更优的决策和判断,从而提高驾驶的安全性。同时,智能网联车相较于传统车辆拥有以下优势:安全性更高,智能网联车配备了先进的安全系统,能有效减少交通事故的发生,智能网联车可以实现车辆和人、车辆和车辆之间的互联,具有更高的信息交互和数据共享能力,智能网联车可以通过实时交通信息的获取和处理。最后,此技术运用在轻型立体高速公路上也拥有很好的表现和效果。
4.若立交主线设计速度为100-120km/h,匝道半径采用极限半径时,车辆进入匝道基本路段速度较高,在进入小半径匝道前减速不及时或驾驶人操作失误,驾驶人即会以较高速度驶出立交主线,如果驾驶人无法准确判断小半径匝道适应车速,减速不及时,超高无法提供离心力背离作用,便会导致交通事故,另外车辆(大型车)重心较高时,极易发生翻下匝道的恶性事故。因为小半径匝道存在车辆转弯速度过大、驾驶难度大、视距不佳等安全隐患,所以会导致高速公路小半径匝道事故发生率高居不下,给人们生命和财产带来巨大的威胁。因此,小半径匝道处速度过大是引起交通事故的重要原因,加强该处速度预警至关重要。
技术实现要素:
5.本发明意在提供高速公路小半径匝道车路协同行车预警与汇入方法,以提供一种在小半径匝道处对行车进行预警的方法。
6.为达到上述目的,本发明采用如下技术方案:高速公路小半径匝道车路协同行车预警与汇入方法,包括以下步骤:
7.步骤1:在匝道及主路处设置信息采集硬件设施,通过信息采集硬件设施获取车辆的身份信息、天气信息和匝道数据,并对主路及匝道上车辆运动情况及位置信息进行实时采集;
8.步骤2:在匝道上设置动态限速提醒装置,根据匝道数据和天气信息计算当前匝道的动态安全行驶速度,在动态限速提醒装置上发布速度预警;
9.步骤3:预测匝道车辆汇入信息,包括判断匝道车辆是否是网联车,如果是网联车对网联车辆分段进行实时协同编组,每一编组的匝道车辆智能协同汇入高速公路主路;如果是非网联车,通过匝道上车辆运动情况及位置信息对车辆的行驶轨迹进行预测;在匝道车辆汇入主路处设置向主路车辆发布匝道车辆汇入预警的车辆探测预警标志。
10.本方案的有益效果为:
11.本发明通过对匝道区域数据的多源接入,可实现匝道区域高精雷达监测数据、高精精度定位数据等实时处理,减少了信息流转时间,增加了事件的时效性,配合主路、匝道动态提醒进行预警,协助驾驶员对道路状况进行判断,从而有效避免事故的发生。
12.通过匝道区域的计算,可实现匝道区域多车辆的行为轨迹预测判断;通过对匝道区域车辆位置预计判断,可实现车道级预警提示信息,为匝道并线事故预警、交通违章信息提醒、交通状况预测等提供策略与车道级管控服务支撑,提升匝道区域的安全水平降低匝道区域的事故发生率。
13.优选的,作为一种改进:在步骤3中,对网联车协同编组具体包括以下步骤:
14.步骤3.1:自匝道进口端到出口端依次设有控制区间、编组区间、编组完成区间和汇入区间,当匝道车辆到达控制区首段时对车辆进行车辆身份信息识别,判断车辆是否是智能网联车,若车辆为智能网联车,对匝道上的智能网联车辆进行协同控制;
15.步骤3.2:匝道车辆在编组区间进行编组,使得控制区到编组区间的所有智能网联车辆形成一个编组,若中途出现非网联车,编组则自动结束,计算主线协同车辆所在的位置区间范围,对主线协同车辆上的网联车进行协同控制,在主路上为匝道上的编组车辆预留可汇入间隙;
16.步骤3.3:计算得到主路可提供的汇入时间长度,协同控制编组车辆加速汇入主路。
17.有益效果为:对匝道上的车辆进行实时的协同编组,并智能地将它们汇入高速公路主路。这样可以提高匝道车辆的行驶效率和整体交通流畅度;信息处理硬件设施对车辆的行驶轨迹进行预测。这有助于更准确地了解车辆的动态行为,并作出相应的决策和预警。通过智联网对匝道车辆进行智能编组,在保证主线车辆同通行安全顺畅的基础下,通过信息提示主线网联与非网联车辆进行车道交换,为匝道车辆汇入提供空间。
18.通过优化编组、提供汇入间隙和控制汇入速度,该方法可以提高匝道车辆的汇入效率和安全性,匝道车辆可以更加顺畅地加速并汇入主路,减少汇入过程中的紧急刹车、迅速加速等危险行为,从而减少事故的发生概率。
19.优选的,作为一种改进,在行驶过程中,若车辆车速超过动态安全行驶速度阈值,车载导航系统会提出超速警告。
20.有益效果为:如果车辆速度已经超过动态安全行驶速度阈值车载导航系统发布超速警告,以降低匝道处交通事故发生频率的目的。
21.优选的,作为一种改进,动态安全行驶速度阈值通过以下公式计算:
[0022][0023]
有益效果为:该动态安全行驶速度阈值综合考虑了匝道限速值、舒适加速度、匝道宽度、车道数、匝道半径以及不良天气影响修正系数等因素,计算匝道的最高安全车速阈值,通过针对不同的匝道的具体情况进行实时计算分析,保证该速度阈值的可靠性,同时满足驾驶员的舒适和安全需求。
[0024]
优选的,作为一种改进,β的取值如下:雨天β的数值为0.83,雪天β的数值为0.72,
雾天β的数值为0.85。
[0025]
有益效果为:不同天气条件下,如雨天、雪天和雾天,道路的湿滑程度和能见度都会受到影响,通过使用不同的修正系数β,可以根据具体天气情况调整最高安全车速阈值,以适应当前的道路状况,避免由于天气造成的潜在危险,提高驾驶的安全性。
[0026]
优选的,作为一种改进,匝道数据包括当前匝道的事故数据、匝道的曲率、坡度、流量、限制速度,事故数据包括事故位置、事故类型和事故严重程度;在装有车载高精度地图上,标明事故受影响路段及涉及的范围。
[0027]
有益效果为:利用事故数据和匝道数据,可以为驾驶员提供实时提供更加准确的风险预警。
附图说明
[0028]
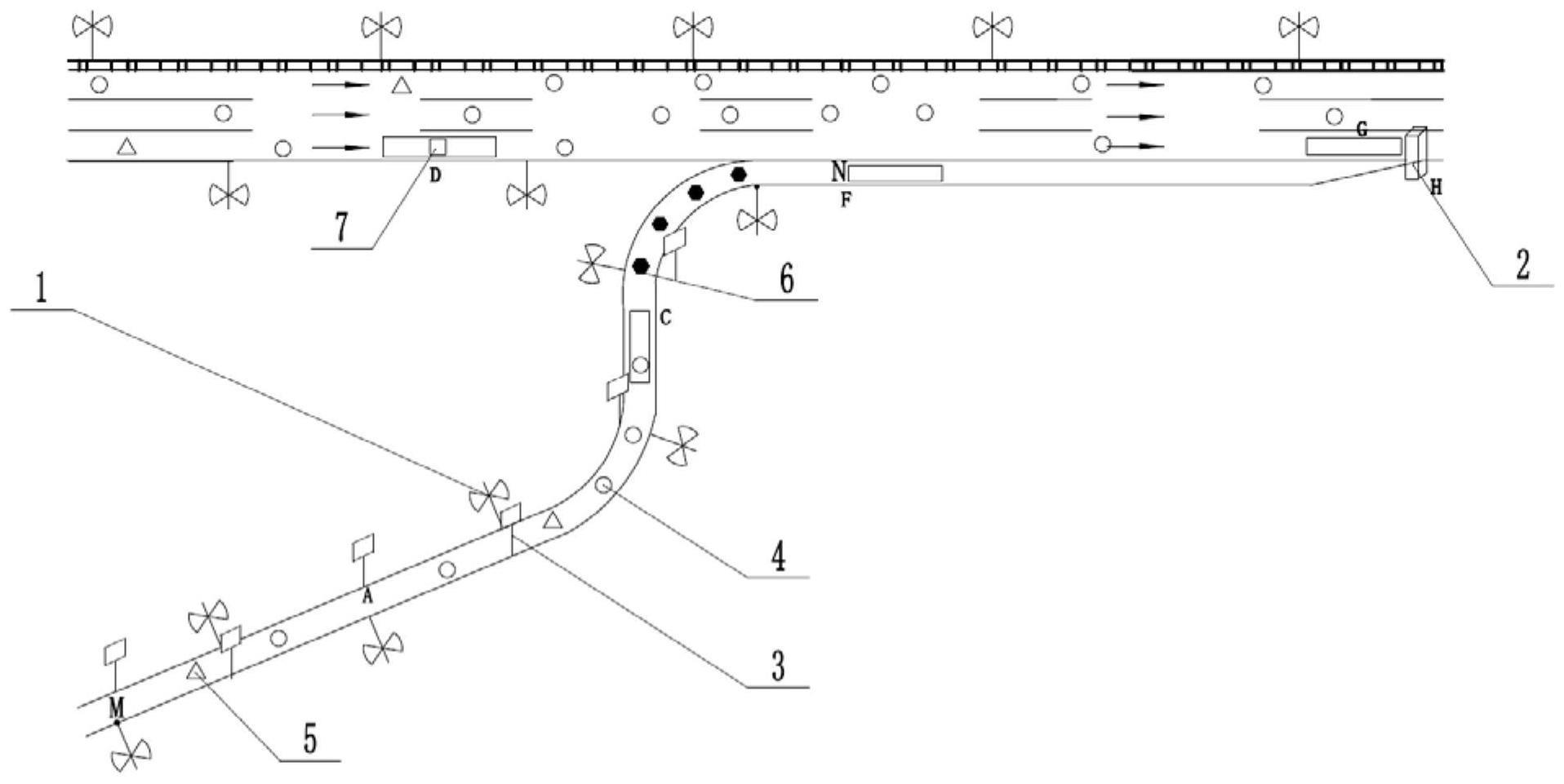
图1为本发明小半径匝道车路协同编组行车预警与汇入方法整体示意图;
[0029]
图2是本发明车辆探测预警标志的示意图;
[0030]
图3是本发明动态限速提醒装置示意图。
具体实施方式
[0031]
下面通过具体实施方式进一步详细说明:
[0032]
说明书附图中的附图标记包括:高精度雷达1、车辆探测预警标志2、动态限速提醒装置3、网联车辆4、非网联车辆5、编组车辆6、主线协同车辆7、显示屏8、可变led速度动态提示屏9、超速警告屏10。
[0033]
实施例
[0034]
实施例基本如图1-图3所示,如图1所示的高速公路小半径匝道车路协同行车预警与汇入方法,包括以下步骤:
[0035]
步骤1:在匝道及主路处设置信息采集硬件设施,如图1所示,包括在匝道起始点m和加速车道首端n点分别设置一个高精度雷达1,同时匝道路段内高精度雷达1设置间距为每100-200m一个;匝道路段每隔80-120m设置一个高清摄像头;高速公路主路路侧每250-350m设置一个高精度雷达1,通过信息采集硬件设施获取车辆的身份信息、天气信息和匝道数据,并对主路及匝道上车辆运动情况及位置信息进行实时采集。
[0036]
匝道数据包括当前匝道的事故数据、匝道的曲率、坡度、流量、限制速度,事故数据包括事故位置、事故类型和事故严重程度;结合事故发生类型、数据接受情况、车辆运行状况,实时判断事故所影响的范围,具体到车道及辐射半径;在装有车载高精度地图上,标明受影响路段及涉及的范围,以便于提醒车辆注意行驶安全。
[0037]
步骤2:在匝道上设置动态限速提醒装置3,如图3所示,动态限速提醒装置3上设有一可变led速度动态提示屏9和超速警告屏10,在匝道路段,从m点至n点,每隔100-200m安装一个动态限速提醒装置3;根据匝道数据和天气信息计算当前匝道的动态安全行驶速度,在动态限速提醒装置3上发布速度预警。
[0038]
动态安全行驶速度阈值通过以下公式计算:
[0039][0040]
式中:v
max
为匝道最高安全车速阈值,km/h;v0为匝道限速牌显示的限速值,km/h;a
best
为使驾驶员舒适的加速度值,取值为2m/s2;d为匝道宽度,m;n为匝道车道数;r为匝道半径,m;β为不良天气影响修正系数。
[0041]
不良天气对最高车速的影响修正系数表如下:
[0042]
表1不良天气影响修正系数表
[0043][0044]
在行驶过程中,若车辆车速超过动态安全行驶速度阈值,车载导航系统会提出超速警告。
[0045]
步骤3:预测匝道车辆汇入信息,包括判断匝道车辆是否是网联车辆4,如果是网联车辆4对网联车辆4分段进行实时协同编组,每一编组的匝道车辆智能协同汇入高速公路主路;如果是非网联车辆5,通过匝道上车辆运动情况及位置信息对车辆的行驶轨迹进行预测;在匝道车辆汇入主路处设置向主路车辆发布匝道车辆汇入预警的车辆探测预警标志2,在主路两侧设置提示标志。
[0046]
步骤3.1:自匝道进口端到出口端依次设有控制区间、编组区间、编组完成区间和汇入区间,当匝道车辆到达控制区首端a点时对车辆进行车辆身份信息识别,判断车辆是否是智能网联车,若车辆为智能网联车,对智能网联车进行编组。
[0047]
步骤3.2:网联车辆4在编组区间进行编组后成为编组车辆6,编组区间起点距加速车道首端沿匝道方向实际距离250-300m,编组区间长度为50m,使匝道控制区首端a点至编组区间的所有智能网联车辆4形成一个编组,若中途出现非网联车辆5,编组则自动结束,当网联车辆4行驶到编组区间的末端c点时完成编组,对编组车辆6进行协同控制。
[0048]
计算主线协同车辆7所在的位置区间范围,主线协同车辆7的所在位置范围根据以下公式确定:
[0049][0050]
式中:li为a点至加速车道末端的实际行驶距离,m;为主线道路车辆的平均速度,m/s;l1为协同车辆距预计汇入区间右端的距离,m;v
max
为匝道内最高限速值,m/s。
[0051]
之后匝道编组车辆6经过速度、车间距的调整到达编组完成区间,编组完成区间起点f与加速车道起点重合,编组完成区间直线长为30米,此时对处于主线协同车辆7所在位置范围的网联车进行车速调整,主路上车辆为匝道上的编组车辆6预留可汇入间隙,使得编组车队在到达汇入区间时无任何车辆。同时,在此区域内的非网联车,会通过提示标志提醒非网联车靠左边两车道行驶,给匝道车辆提供良好的汇入环境。
[0052]
对于非智能网联车及未能编组的智能网联车,根据匝道路段限速牌显示的限速值,同时高精度雷达1及高清摄像头将交通流等信息传递到车速控制器中,基于以上信息通过动态安全行驶速度阈值计算得到当前车辆的最高安全车速阈值,当前车辆需以小于此车
速的速度行驶,在行驶过程中,若车辆车速超过上述阈值,车载导航系统及智能限速标志会提出超速警告。
[0053]
步骤3.3:计算得到主路可提供的汇入时间长度,协同控制编组车辆6加速汇入主路。
[0054]
主线可提供的汇入时间长度g根据以下公式计算:
[0055][0056]
式中:c
max
为主线最右车道的最大通行能力,pcu/h;q为主线各车道的交通量,pcu/h;为平均车头时距,s。
[0057]
如图2所示,车辆探测预警标志2辅助匝道车辆汇入主路,当车辆探测预警标志2接收到编组车队汇入主路的信息,车辆探测预警标志2上设有显示屏8,车辆探测预警标志2的显示屏8上会显示“注意避让”的标志,以此提高车辆汇入的安全性。
[0058]
以某高速公路小半径匝道为例,
[0059]
1)经调查某高速公路小半径匝道的基本数据如表1所示。
[0060]
表1某高速公路小半径匝道基本数据
[0061]
liv0dnr800m40km/h7m270m
[0062]
2)通过采集与计算模块,采集天气状况以及道路实时状况,以雨天匝道为例,采集到以下数据。
[0063]
表2某高速公路采集数据
[0064][0065]
3)根据公式,相关数据代入计算可得到主线协同车辆7所在的位置区间和主线车辆可提供的汇入时间间隙tg:
[0066]
1600m≤l1≤1700m
[0067]
tg=6.3s
[0068]
4)根据公式,相关数据代入计算可得到在雨天环境下,基于匝道智能限速方法下的小半径匝道最大安全车速阈值:
[0069]vmax
=28.47km/h
[0070]
本发明还意在提供高速公路小半径匝道车路协同行车预警与汇入的系统,适用于上述高速公路小半径匝道车路协同行车预警与汇入方法,包括:
[0071]
数据采集模块,包括设置在匝道及主路上的高精度雷达1、高精度gps、摄像头和高精度检测仪;
[0072]
数据处理模块,进行匝道的边界处理,对数据进行数据级、特征级、决策级的提取计算,对车辆的行驶轨迹进行预测;
[0073]
计算模块,计算主线协同车辆7的所在位置范围,计算主线可提供的汇入长度和最高安全车速阈值。
[0074]
预警信息发布模块,包括设置在主路上的车辆探测预警标志和设置在匝道上的动
态限速提醒装置3。
[0075]
以上所述的仅是本发明的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!