一种沉船自动浮离北斗通信报警装置及其工作方法与流程-j9九游会真人
1.本发明涉及沉船自动报警领域,具体地说是涉及一种沉船自动浮离北斗通信报警装置,以及该沉船自动浮离北斗通信报警装置的工作方法。
背景技术:
2.传统的沉船自动浮离装置,是采用入水后在水的压力作用下产生分离。该装置主要由功能主体、分离体和固定体三部分组成。固定体固定于船舶,固定体通过分离体连接功能主体。功能主体构造有一个密封舱,密封舱与分离体通过易形变的结构件连接,该结构件初始时用来限位。当船舶沉船后,整套装置随船舶入水,当达到一定水深后,密封舱与分离体之间形成一定的压力差,该压力差正好使易形变的结构件发生变形。当结构件发生变形后,不能继续保持限位功能,致使功能主体与固定体分离,实现自动浮离。
3.上述装置设计复杂冗余、安装繁琐,且失效风险大。因船舶长时间处于多变的海况下,密封舱极易遭到雨水、海水、烈日的破坏,进而造成密封舱泄压。沉船后密封舱漏水,不能形成一定的内外压力差,限位结构件不足以发生结构形变,进而不能实现正常的自动浮离,影响报警功能。
4.另外,传统的沉船报警方式,主要以声光报警为主。当沉船且正常浮离后,功能主体在水面上,会间歇性闪烁红色灯光,同时发出蜂鸣声,用以引起海面或者江面其他船舶的注意。这种报警方式可用性极差,可视性与可听性,在未知海域及未知海况下,非常有限,常会导致营救方不能接收到实时报警信号,造成营救时间的浪费。甚至由于声光报警的高功耗,导致有限的储存电量,在短时间内被消耗掉,且声光报警信息未被有效接收,进而造成更大的经济损失,甚至人身安全。
技术实现要素:
5.基于上述技术问题,本发明提出一种沉船自动浮离北斗通信报警装置及其工作方法。本发明具有结构简易,沉船后可稳定高效浮离报警等优点。
6.本发明所采用的技术j9九游会真人的解决方案是:一种沉船自动浮离北斗通信报警装置,包括浮离主体和固定体,浮离主体和固定体之间为可拆连接;所述浮离主体包括外壳体,在外壳体的上方设置有上盖,在外壳体的内部形成有密封舱;在外壳体的底部设置有连接孔,在固定体的端部设置有与连接孔相适配的连接杆,连接杆插入连接孔中,在连接杆的末端设置有通孔;在通孔中插入有插栓,在密封舱中设置有用于控制插栓插入通孔或从通孔中拔出的插拔机构;所述插拔机构包括驱动装置、摆动臂和移动座,驱动装置的动力轴与摆动臂的一端连接,摆动臂的另一端穿过移动座,在摆动臂往复摆动时能够带动移动座来回移动;所述插栓安装在移动座上;
在密封舱的内部设置有控制装置,在密封舱的一侧设置有水压传感器,水压传感器与控制装置连接,控制装置还连接驱动装置;在密封舱的内部还设置有通信模块;所述固定体安装在船体上;所述浮离主体在水中的浮力大于自身重力。
7.优选的,在浮离主体和固定体之间还设置有弹簧,当浮离主体和固定体相连接时,弹簧处于压缩状态。
8.优选的,所述弹簧套在连接杆的外侧,在外壳体的底面且位于连接孔的周圈,以及固定体与连接杆相连接的端部均设置有用于弹簧端部卡入限位的凹槽。
9.优选的,所述外壳体的底部设置有向上凸起的连接柱,连接孔形成于连接柱上,在连接柱的侧壁上,且正对插入连接孔中连接杆的通孔处设置有过孔,所述插栓的一端穿过过孔,并插入通孔中。
10.优选的,所述移动座包括竖直板和水平板,水平板连接在竖直板的下部;在竖直板上设置有方形口,所述摆动臂从方形口中穿过;在水平板上设置有限位孔,在限位孔中穿过有限位柱,限位柱固定在外壳体上。
11.优选的,所述限位孔呈条形,包括第一限位孔和第二限位孔,第一限位孔和第二限位孔处于同一直线上;所述限位柱呈竖向布置,安装在外壳体的底部,限位柱包括第一限位柱和第二限位柱,第一限位柱置于第一限位孔中,第二限位柱置于第二限位孔中;所述插栓呈l形,包括竖直段和水平段,插栓的竖直段穿过水平板,插栓的水平段插入通孔;在插栓的水平段上还设置有支撑套,在支撑套上设置有栓孔,插栓的水平段从栓孔中穿过;支撑套与外壳体固定连接。
12.优选的,在外壳体的内部还设置有透水舱,在外壳体的侧壁和底部且对应透水舱的位置处均设置有透水孔;在透水舱的顶部设置有支撑隔板,在支撑隔板上设置有安装孔,所述水压传感器插入安装孔中,并将透水舱和密封舱分隔开;水压传感器的下部区域置于透水舱中,水压传感器的上部区域置于密封舱中。
13.优选的,所述通信模块集成到控制装置上,形成通信控制板;在密封舱内还设置有北斗天线和供电电源,北斗天线与通信控制板连接;供电电源分别连接通信控制板和驱动装置。
14.优选的,在外壳体的底部设置有插接公头,在固定体上设置有与插接公头相适配的插接母头;当浮离主体与固定体连接后,插接公头与插接母头对应连接在一起;所述固定体安装在船舶桅杆上;固定体呈圆柱状,在固定体的一侧且沿其长度方向设置有弧形凹口,固定体的弧形凹口与船舶桅杆的一侧相贴合;在固定体的周向上下间隔设置有若干个抱箍槽。
15.如上所述的一种沉船自动浮离北斗通信报警装置的工作方法,包括以下步骤:(1)浮离主体和固定体连接,固定体的连接杆插入浮离主体上的连接孔中,插栓插入连接杆末端的通孔中;插接公头与插接母头对应连接在一起;固定体安装在船舶桅杆上;(2)船舶正常航行时,通过浮离主体上的通信控制板和北斗天线进行导航定位;
(3)当船舶遇险沉船时,浮离主体和固定体随船体入水,水进入透水舱中;当水压传感器感应到水压后,会释放遇水信号给通信控制板,通信控制板控制驱动装置运转;驱动装置带动摆动臂转动,摆动臂带动移动座移动,移动座在移动时带动插栓从通孔中拔出,并在弹簧的恢复力作用下,使得浮离主体和固定体相分离;浮离主体所受到的水的浮力大于自身重力,在浮力的作用下,浮离主体会上浮至水面;(4)浮离主体上浮至水面后,通信控制板将短报文报警信息发出。
16.本发明的有益技术效果是:本发明采用水压传感器感知入水信号,并通过一系列机械动作控制浮离主体和固定体相脱离,进而实现浮离主体的上浮报警。本发明具有运行平稳,失效风险低等优点,可确保船舶遇险后的及时报警。而且,本发明仅包括浮离主体和固定体两部分,结构简化合理,安装方便,制造成本低,适合市场化推广使用。
17.本发明利用北斗卫星导航定位系统,以短报文的形式将报警信息及沉船经纬度信息,发送到船舶管理中心,实现突发情况的实时报警,船舶管理中心可根据沉船经纬度快速找到沉船方位,大大缩短救援时间。
附图说明
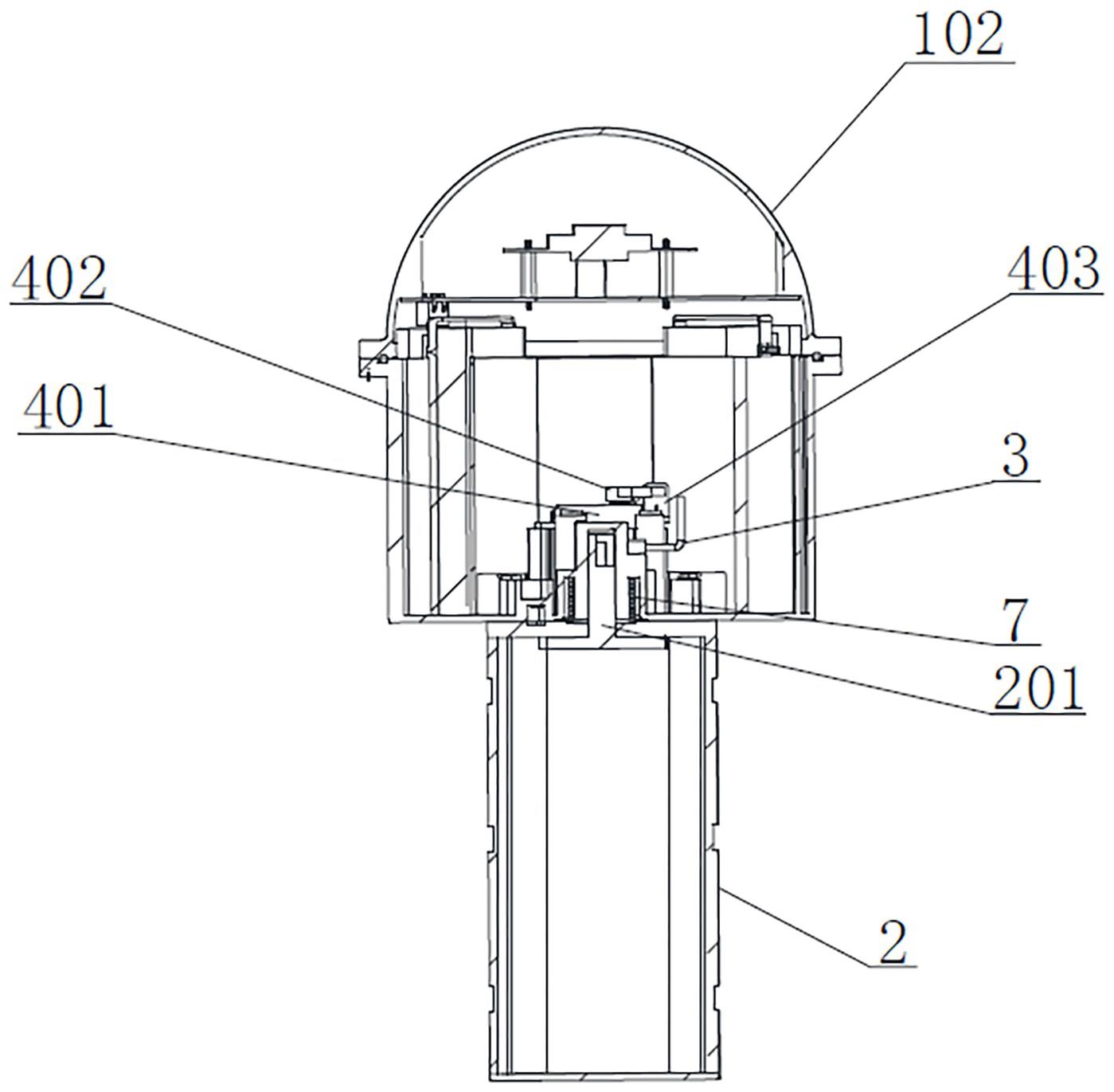
18.下面结合附图与具体实施方式对本发明作进一步说明:图1为本发明沉船自动浮离北斗通信报警装置的外部结构示意图;图2为图1中上盖与外壳体的结构拆分示意图;图3为本发明中外壳体内部的结构示意图,主要示出插拔机构部分;图4为本发明中外壳体底部的结构示意图;图5为本发明中浮离主体的剖面示意图;图6为本发明中固定体的结构示意图;图7为图6的正向视图;图8为本发明沉船自动浮离北斗通信报警装置的第一剖面视图;图9为本发明沉船自动浮离北斗通信报警装置的第二剖面视图;图10为本发明中插拔机构的结构示意图,图中示出插栓拔出状态;图11为图10的正视结构示意图;图12为图10的俯视结构示意图;图13为本发明中插拔机构的结构示意图,图中示出插栓插入状态;图14为图13的正视结构示意图;图15为图13的俯视结构示意图。
19.图中:1-浮离主体,2-固定体,3-插栓,4-插拔机构,5-控制装置,6-水压传感器,7-弹簧,8-凹槽,9-北斗天线,10-供电电源,11-插接公头,12-插接母头;101-外壳体,102-上盖,103-密封舱,104-连接孔,105-连接柱,106-透水舱,107-支撑隔板;1061-透水孔;201-连接杆,202-通孔,203-抱箍槽,204-弧形凹口;
301-竖直段,302-水平段,303-支撑套;401-驱动装置,402-摆动臂,403-移动座;4031-竖直板,4032-水平板,4033-方形口,4034-限位孔,4035-限位柱。
具体实施方式
20.实施例1:如图1-2所示,一种沉船自动浮离北斗通信报警装置,包括浮离主体1和固定体2,浮离主体1和固定体2之间为可拆连接。所述浮离主体1包括外壳体101,外壳体101呈圆柱状,在外壳体101的上方设置有上盖102,上盖102呈半球形。上盖102和外壳体101之间采用螺纹连接或其他常规连接方式。上盖102连接在外壳体101的顶部时,起到密闭效果,在上盖和外壳体之间形成有密封舱103。如图4所示,在外壳体101的底部设置有连接孔104,在固定体2的端部设置有与连接孔104相适配的连接杆201,连接杆201插入连接孔104中,在连接杆201的末端设置有通孔202,通孔202呈横向布置。
21.在通孔202中插入有插栓3,在密封舱103中设置有用于控制插栓3插入通孔或从通孔中拔出的插拔机构4。当插栓3插入通孔202中后,浮离主体1和固定体2连接在一起。当插栓3从通孔202中拔出后,浮离主体1和固定体2可进行分离。
22.如图3、图5、图8-9所示,所述插拔机构4包括驱动装置401、摆动臂402和移动座403,驱动装置401的动力轴与摆动臂402的一端连接,摆动臂402的另一端穿过移动座403,在摆动臂402往复摆动时能够带动移动座403横向来回移动。所述插栓3安装在移动座403上,相应地会随着移动座403横向来回移动,进而实现从通孔202中拔出和插入。
23.在密封舱103的内部设置有控制装置5,在密封舱的一侧设置有水压传感器6,水压传感器6与控制装置5连接,控制装置5还连接驱动装置401。当装置随船体进入水中后,水压传感器6感受到压力,并将信号传递至控制装置5,控制装置5控制驱动装置401,使其通过摆动臂402带动移动座403移动,进而实现插栓3从通孔202中拔出。此时,浮离主体1可在水的浮力作用下,上浮至水面。在密封舱103的内部还设置有通信模块,以发送报警信息等。
24.上述固定体2安装在船体上。上述浮离主体1在水中的浮力大于自身重力,因此当其脱离与固定体2的连接后,可在自身浮力作用下快速上浮至水面,并进行通信报警。
25.本发明采用水压传感器6感知入水信号,并通过一系列机械动作控制浮离主体1和固定体2相脱离,进而实现浮离主体1的上浮报警,装置整体具有运行平稳,失效风险低等优点,可确保船舶遇险后的及时报警。而且,本发明仅包括浮离主体1和固定体2两部分,结构简化合理,安装方便,制造成本低,适合市场化推广使用。
26.实施例2:在上述实施例1结构基础上,本发明还进行如下更为具体的设置。
27.如图2、图9所示,在浮离主体1和固定体2之间还设置有弹簧7,当浮离主体1和固定体2相连接时,弹簧7处于压缩状态。当装置入水后,插栓3从通孔202中拔出,此时弹簧7给浮离主体1回弹力,促使其快速与固定体2脱离,并在自身浮力作用下上浮。
28.在具体布置时,上述弹簧7套在连接杆201的外侧。在外壳体101的底面且位于连接孔104的周圈,以及固定体2与连接杆201相连接的端部均设置有凹槽8,通过凹槽8可使得弹簧7端部卡入,并对弹簧7进行限位。
29.实施例3:在上述实施例1结构基础上,本发明还进行如下更为具体的设置。
30.所述外壳体101的底部设置有向上凸起的连接柱105,连接孔104形成于连接柱105
上。连接柱105也可与外壳体101为一体式结构,可看成在外壳体101的底部中心向内凸起,形成连接孔。在连接柱105的侧壁上,且正对插入连接孔中连接杆的通孔202处设置有过孔,所述插栓3的一端穿过过孔,并插入通孔202中。
31.在插栓3的外壁和过孔之间也可进一步密封。
32.该设置方式可使得插栓3从通孔202中拔出时,密封舱103仍具有良好密封性。插栓3从通孔202中拔出后,插栓3仍会继续留置于过孔中,不会使得外界水经过孔流入密封舱103中,因此该结构方式对密封舱103起到密封保持效果。既能实现浮离主体1和固定体2的脱离,又能在脱离后,确保水中浮离主体1的密封舱具有密封效果。
33.实施例4:在上述实施例1结构基础上,本发明还进行如下更为具体的设置。
34.如图3、图10-15所示,上述移动座403包括竖直板4031和水平板4032,水平板4032连接在竖直板4031的下部。在竖直板4031上设置有方形口4033,所述摆动臂402从方形口4033中穿过。在水平板4032上设置有限位孔4034,在限位孔4034中穿过有限位柱4035,限位柱4035固定在外壳体101上。
35.具体地,所述限位孔4034呈条形,包括第一限位孔和第二限位孔,第一限位孔和第二限位孔处于同一直线上。所述限位柱呈竖向布置,安装在外壳体101的底部,限位柱包括第一限位柱和第二限位柱,第一限位柱置于第一限位孔中,第二限位柱置于第二限位孔中。通过限位柱4035和限位孔4034的配合,可对移动座403的移动幅度进行限定。如图4、图11所示,当插栓3插入通孔202中,并插入到位后,限位柱处于限位孔中的最右端,以进行限位。相应地,当插栓3从通孔202中拔出,且拔出到位后,限位柱处于限位孔中的最左端,并进行限位。
36.上述插栓3呈l形,包括竖直段301和水平段302,插栓的竖直段301穿过水平板4032,插栓的水平段302插入通孔202中。
37.在插栓的水平段302上还设置有支撑套303,在支撑套303上设置有栓孔,插栓3的水平段302从栓孔中穿过。支撑套303与外壳体101固定连接。支撑套303对插栓3起到支撑作用,并将插栓的水平段302固定在与通孔202等高的位置处,以方便插栓3从通孔202中顺畅插入与拔出。
38.如图4、图8所示,在外壳体101的内部还设置有透水舱106,在外壳体101的侧壁和底部且对应透水舱的位置处均设置有透水孔1061,以方便透水舱106中快速进水。
39.在透水舱106的顶部设置有支撑隔板107,在支撑隔板107上设置有安装孔,所述水压传感器6插入安装孔中,并将透水舱106和密封舱103分隔开。水压传感器6的下部区域置于透水舱106中,水压传感器6的上部区域置于密封舱103中。该设置方式可通过水压传感器6将密封舱103和透水舱106之间的安装孔封堵,确保了密封舱103的密封性。同时,水压传感器6可实时测定透水舱106内的水压,便于装置入水后及时探测到信号。
40.实施例5:在上述实施例1结构基础上,本发明还进行如下更为具体的设置。
41.如图2、图5所示,所述通信模块集成到控制装置5上,形成通信控制板。在密封舱103内还设置有北斗天线9和供电电源10,北斗天线9与通信控制板连接。供电电源10分别连接通信控制板和驱动装置401,用于分别为通信控制板和驱动装置提供电能。
42.北斗卫星导航定位系统除了能为船舶提供导航、定位,还可实现北斗短报文通信功能。本发明引入北斗三号系统,用于类似船舶沉船的突发情况,可以短报文的形式将报警
信息及沉船经纬度信息,发送到船舶管理中心,实现突发情况的实时报警。船舶管理中心可根据沉船经纬度快速找到沉船方位,大大缩短救援时间。
43.在外壳体101的底部设置有插接公头11,在固定体2上设置有与插接公头相适配的插接母头12。当浮离主体1与固定体2连接后,插接公头11与插接母头12对应连接在一起。插接公头11和插接母头12可采用db9公头和db9母头。
44.如图6-7所示,所述固定体2安装在船舶桅杆上。固定体2呈圆柱状,在固定体2的一侧且沿其长度方向设置有弧形凹口204,固定体的弧形凹口204与船舶桅杆的一侧相贴合。在固定体2的周向上下间隔设置有若干个抱箍槽203。连接时,先将固定体2的弧形凹口204与船舶桅杆的一侧贴合,然后采用多个抱箍进行紧固,抱箍固定于抱箍槽203中,防止上下滑动,提高紧固效果。
45.本发明沉船自动浮离报警装置中,浮离主体1主要用于北斗导航定位、短报文通信、浮离报警等功能。固定体2主要用于将整套装置固定于船舶桅杆。浮离主体1中的北斗天线9、通信控制板和供电电源10等用于北斗通信定位,插拔机构4、水压传感器6等用于遇水自动浮离。
46.上述供电电源10可采用锂电池等。
47.上述通信控制板是基于stm32f1系列的单片机控制板,嵌有北斗接收机模块,可以解析当前位置信息,亦可发送短报文信息。船舶遇险时,北斗接收机模块获取当前经纬度坐标,传给单片机,单片机将其编码为特定格式的短报文,并在报文的帧头添加沉船报警标识,编码完成后,通过北斗天线9将短报文报警信息发出。船舶管理总站接收到短报文后,解析帧头,判断这是一条沉船报警信息,会立即展开营救准备,通过经纬度信息,及时定位沉船海域,展开精确定位营救。
48.上述通信控制板上可进一步兼容声光报警装置,以在上浮到水面后进行声光报警,进一步提高搜救效率,实现精准救援。
49.实施例6:一种沉船自动浮离报警装置的工作方法,采用如实施例1-5中所述的沉船自动浮离报警装置,包括以下步骤:(1)浮离主体1和固定体2连接,固定体2的连接杆201插入浮离主体1上的连接孔104中,插栓3插入连接杆末端的通孔202中。插接公头11与插接母头12对应连接在一起。固定体2安装在船舶桅杆上。
50.(2)船舶正常航行时,通过浮离主体1上的通信控制板和北斗天线9进行导航定位。
51.(3)当船舶遇险沉船时,浮离主体1和固定体2随船体入水,水进入透水舱106中。当水压传感器6感应到水压后,会释放遇水信号给通信控制板,通信控制板控制驱动装置401运转。驱动装置401带动摆动臂402转动,摆动臂402带动移动座403移动,移动座403在移动时带动插栓3从通孔202中拔出,并在弹簧7的恢复力作用下,使得浮离主体1和固定体2相分离。
52.浮离主体1所受到的水的浮力大于自身重力,在浮力的作用下,浮离主体1会上浮至水面。
53.(4)浮离主体1上浮至水面后,通信控制板将所形成的短报文报警信息发出。
54.上述方式中未述及的部分采取或借鉴已有技术即可实现。
55.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!