用于安防巡逻机器人的射击机构的制作方法-j9九游会真人
1.本实用新型涉及安防机器人技术领域,具体而言涉及用于安防巡逻机器人的射击机构。
背景技术:
2.我国的安防巡逻工作主要靠人力来实现,人力资源要求高且有一定的安全隐患;尤其是在火车站、医院、广场、商场等人员密集地,需要投入大量人力进行监督,但由于近年来对于流行病的加强管控,密集人员会增加接触风险,而安防机器人具有人力所不具有的优势,例如可以大量布置,且不存在感染的风险。
3.目前的安防机器人普遍具有双向语音对话、声光报警功能,但是缺乏进一步应对突发事件的能力,尤其是高灵活性和高制服能力,而这是代替人力安防巡逻的重要条件之一,因此,如何提高安防机器人的高制服能力是本实用新型所要解决的问题。
技术实现要素:
4.本实用新型提出一种用于安防巡逻机器人的射击机构,包括:
5.旋转台,连接到车架;
6.发射系统,连接到所述旋转台,能相对于所述旋转台转动;
7.供弹系统,连接到所述车架,用于向所述发射系统供弹;
8.其中,所述旋转台用于驱动所述发射系统绕所述旋转台的轴线转动,转动角度为360
°
,所述供弹系统包括第一供弹通道,所述旋转台包括第二供弹通道,所述发射系统包括发射通道,所述第一供弹通道的入口端设有间歇供料部件,用于向所述第一供弹通道内间歇性的输送弹药,所述第二供弹通道的入口端与所述第一供弹通道的出口端连接,所述发射系统被配置为将所述发射通道内的弹药发射出去。
9.优选的,所述发射通道包括s型通道段、速度控制段和直线通道段,在所述速度控制段设有一对加速轮,所述加速轮能相对于所述发射通道转动,且所述加速轮包括处于所述发射通道内的部分,当处于发射通道内的球形弹药与加速轮表面接触后,被施加沿直线通道段方向的预定初速度。
10.优选的,一对所述加速轮沿所述直线通道段的轴线呈对称分布,且所述加速轮的轴线垂直于所述直线通道段的轴线。
11.优选的,所述间歇供料部件包括槽轮驱动电机、槽轮和底板,所述供弹系统还包括储弹仓,槽轮驱动电机的驱动轴顶部延伸至所述储弹仓的底端,所述槽轮驱动电机的驱动轴被构造成伞形,在所述槽轮驱动电机的驱动轴与所述储弹仓的底部之间形成仅供一颗弹药通过的通道,所述槽轮连接到所述槽轮驱动电机的驱动轴,所述槽轮与底板之间形成多个储存弹药的转运空间,每个转运空间仅容纳一颗弹药。
12.优选的,所述旋转台的底部设有挡板,所述挡板至少遮住一个转运空间,在所述挡板的下方设有过渡笼,由所述槽轮、过渡笼构成第一供弹通道,所述过渡笼的第一端对接到
旋转台下方的转运空间。
13.优选的,所述旋转台内设有送弹管,所述s型通道段包括s型输送笼,所述s型输送笼的第一端连接到所述送弹管,所述速度控制段和直线通道段包括发射枪头,所述s型输送笼的第二端连接到发射枪头,所述s型输送笼能相对于所述送弹管转动,所述旋转台内设有用于驱动s型输送笼相对于送弹管转动的驱动部件。
14.优选的,所述驱动部件包括转动电机、传动带、带轮,所述带轮连接到所述s型输送笼底部的外壁,所述带轮的轴线与所述送弹管的轴线重合,所述传动带套在所述带轮与所述转动电机的输出端,所述转动电机与所述带轮通过传动带传动连接。
15.优选的,所述s型输送笼的底部设有轴承,所述旋转台设有圆形的槽口,所述轴承设置在所述s型输送笼外壁与所述旋转台的槽口之间。
16.优选的,所述发射枪头和所述s型输送笼之间通过水平的转轴铰接,使所述发射枪头能进行俯仰角度的变化,所述发射枪头靠近所述s型输送笼的位置设有弧形连接板,所述弧形连接板设有弧形槽,所述s型输送笼上设有限位柱,所述限位柱处于所述弧形槽中,以限制所述发射枪头俯仰的角度。
17.优选的,所述s型输送笼的外部设有俯仰电机,所述俯仰电机的输出端连接摆臂的第一端,所述摆臂的第二端连接到发射枪头,用于控制所述发射枪头的俯仰姿态。
18.与现有技术相比,本实用新型的优点在于:
19.本实用新型的提出的射击机构,包括供弹、旋转台和发射系统,通过旋转台连接供弹和发射系统,可保持发射系统在360
°
的转动状态下仍具有发射能力,即在复杂环境下仍可以对目标人员进行持续的控制,尤其提高了安防机器人的制服能力,解决一线安防人员工作强度大、近距离接触交叉感染风险、快速部署麻烦等问题,有效地节约了人力资源。
附图说明
20.附图不意在按比例绘制。在附图中,在各个图中示出的每个相同或近似相同的组成部分可以用相同的标号表示。为了清晰起见,在每个图中,并非每个组成部分均被标记。现在,将通过例子并参考附图来描述本实用新型的各个方面的实施例,其中:
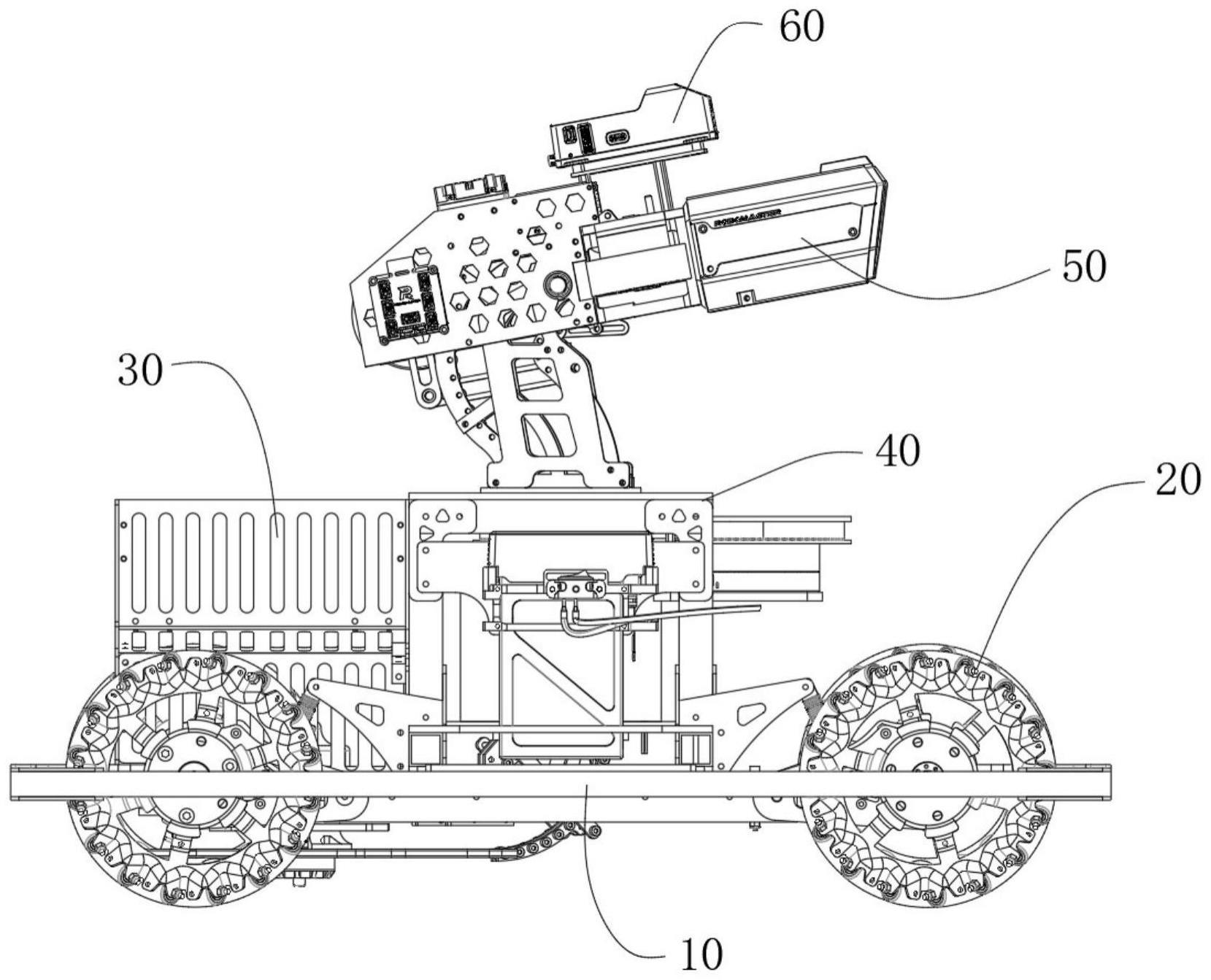
21.图1是本实用新型所示的射击机构安装到安防机器人的侧视图;
22.图2是本实用新型所示的射击机构安装到安防机器人的立体图;
23.图3是本实用新型所示的储弹仓的结构示意图;
24.图4是本实用新型所示的射击机构的俯视图;
25.图5是本实用新型所示的射击机构的剖视图;
26.图6是本实用新型所示的供弹系统的结构示意图;
27.图7是本实用新型所示的供弹系统的剖视图。
具体实施方式
28.为了更了解本实用新型的技术内容,特举具体实施例并配合所附图式说明如下。
29.基于目前安防巡逻机器人的局限性,例如通常带有的报警、喊话、识别等功能,缺乏对可疑人员的约束制服作用,尤其是在目标人员有逃跑或闯卡的动机时,目前的安防巡逻机器人几乎没有拒止和约束能力,本实用新型旨在提高安防机器人在发现目标人员后的
处理能力和手段,增加机器人对于安防人员的可替代作用,以起到解放人力的目的。
30.结合图1-4所示,本实用新型提出一种用于安防巡逻机器人的射击机构,包括旋转台40、发射系统50和供弹系统30,其中,机器人还包括车架10、机器视觉系统60等,四个麦克纳姆轮20安装到车架10,四个麦克纳姆轮20被设置为独立驱动,旋转台40连接到车架10;发射系统50连接到旋转台40,并能相对于旋转台40转动;供弹系统30连接到车架10,用于向发射系统50供弹。
31.进一步的,机器视觉系统60连接到发射系统50,用于获取发射系统50前方的实时画面;供电系统70用于向四个麦克纳姆轮20、旋转台40、发射系统50、供弹系统30以及机器视觉系统60供电。
32.如此,通过车架10 四个麦克纳姆轮20的配置可提高机器人的灵敏性,尤其是提高机器人的横移能力和大范围的转动能力,在小区域内有利于机器视觉系统60锁定目标人员,发射系统50和旋转台40的设置能在横移能力和大范围的转动能力的基础上,保持发射系统50持续的锁定目标人员,保持对目标人员的输出能力,以达到拒止和约束能力。
33.进一步的,如何保证弹药的持续性输出,尤其是在各种转动条件以及姿态下的输出性能,是保证持续对目标输出的基础,因此,旋转台40用于驱动发射系统50绕旋转台40的轴线转动,转动角度为360
°
,供弹系统30包括第一供弹通道,旋转台40包括第二供弹通道,发射系统50包括发射通道。
34.其中,第一供弹通道、第二供弹通道以及发射通道将连通弹仓和射出区域,尤其是第一供弹通道、第二供弹通道能在发射系统50发生转动以及俯仰动作时,保持畅通的输送属性。
35.具体的,第一供弹通道的入口端设有间歇供料部件,用于向第一供弹通道内间歇性的输送弹药,这种供弹方式能保证按需供给的可靠性,即用一发动一次供一发。
36.在可选的实施例中,本技术中所示的弹药为球形弹药,其中,球形弹药包括外皮以及由外皮包裹的芯材,可以理解的,根据不同的任务类型,其中的外皮和芯材可以是不同材质和厚度,本实用新型并不对其进行限制。
37.例如,当执行消防任务时,其芯材可选是阻燃剂,投入到火场中起到灭火作用,当执行安防任务时,其芯材可选是粘黏剂,当弹药击中目标人员时,利用粘黏剂的粘黏作用,迟滞或抑制目标人员的运动能力,直至将目标人员制服。
38.进一步的,第二供弹通道的入口端与第一供弹通道的出口端连接,发射通道包括s型通道段、速度控制段和直线通道段,通过s型通道段的设置,能对接第二供弹通道,使发射通道具有倾角变化而弹药不堵塞的条件。
39.进一步的,在速度控制段设有一对加速轮52,加速轮52能相对于发射通道转动,且加速轮52包括处于发射通道内的部分,当处于发射通道内的球形弹药与加速轮52表面接触后,被施加沿直线通道段方向的预定初速度,利用加速轮52表面与弹药表面的接触摩擦的相互作用,赋予弹药一个初速度,使弹药射出去击中目标,通过控制加速轮52的转速,可控制弹药的初速度,即可控制弹药的射程、击中力度等,有利于根据不同环境,针对性的赋予弹药不同的能力。
40.在优选的实施例中,一对加速轮52沿直线通道段的轴线呈对称分布,且加速轮的轴线垂直于直线通道段的轴线,通过这种布局,两个加速轮52对球形弹药的相互作用是均
衡的,不至于因球形弹药局部受力而造成飞行时的旋转,在射出的轨迹上呈现出向左、右或向过分向上、下的弧形,因此,射出的轨迹是自然下落的,这有利于计算出弹药的击中范围,提高命中率。
41.在可选的实施例中,结合图5-7所示,间歇供料部件包括槽轮驱动电机342、槽轮34和底板33,供弹系统30还包括储弹仓31。
42.其中,储弹仓31是框型结构,其旨在容纳弹药,提高机器人的载弹能力,而当较多的球形弹药放置在框型结构的储弹仓31中时,若相互的挤压很容易造成弹药不能可靠的下落被送入到供弹通道中。
43.因此,槽轮驱动电机342的驱动轴顶部延伸至储弹仓31的底端,槽轮驱动电机342的驱动轴被构造成伞形,在槽轮驱动电机342的驱动轴与储弹仓31的底部之间形成仅供一颗弹药通过的通道。
44.如此,槽轮驱动电机342顶部的伞形驱动轴将储弹仓31的底部构造成逐渐收窄的环形槽结构,这样弹药之间即使相互挤压,而底部是下滑的斜面,球形的弹药必然会顺着斜面滑道环形槽中,并且环形槽的宽度仅容纳一颗弹药,使弹药有序的排布。
45.进一步的,槽轮34连接到槽轮驱动电机342的驱动轴,槽轮34与底板33之间形成多个储存弹药的转运空间341,每个转运空间仅容纳一颗弹药。
46.由于槽轮34具有良好的分隔能力,且能保证每次向输送通道中输送一颗弹药,底板33对弹药的底部进行承托,槽轮34将底板33上的弹药分隔,形成稳定的间隔输送机构。
47.进一步的,为了保证槽轮34每转动到特定的位置时,该处转运空间341的弹药能被送入到供弹通道中,在旋转台40的底部设有挡板,挡板至少遮住一个转运空间341,即在此处的转运空间341不会从上方掉落弹药进来,在挡板的下方设有过渡笼35,过渡笼35上有伸入到该处转运空间341的挡板,可以理解的,这个挡板不会干扰槽轮34的转动,因此,每当槽轮34周围的转运空间341转动到这个位置时,挡板就将转运空间341内的弹药推到过渡笼35中,向过渡笼35中持续的供弹,而当下一个弹药再被送入过渡笼35中后,前一个弹药被后一个弹药所挤压,即向上提升一个高度,直至达到加速轮52的位置。
48.结合上述的,由槽轮34、过渡笼35构成了第一供弹通道,且过渡笼35的第一端对接到旋转台40下方的转运空间341,用于将转运空间341内的弹药过渡到过渡笼35中。
49.结合图6所示,旋转台40内设有送弹管36,s型通道段包括s型输送笼53,s型输送笼53的第一端连接到送弹管36,速度控制段和直线通道段包括发射枪头51,s型输送笼53的第二端连接到发射枪头51,s型输送笼53能相对于送弹管36转动,旋转台40内设有用于驱动s型输送笼53相对于送弹管36转动的驱动部件。
50.为了保证可靠性,s型输送笼53、发射枪头51以及送弹管36被构造成刚性部件,其中,为了适配发射枪头51的俯仰姿态,即在发射枪头51俯仰动作时,不会对输送通道内的弹药造成挤压,s型输送笼53内的通道被构造成s型,避免出现直角的,使通道顺滑,尤其是s型输送笼53与发射枪头51的连接部分,铰接点与加速轮52的间距固定,这样,当发射枪头51相对于s型输送笼53转动时,加速轮52与将要发射的弹药的间距是固定的。
51.在可选的实施例中,发射枪头和s型输送笼之间通过水平的转轴铰接,使发射枪头能进行俯仰角度的变化,发射枪头靠近s型输送笼53的位置设有弧形连接板56,弧形连接板56设有弧形槽,s型输送笼53上设有限位柱,限位柱处于弧形槽中,以限制发射枪头51俯仰
的角度。
52.发射枪头51和s型输送笼53沿铰接轴运动时,弧形连接板56中的弧形槽在限位柱的表面滑动,如此,虽然发射枪头51的俯仰角度变化了,但是铰接处与加速轮52的间距不变,因此,在俯仰变化时,不会影响发射能力。
53.进一步的,s型输送笼53的外部设有俯仰电机54,俯仰电机54的输出端连接摆臂55的第一端,摆臂55的第二端连接到发射枪头51,用于控制发射枪头51的俯仰姿态。
54.在具体的实施例中,俯仰电机54转动时,摆臂55绕俯仰电机54的轴转动,通过连接摆臂55的连杆带动发射枪头51发生俯仰运动,可更好的锁定目标人员。
55.进一步的,为了赋予机器人更大的灵活性,例如持续的绕目标人员转圈的发射能力,驱动部件包括转动电机42、传动带43、带轮44,带轮44连接到s型输送笼53底部的外壁,带轮44的轴线与送弹管36的轴线重合,传动带43套在带轮44与转动电机42的输出端,转动电机42与带轮44通过传动带43传动连接。
56.如此,当转动电机42输出端的小带轮带动传动带43转动时,可使带轮44发生转动,使发射枪头51绕旋转台40的轴线转动,并且在连续的转动过程中,s型输送笼53和送弹管36连接处的空间并没有变化,因此不影响供弹。
57.在优选的实施例中,s型输送笼53的底部设有轴承,旋转台40设有圆形的槽口,轴承设置在s型输送笼53外壁与旋转台40的槽口之间。
58.如此,可增加s型输送笼53与旋转台40之间的承载能力,尤其是径向抗压性,即使受到目标人员的攻击,仍保持转动的可靠性。
59.在上述的实施例中,车架10包括车体11和防撞框12,防撞框12设置在车体11的外围,车体11上设有支撑臂13,麦克纳姆轮20通过悬臂15连接到车体11,且悬臂15与支撑臂13之间设有减震器14,悬臂15、支撑臂13和减震器14呈三角形分布,防撞框12包围在麦克纳姆轮20的外侧。
60.如此,防撞框12在麦克纳姆轮20的外围,对麦克纳姆轮20形成保护,麦克纳姆轮20由于其本身具有的灵活性特征,配置四轮独立驱动以及减震,保证发射枪头51能应对复杂地形保持对目标人员的锁定。
61.在具体的实施例中,在巡检准备阶段,安防人员需将本机器人放在平稳的地面上,电源开关打开后,机器视觉系统60将第一人称视角实时画面传到电脑,安防人员可通过电脑、遥控器等操作端进行操作,当操作端发出操作指令,指令传递到单片机,单片机运行freertos的多线程任务,通过合理的串级pid来平稳地控制相应的电机运动从而实现相应的功能。
62.麦克纳姆轮式的底盘可以通过对各个麦克纳姆轮进行不同的控制,从而实现不同方向上的平移,能够为机器人提供更加便捷的移动,更有利于机器人对目标进行追踪,通过旋转台40以及发射枪头51的俯仰,可实现机器人的云台与底盘的独立控制,即机器人在保持云台单独控制,更稳定地瞄准目标。
63.机器视觉系统60收集到的画面发送到操作端后,可进行录制并上传至官方系统,对行人进行人脸识别并与系统人脸信息比对,当发现危险份子时可发送警报给公安人员;人脸识别系统还能对行人口罩佩戴进行识别和监督,对疫情期间未佩戴口罩的行人通过图传模块的扬声器进行语音提醒。
64.当巡检现场出现危险情况时,安防人员可通过远程操控,对危险份子进行劝告,或发射警示弹对危险份子进行有效的控制;其中,通过加速轮52将警示弹发射出去,机器视觉系统60中的测速模块会对发射的警示弹进行测速,将速度信息传至操作端,供操作者参考,操作者可通过改变摩擦轮的发射速度,从而改变警示弹的威力。
65.结合以上实施例,本实用新型的提出的射击机构,包括供弹、旋转台和发射系统,通过旋转台连接供弹和发射系统,可保持发射系统在360
°
的转动状态下仍具有发射能力,即在复杂环境下仍可以对目标人员进行持续的控制,尤其提高了安防机器人的制服能力,解决一线安防人员工作强度大、近距离接触交叉感染风险、快速部署麻烦等问题,有效地节约了人力资源。
66.虽然本实用新型已以较佳实施例揭露如上,然其并非用以限定本实用新型。本实用新型所属技术领域中具有通常知识者,在不脱离本实用新型的精神和范围内,当可作各种的更动与润饰。因此,本实用新型的保护范围当视权利要求书所界定者为准。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!