一种水下航行器的行走机构-j9九游会真人
一种水下航行器的行走机构
[技术领域]
[0001]
本发明涉及水下机器人,尤其涉及一种水下航行器的行走机构。
[
背景技术:
]
[0002]
现有的水下航行器将陆上传统的履带技术用于水下行走,这种水下航行器底盘的左右两侧各有一个履带,履带与爬行表面接触,借助电机提供动力实现前进,后退,转向。借助重力或控制沉浮的推进器实现贴附。
[0003]
专利号为cn202222338517.4的实用新型公开了一种水下激光器用行走机构,其特征在于:包括本体(100)和主动轮(200),所述本体(100)的顶部中间贯穿转动连接有安装柱(110),所述本体(100)的内腔顶部中间后侧通过螺栓固定连接有第一电机(120),所述本体(100)的内腔底部前后两侧左侧均通过螺栓固定连接有第二电机(130),所述本体(100)前后侧壁左右两侧下侧均贯穿转动连接有传动轴(140),所述传动轴(140)的外端与所述主动轮(200)固定连接,前后两侧两个所述主动轮(200)之间均转动连接有平衡杆(210),前后两侧两个所述主动轮(200)外侧壁均啮合有履带(220)。
[0004]
履带式的行走机构可以方便地在船舶表面,平缓的壁面进行贴附作业。但是,海洋设施的水下部分包含大小形状不一的支架和电缆,支架杆件的表面通常有棱角,电缆的表面通常为直径较小的圆柱面。海上的风电平台需要海底电缆传输电力,排查电力传输问题需要检查海缆是否损坏,水下航行器的行走机构需要沿海缆贴附行走。但是,履带式行走机构难以适应较小的圆柱面或棱角。如在履带式的行走机构的中间留有凹槽,虽然通过时可以解决空间干涉问题,但履带内侧的边缘的受力点会产生应力集中;另外,履带直接在直棱角或圆柱面上行进还会出现滑移,无法产生贴附力。
[
技术实现要素:
]
[0005]
本发明要解决的技术问题是提供一种适合在具有棱角的表面或在较小圆柱面上行走的水下航行器的行走机构。
[0006]
为了解决上述技术问题,本发明采用的技术方案是,一种水下航行器的行走机构,包括机架、前桥和后桥,前桥包括两个驱动半桥,后桥包括两个从动半桥;机架包括纵梁,两个驱动半桥布置在纵梁前部的两侧,两个从动半桥布置在纵梁后部的两侧;驱动半桥包括驱动轮,两个驱动半桥驱动轮的轴线在同一个平面上;所述平面与纵梁轴线的夹角为45
°
~75
°
,两个驱动轮轴线的夹角小于180
°
,两个驱动轮轴线的夹角开口朝下。
[0007]
以上所述的水下航行器的行走机构,驱动轮包括外轮和内轮,内轮的直径小于外轮的直径。
[0008]
以上所述的水下航行器的行走机构,所述平面与纵梁轴线的夹角为47
°
~55
°
,两个驱动轮轴线的夹角为85
°
~95
°
;两个驱动半桥对称地布置在纵梁前部的两侧,驱动轮为胶质轮。
[0009]
以上所述的水下航行器的行走机构,驱动半桥包括支架、伺服电机、齿形带驱动装
置、驱动轴和两个轴承,齿形带驱动装置包括第一带轮、第二带轮和齿形带,伺服电机固定在支架上,第一带轮固定在伺服电机轴上,第二带轮固定在驱动轴的中部;两个轴承的内圈固定在驱动轴上,布置在第二带轮的两侧;支架的上部固定在纵梁上,支架的下部包括两个轴承座,两个轴承分别安装在支架的两个轴承座中;所述的内轮固定在驱动轴的内端,所述的外轮固定在驱动轴的外端。
[0010]
以上所述的水下航行器的行走机构,内轮为圆柱状的回转体,外轮的包括圆柱状的回转体和圆锥状的回转体,圆锥状的回转体布置在外轮圆柱状的回转体的外侧;外轮的外表面和内轮的外表面都包括防滑纹;所述的行走机构在地面上行走时,外轮的圆锥状回转体与地面接触,圆锥状回转体与地面接触部位的母线与地面平行。
[0011]
以上所述的水下航行器的行走机构,外轮直径与内轮直径之比为1.15~1.25;外轮用于在直径较大的圆柱面或角度较大的棱角上贴附行走,内轮用于在直径较小的圆柱面或角度较小的棱角上贴附行走。
[0012]
以上所述的水下航行器的行走机构,前桥包括连接板,连接板布置在纵梁的下方,两个驱动半桥的支架通过连接板连接;按行走机构的前进方向,伺服电机位于驱动轮的后方。
[0013]
以上所述的水下航行器的行走机构,后桥包括从动轴,从动半桥包括安装板和从动轮,安装板的上端固定在纵梁后部的外侧,从动轴横向穿过两个从动半桥的安装板的下端,两个从动轮分别安装在从动轴的两端。
[0014]
以上所述的水下航行器的行走机构,所述的从动轮为鼓形轮。
[0015]
以上所述的水下航行器的行走机构,爬行模式与航行模式的切换的过程如下:在爬行前,正向运转驱动桥,驱动轮与爬行表面接触的瞬间,产生贴附力和前进力,行走机构前行并依靠贴附力附着在爬行表面上;驱动轮倒转时,贴附力丧失,行走机构与爬行表面脱离,驱动轮悬空,水下航行器脱离爬行表面在水中航行。
[0016]
本发明的行走机构适合在水下具有棱角的表面或在较小圆柱面上贴附行走。
[附图说明]
[0017]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0018]
图1是本发明实施例水下航行器的行走机构的主视图。
[0019]
图2是本发明实施例水下航行器的行走机构的俯视图。
[0020]
图3是本发明实施例水下航行器的行走机构的左视图。
[0021]
图4是本发明实施例水下航行器的行走机构的仰视图。
[0022]
图5是本发明实施例水下航行器的行走机构的立体图。
[0023]
图6是本发明实施例驱动轮的主视图。
[0024]
图7是本发明实施例驱动轮的左视图。
[0025]
图8是图6中的a-a剖视图。
[0026]
图9是本发明实施例行走机构在圆柱面上行走的立体示意图。
[0027]
图10是本发明实施例行走机构在圆柱面上行走的正视示意图。
[0028]
图11是图10中的b-b剖视图。
[0029]
图12是本发明实施例行走机构在平缓的地面上行走时的主视图。
[0030]
图13是本发明实施例行走机构在平缓的地面上行走时的左视图。
[0031]
图14是图13中ⅰ部位的局部放大图。
[0032]
图15是本发明实施例行走机构出水的示意图。
[具体实施方式]
[0033]
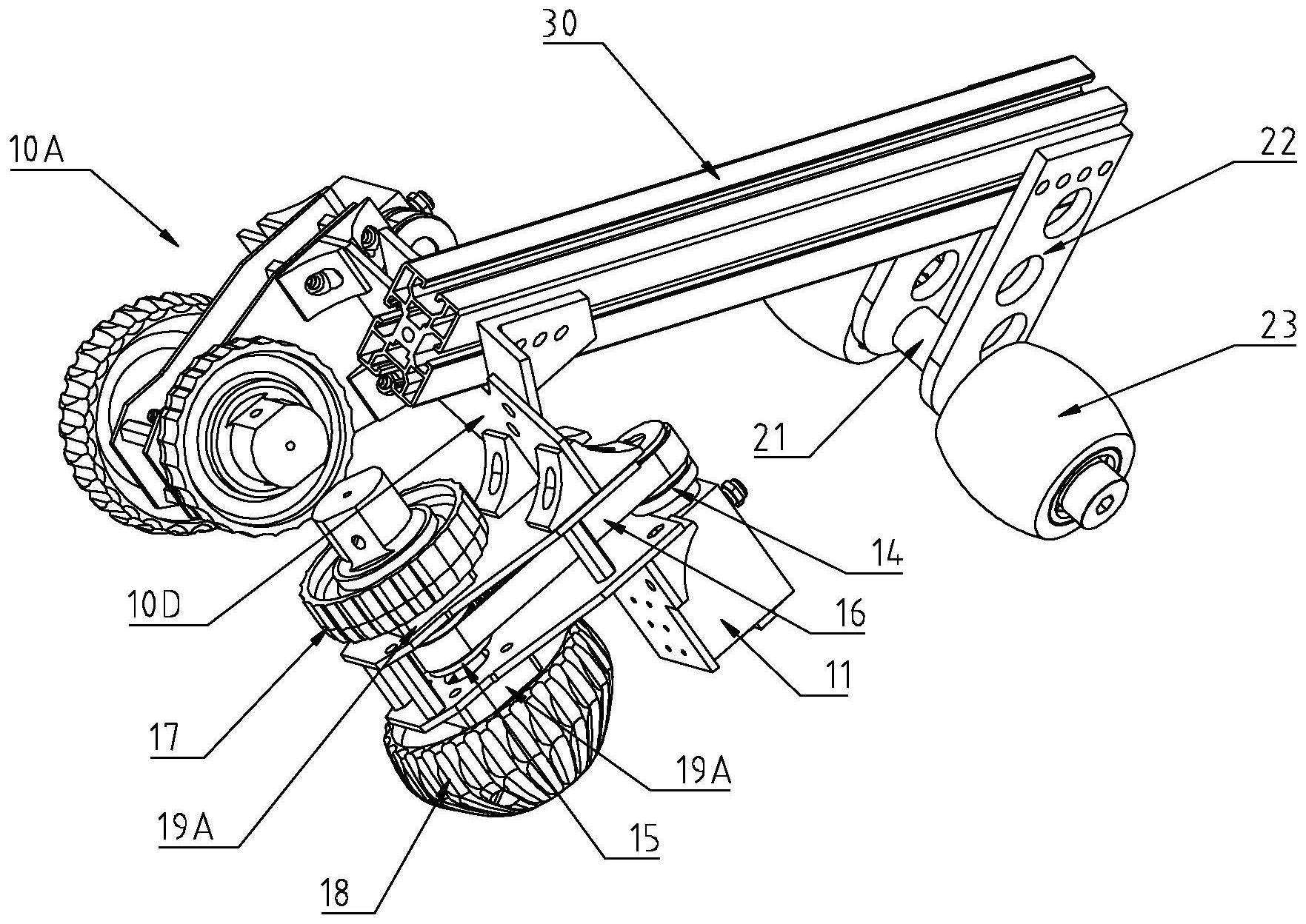
本发明实施例水下航行器行走机构的结构和原理如图1至图15所示,包括机架、前桥10和后桥20,前桥10由两个驱动半桥10a组成,后桥20由两个从动半桥20a组成。
[0034]
机架有一根纵梁30,两个驱动半桥10a对称地布置在纵梁30前部的两侧,两个从动半桥20a对称地布置在纵梁30后部的两侧。纵梁30的中部有多个安装孔31,安装孔31用于与水下航行器连接。
[0035]
驱动半桥10a包括支架19、驱动轮10b、伺服电机11、齿形带驱动装置10c、驱动轴12和两个轴承13,齿形带驱动装置10c包括第一带轮14、第二带轮15和齿形带16,伺服电机11固定在支架19上,第一带轮14固定在伺服电机11轴上,第二带轮15固定在驱动轴12的中部。两个轴承13的内圈固定在驱动轴12上,布置在第二带轮15的两侧。支架19的上部固定在纵梁30的前部,支架19的下部有两个轴承座19a,两个轴承13分别安装在支架19的两个轴承座19a中。驱动轮10b包括外轮18和内轮17,内轮17固定在驱动轴12的内端,外轮18固定在驱动轴12的外端。按行走机构的前进方向,伺服电机11位于驱动轮10b的后方,行走机构的前进阻力较小。
[0036]
内轮17为圆柱状的回转体,外轮18的包括圆柱状的回转体181和圆锥状的回转体182,外轮18圆锥状的回转体182布置在外轮18圆柱状的回转体181的外侧。外轮18的外表面和内轮17的外表面都有防滑纹。
[0037]
内轮17的直径小于外轮18的直径,外轮18直径d1与内轮17直径d2之比为1.2。
[0038]
前桥10有一块连接板10d,连接板10d布置在纵梁30的下方,两个驱动半桥10a支架19的中部通过连接板10d连接。
[0039]
两个驱动半桥10a驱动轮10b的轴线在同一个平面m-m上。两个驱动半桥的驱动轮10b轴线所在的平面m-m与纵梁30轴线的夹角α为45
°
~90
°
,两个驱动轮10b轴线的夹角β小于180
°
,两个驱动轮10b轴线n-n的夹角β开口朝下。
[0040]
在本实施例中,两个驱动半桥的驱动轮10b轴线所在的平面m-m与纵梁30轴线的夹角α为51
°
,两个驱动轮10b轴线的夹角β为90
°
。
[0041]
后桥20有一根从动轴21,从动半桥20a有一块安装板22和一个从动轮23,从动轮23为鼓形轮。
[0042]
安装板22的上端固定在纵梁30后部的外侧,从动轴21是一根通轴,横向穿过两个从动半桥20a的安装板22的下端,两个从动轮23分别通过轮毂轴承安装在从动轴21的两端。
[0043]
如图9至图11所示,圆柱体60的轴线方向为x轴方向,圆柱体60的横向为y轴方向,圆柱体60的径向为z轴方向。行走机构在圆柱体60的圆柱面上行进时,驱动轮表面凸起的防滑纹压破驱动轮与爬行表面之间的水膜,与爬行表面产生软接触,在伺服电机的驱动下驱动轮旋转,并在接触部位产生动摩擦力。
[0044]
如图9所示,本发明实施例行走机构沿圆柱体60的轴向行进时,驱动轮10b外轮18圆柱状的回转体181在爬行过程中与圆柱体60接触产生的摩擦力f与外轮18圆柱状回转体
181下部接触点的周边相切,摩擦力f与爬行方向(x方向)偏移了一个夹角γ,由此产生摩擦力的三个分力fx、fy和fz,贴附力fz的大小大致是夹角γ的正弦值乘摩擦力f大小,推进力fx大小是该夹角γ的余弦值乘摩擦力f大小,通过该估算方法,本发明以上实施例前进的分力fx接近摩擦力f大小的90%,而垂直分力fx接近摩擦力f的20%到40%。两个驱动半桥驱动轮产生的横向力fy相互平衡。贴附力fz使本发明实施例行走机构在行进时贴附在圆柱体60上,不易被水流冲走。
[0045]
驱动轮10b的内轮17用于在直径较小的圆柱体上或杆件表面棱角小于90
°
的表面上行走。驱动轮的外轮不适合行走在直径较小的圆柱体表面或支架杆件棱角小于90
°
的表面,驱动轮10b的内轮17因在驱动轮的内侧,且直径较小,能够与直径较小的圆柱体表面或棱角小于90
°
的支架杆件的表面良好接触,保持爬行的稳定。
[0046]
本发明实施例的行走机构两个驱动轮10b轴线的夹角β为90
°
,当在直径较小的圆柱体上或杆件表面棱角小于90
°
的表面上行走时,两个驱动半桥驱动轮和两个从动半桥的传从动轮将圆柱体的突出部分或突棱棱角的突出部分夹在中间,可以限制行走机构的侧向滑移。
[0047]
驱动轮10b外轮18的圆锥状回转体182用于在平缓的地面上行走。如图12至图14所示,当行走机构在较为平缓的地面70上行走时,外轮18的圆锥状回转体182与地面70接触,圆锥状回转体182与地面接触部位的母线与地面基本平行。两个驱动半桥10a和两个从动半桥20a配合,实现在在平缓的地面上行走。
[0048]
除此之外,本发明实施例航行器的行走机构能够实现自主上岸下水。上岸时如图15所示,通过航行器本身的推进器和两个驱动半桥10a驱动轮的摩擦力共同作用,使其上岸时可以以一定速度v移动,下水的过程同理。
[0049]
本发明实施例航行器的行走机构能够实现爬行模式与航行模式的快速切换:在爬行前,正向运转驱动桥,驱动轮与爬行表面接触的瞬间,即产生贴附力和前进力,行走机构开始前行,并依靠贴附力附着在爬行表面上。驱动轮倒转时,贴附力丧失,行走机构立刻与爬行表面脱离,驱动轮悬空使航行器能够在水中自由航行。
[0050]
本发明以上实施例航行器的行走机构为水下航行器可拆装的动力滚轮模组,用于海洋设施水中表面部分的贴附作业,在保留了于平缓表面的爬行功能的基础上,能在水下直径280mm以下圆柱表面和具有直棱角的表面的贴附行进,通过接受朝向爬行面的摩擦分力,具备良好的贴附能力以抵抗水流干扰。本发明以上实施例结构简单紧凑,重量较轻,性能可靠。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!