组装压力机工具支架的制作方法-j9九游会真人
1.本发明涉及一种压力机工具支架。本发明还涉及一种包括这种工具支架的压力机。本发明还涉及一种操作这种工具支架的方法。
背景技术:
2.钉入是钟表领域中公知的技术。其通常借助于压力机或类似物来实施,该压力机包括被设计为向第一部件施加对抗放置在压力机的框架上的第二部件的力的工具,以使第一部件和第二部件的结构彼此穿透。该工具通常是与第一部件的几何形状匹配的专用工具,并且其是可更换的,以实现所有类型的部件在相同的压力机或类似物上的组装。因此例如在同一天中可能要求操作者频繁地更换工具来执行不同范围的组装。
3.这种更换工具的操作被证明是繁琐的,因为需要长时间地保持和/或操作工具来将其正确地安装在工具支架上,例如通过螺纹连接。频繁重复的工具更换最后会产生操作者肌肉骨骼疾病(msd)的风险。
4.文件jp6713010b2公开了一种现有技术的代表性方案,其中手动压力机的工具通过螺钉被固定至工具支架。该螺钉在与工具的纵向轴线垂直的方向上拧紧在工具支架上,使得其端部可向所述工具施加径向力并因此将其保持在形成在工具支架上的容纳部内。安装工具的操作因此要求在螺纹连接步骤期间将工具保持在工具支架中。操作者因此必须在安装操作期间同时拧紧螺钉和将工具保持在工具支架中。
5.将工具直接拧紧在工具支架上也是公知的。为此,工具包括被设计为与工具支架上的阴螺纹配合的阳螺纹,反过来也是一样。在这种情况下,操作者需要操作、特别是旋转和平移可能是沉重的工具,并且在有限的空间内进行这种操作。
6.文件ep3424645b1本身公开了一种卡扣类型的方案,其特别适于使用用于将可更换的工具连接至便携式压力装置的耦合件。为此,可更换的工具特别是包括嵌套元件,其被设计为在工具被引入到工具支架中并且在其中旋转时与工具支架的保持元件配合。嵌套元件和保持元件分别相对于工具和工具支架固定。因此,受到操作者影响的操作、特别是工具的旋转实现嵌套元件与保持元件的配合。
技术实现要素:
7.本发明的目的是提供一种能够改进现有技术中公知的工具支架的工具支架。特别地,本发明提出了一种能够简单、可靠且快速地将工具固定至工具支架的工具支架。
8.根据本发明的工具支架由权利要求1限定。
9.工具支架的实施方式由权利要求2至10限定。
10.根据本发明的工具由权利要求11限定。
11.根据本发明的压力机由权利要求12限定。
12.根据本发明的操作方法由权利要求13限定。
13.操作方法的实施方式由权利要求14和15限定。
附图说明
14.附图通过举例的方式表示根据本发明的压力机的一个实施方式。
15.图1是压力机的一个实施方式的立体图。
16.图2是压力机在工具支架的层面上的细节视图。
17.图3是工具支架的俯视图。
18.图4是工具支架的俯视图,示出了工具支架的元件(图3中不可见)。
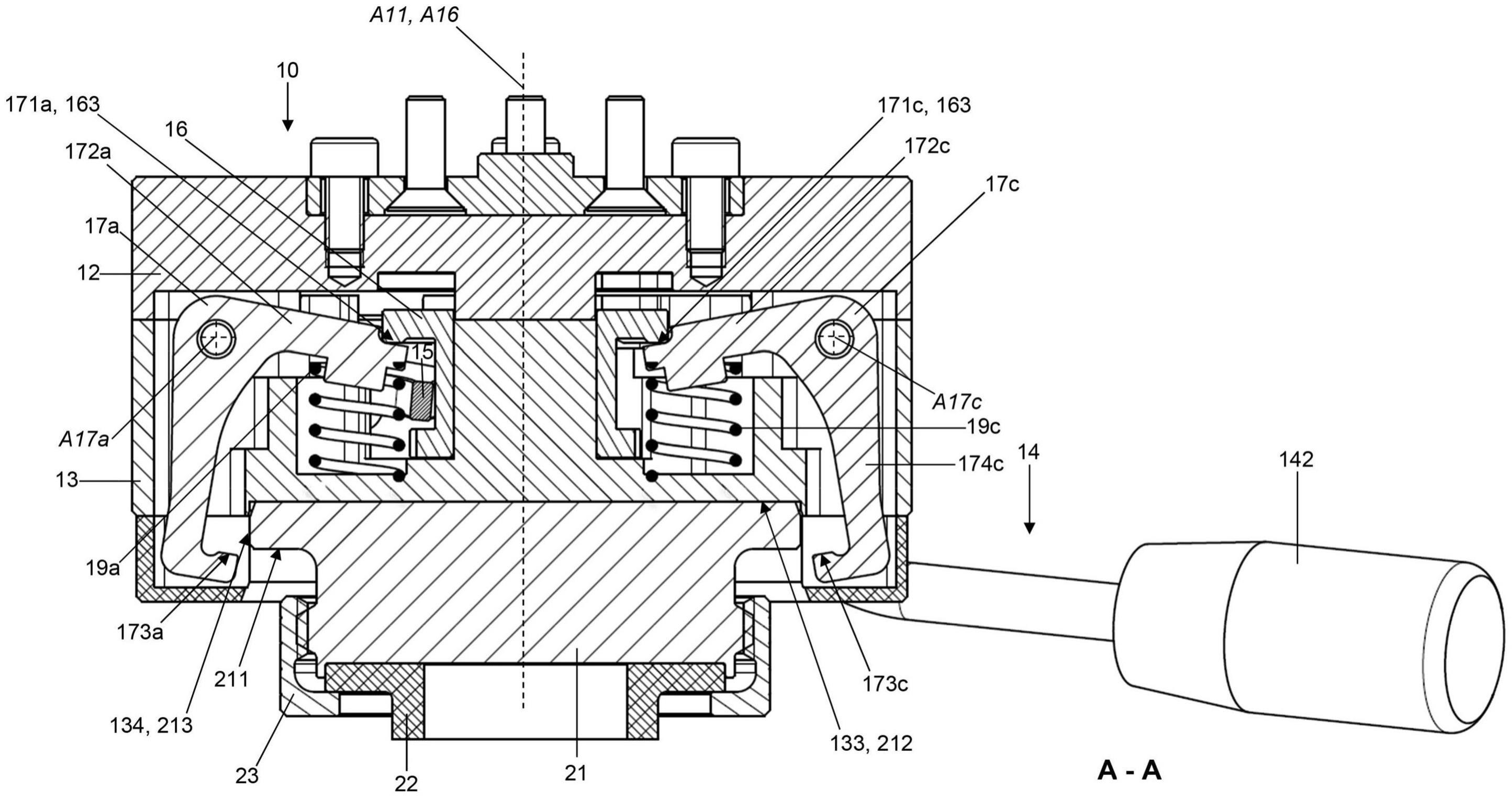
19.图5是工具支架在图3中的平面a-a上的纵向剖面的视图,工具支架的保持元件处于启用位置。
20.图6是工具支架在图3中的平面b-b上的纵向剖面的视图,工具支架的保持元件处于启用位置。
21.图7是工具支架在图3中的平面c-c上的纵向剖面的视图,工具支架的保持元件处于启用位置。
22.图8是工具支架在图3中的平面c-c上的纵向剖面的视图,工具支架的保持元件处于停用位置。
23.图9是工具支架在图3中的平面a-a上的纵向剖面的视图,工具支架的保持元件处于停用位置。
具体实施方式
24.在下文中参考附图、特别是参考图1和2描述根据本发明的压力机100的一个实施方式。
25.压力机100(或类似物)被设计为用于实现沿着纵向轴线a100将第一部件1钉入到第二部件2中。特别地,钉入操作包括使其中一个部件的第一结构穿入到、特别是强制地穿入到另一个部件的第二结构中。
26.为了执行钉入操作,压力机通过工具20、特别是通过钉入环22向第一部件1施加力。该力被传递至第二部件2,随后传递至将第二部件2设置在其上的支架98、随后传递至将支架98设置或固定在其上的压力机100的框架99。
27.钉入环22特别是能够:
28.确保第一部件在钉入期间的良好定位、特别是良好定向;并且
29.限制第一部件上的巨大压力的区域以防止将其划伤。
30.支架98特别是能够:
31.确保第二部件在钉入期间的良好定位、特别是良好定向;并且
32.限制第二部件上的巨大压力的区域以防止将其划伤。
33.压力机100包括工具支架10和工具20。工具20通过工具支架被安装在压力机100上。
34.图2示出了其中安装有工具20的工具支架10的细节的视图。工具支架10被固定、特别是拧紧在集成在压力机100中的滑动件97上。该滑动件97特别是包括具有圆柱形形状的主体,其具有与轴线a100一致的几何轴线a97。
35.图1中的粗箭头表示的滑动件97沿着轴线a100朝向支架98的平移运动导致工具20在定位在第二部件2上之前朝向第一部件1移动,直到工具20与第一部件1接触为止,之后通
过将第一部件1钉在第二部件2上来实现组装。
36.滑动件97沿着轴线a100的平移运动的速度和对其施加的力能够定义第一部件在第二部件上的强制的和/或位置钉入或第一部件在第二部件上的抵接钉入。
37.压力机100优选是组装压力机,即特别是通过钉入过程来实现第一部件和第二部件的组装的压力机或类似物。图1中示出的压力机100是自动压力机,特别是伺服压力机,即设置有伺服马达(电动马达和控制系统)的压力机。替代地,压力机100可以是手动压力机,即利用由操作者提供的能量的压力机。
38.图3示出了工具支架10和工具20的俯视图并且确定了用于截取图5至9所示的多个纵向(相对于工具支架的轴线a11)剖面的多个平面。
39.图4示出了与图3相同的俯视图,但是露出了工具支架10的部件。
40.工具支架10具有:
41.轴线a11并且包括:
42.致动构件14;以及
43.适于保持工具20的保持元件17a、17b、17c、17d。
44.工具支架被构造和/或设置为使得保持元件17a、17b、17c、17d可通过致动构件14在第一方向上的运动、特别是通过致动构件14在第一方向上的初级(elementary)运动而从启用位置移动到停用位置。
45.轴线a11优选在工具支架10被安装在压力机100上时与轴线a97和a100一致。
46.特别地,图3和4清楚地示出了工具支架10的致动构件14,其在此在垂直于滑动件97的轴线a97或垂直于与工具支架10的容纳部11的几何轴线对应的轴线a11的平面中被围绕轴线a14旋转地铰接,容纳部11特别是被设计为用于接收工具支架10的部件,如图5至9所示。
47.在这种形式的构造中,致动构件14具有弯曲形状。致动构件14包括:
48.安装有致动把手142的臂或杠杆141;以及
49.围绕轴线a14铰接的柄143。
50.部件141和143通过连接元件144以垂直或基本垂直的方式彼此互连或固定。致动构件、特别是杠杆141可通过操作者特别是向下手动驱动。
51.如上所述,为了将保持元件17a、17b、17c、17d从启用位置移动到停用位置,只要以初级运动的方式移动致动构件14:
52.在单一的方向上从第一抵接到第二抵接;以及
53.旋转或平移。
54.在所表示的实施方式中该运动是旋转。旋转运动的大小优选小于20
°
或10
°
,特别是约为5
°
。
55.替代地,该运动可以是平移运动。平移运动的大小优选小于100mm或50mm。
56.操作者可优选使用单一的操作或单一的动作来执行从第一抵接到第二抵接的初级运动。例如,该动作是操作者的手的动作,该动作是基本上直线或曲线的。操作者优选无需进行操作来实现从第二抵接到第一抵接的返回运动。这种返回优选通过弹性返回力来进行。
57.两个连续的平移运动的组合,特别是在不同方向上的两个连续的平移运动的组合
不是初级运动。两个连续的旋转的组合,特别是在不同方向上的两个连续的旋转的组合不是初级运动。旋转和平移的连续的组合不是初级运动。
58.特别是在图4中可见,柄143包括叉15,其例如通过将其拧紧到形成在所述柄上的平坦部145(在图7、8中可见)上而被固定。该叉15被设计为与具有中空圆柱形形状的、具有与容纳部11的轴线a11同轴的轴线a16的凸轮16配合。这种配合使得凸轮16可由于叉15的运动而移动、特别是平移。作为这种构造形式的替代,柄143和叉15可以是一体的。
59.容纳部11例如由上框架12和下框架13形成,它们特别是通过螺钉123、特别是八个螺钉123、尤其是四对螺钉123(在图3中可见)固定在一起。
60.凸轮16优选被引导为沿着轴线a11至少平移,这一方面归因于形成在下框架13上的具有轴线a11的第一凸榫131与所述凸轮16的贯通开口161的配合,另一方面归因于形成在上框架12上的具有轴线a11的第二凸榫121与所述开口161的配合(在图5至9中可见)。该凸轮因此可在相对于轴线a16具有滑动和枢转连接部的情况下被安装在框架12、13上。
61.此外,凸轮16在其外周部上包括槽,其在其每个纵向端部处限定了第一承载表面162和第二承载表面163。第一承载表面162被设计为与叉15的叉形端部151配合(特别是在图4中可见),而第二承载表面163被设计为例如通过进行直接接触来驱动保持元件17。
62.在工具支架的这个实施方式中,保持元件的数量为四个并且采用优选相同的夹爪17a、17b、17c、17d的形式,它们被设计为与工具20配合来将其保持在工具支架10的容纳部11中,这可以在图5至7中看到。
63.保持元件17a、17b、17c、17d具有弯曲形状或l形。每个保持元件特别是通过相应的销18a、18b、18c、18d(在图4中可见)在其弯曲部的水平处围绕相对于轴线a11正交径向地设置的相应的轴线a17a、a17b、a17c、a17d被旋转地铰接。这些轴线因此位于与工具支架10的轴线a11垂直的一个或多个平面中。这些夹爪优选围绕轴线a11均匀地分布。特别地,销18a、18b、18c、18d相对于轴线a11正交径向地设置并且优选围绕轴线a11均匀地分布。
64.这些夹爪17a、17b、17c、17d各自包括被设计为特别是通过直接接触而与凸轮16的第二承载表面163配合的承载表面171a、171b、171c、171d以及被设计为与工具20配合的承载表面173a、173b、173c、173d。
65.承载表面171a、171b、171c、171d和173a、173b、173c、173d优选平行或基本上平行。
66.承载表面171a、171b、171c、171d形成在相对于轴线a11径向地定向(在保持元件的启用位置中)的第一夹爪部分172a、172b、172c、172d的一个端部处,而承载表面173a、173b、173c、173d形成在与第一部分172a、172b、172c、172d垂直或基本垂直地设置的第二部分174a、174b、174c、174d的一个端部处。
67.这些夹爪17a、17b、17c、17d有利地特别是彼此独立地抵住凸轮16、特别是抵住凸轮16的第二承载表面163被弹性地偏置。夹爪17a、17b、17c、17d例如通过独立的相同或不同的弹簧19a、19b、19c、19d被偏置,特别地,这些弹簧的返回力可以是相同或不同的。这种设计有利地能够使夹爪17a、17b、17c、17d独立地与工具20配合。保持元件17a、17b、17c、17d因此可通过凸轮16相对于它们相应的轴线移动。
68.此处,这些弹簧19a、19b、19c、19d具有螺旋形状。它们有利地平行于轴线a11设置。它们优选位于下框架13的承载表面132与每个第一夹爪部分172a、172b、172c、172d、特别是这些第一部分中的每一个上的能够定位弹簧的端部并防止它们偏斜的突起175a、175b、
175c、175d之间。
69.在工具支架10的第一构造中,这些弹簧19a、19b、19c、19d与夹爪17a、17b、17c、17d之间的配合能够将工具20保持在容纳部11中。图5、6和7示出了这种第一、所谓的操作构造。保持元件随后处于启用位置。
70.在所表示的实施方式中,工具20具有一种几何形状、特别是承载表面212、承载表面211和外周部213,其被构造为与工具支架10配合。特别地,工具20包括:
71.支撑件21;以及
72.钉入环22。
73.钉入环22固定至支撑件21。被构造为与工具支架10配合的几何形状优选位于支撑件21上。
74.图5和6特别是示出了夹爪17a、17b、17c、17d的相应的承载表面173a、173b、173c、173d,它们各自与工具20的支撑件21的承载表面211配合,以将所述支撑件21的承载表面212压紧在框架13的承载表面133上,承载表面211和承载表面212优选是平行的。这些承载表面133、212被设计为用于传递压紧力。致动构件14和叉15自身通过经由夹爪17a、17b、17c、17d在框架12的方向上被弹簧19a、19b、19c、19d弹性地偏置的凸轮16被保持到位。在这个第一构造中,承载表面171a、171b、171c、171d和承载表面173a、173b、173c、173d有利地垂直于轴线a11,以防止工具20从工具支架10上拆下的任何风险。在这个第一构造中,工具20有利地通过支撑件21的外周部213与形成在框架13中的容纳部134或者安装在框架13上的部件的配合而在容纳部11中居中(特别是可在图8中看到)。外周部213和容纳部134优选具有互补的圆柱形形状。
75.图8示出了构件14的驱动阶段,特别是把手142的“向下”驱动阶段,导致柄143及其叉15围绕轴线a14在顺时针方向上旋转,如图8中的实线箭头所示。这种旋转驱动凸轮16对抗弹簧19a、19b、19c、19d的作用而朝向框架13平移移动。这继而导致夹爪17a、17b、17c、17d围绕它们相应的轴线a17a、a17b、a17c、a17d旋转,以使它们能够远离工具20、特别是远离支撑件21移动。
76.图9举例示出了从支撑件21缩回后的夹爪17a和17c,即,处于保持元件、特别是夹爪停用的位置。它们相应的位置能够限定工具支架10的第二构造,称为安装/拆卸构造。在这个第二构造中,承载表面173a和173c特别是远离承载表面211,以允许表面133和212移动并因此使工具20能够从工具支架10上拆下。此处,这个第二构造通过下压把手142来实现,因为后者经由凸轮16和叉15经受弹簧19a、19b、19c、19d各自施加的返回力。一旦已经释放了把手142,其就因此由于这些弹簧的作用而返回到其“高”位,这导致柄143及其叉15围绕轴线a14在逆时针方向上旋转,如图8中的虚线箭头所示。致动构件14因此特别是经由将致动构件14和弹性元件19a、19b、19c、19d运动地连接的凸轮16被弹性元件19a、19b、19c、19d弹性地偏置。因此,操作者无需操作工具支架20来返回到操作构造、即保持元件处于启用位置的构造。
77.在下文中描述根据本发明的操作工具支架的方法的一个实施方式。
78.该操作方法包括移除先前安装在工具支架10中的工具20的以下步骤:
79.通过操作者使致动构件14在第一方向上移动、特别是在致动构件14的第一方向上进行初级移动的步骤,该步骤导致:
80.通过移动的步骤停用保持元件17a、17b、17c、17d以释放所述工具20的步骤。
81.移动致动构件14的步骤是在第一方向上从第一位置移动到第二位置的步骤,特别是致动构件14在第一方向上旋转以到达工具支架的第二构造并因此允许拆卸先前安装在工具支架10的容纳部11中的工具20。
82.为了将新的工具20安装在没有工具的工具支架10中,操作方法包括与使保持元件进入停用位置(并且在工具支架中具有任何工具的情况下移除工具)的上述步骤连续的以下步骤:
83.将保持元件17a、17b、17c、17d保持在停用位置的步骤;
84.将工具20引入到工具支架10中的步骤;
85.使致动构件14在与第一方向相反的第二方向上移动的步骤,特别是在致动构件的第二方向上进行初级移动的步骤。这种运动优选在操作者释放致动构件14时通过弹性返回元件19a、19b、19c、19d来进行。这种第二方向上的运动将工具支架重新构造为操作构造,使保持元件进入到它们的启用位置。工具支架10因此被构造和/或设置为使得保持元件可通过在与致动构件14的第一方向相反的第二方向上的运动、特别是通过致动构件14的第二方向上的初级运动而从停用位置移动到启用位置。
86.替代地,为了将新的工具20安装在没有工具的工具支架10中,操作方法在保持元件处于启用位置的情况下包括以下步骤:
87.使工具20与工具支架10接触的步骤;
88.使工具20向工具支架10施加力以使保持元件17a、17b、17c、17d缩回并将工具20放置在工具支架10中的步骤;以及
89.使弹性返回元件19a、19b、19c、19d驱动保持元件17a、17b、17c、17d的步骤。
90.为了执行缩回操作,工具和保持元件优选具有能够在通过工具20在工具支架10上施加轴向力(沿着轴线a11)时使保持元件对抗弹簧倾斜的倒角表面或凸轮表面。因此能够在不用事先操作致动构件的情况下将工具引入到工具支架的容纳部中。然而,在这种情况下,保持元件的运动导致致动构件的运动(在没有额外的离合系统的情况下)。因此,工具支架被构造和/或设置为使得保持元件可通过停用位置从一个启用位置(没有工具)移动到另一个启用位置(工具就位)。从启用位置(没有工具)到停用位置的移动由工具在工具支架上施加力来实现。从停用位置到启用位置(工具就位)的移动由弹性返回元件的作用产生。
91.因此,致动构件在第一方向上的运动导致保持元件分离,反过来也是一样。此外,致动构件在与第一方向相反的第二方向上的运动导致保持元件被紧固。
92.在所述的实施方式中,致动元件在与工具支架的容纳部的几何轴线垂直的一个或多个平面中围绕旋转轴线铰接。然而,作为替代,致动构件和/或保持元件可围绕与工具支架的容纳部的几何轴线平行或基本平行的旋转轴线铰接。例如,保持元件可通过与虹膜光圈的叶片相同的方式设置。在这种情况下,致动构件例如可以围绕工具支架的容纳部的几何轴线旋转地移动。
93.更一般来说,致动构件和/或保持元件可通提供过任何类型的运动来移动,例如平移运动。
94.除了保持元件之外,工具支架和/或工具可包括保险装置,以确保工具相对于工具支架和/或工具相对于第一部件的正确角定向。
95.在所述的实施方式中,滑动件97经由其自身的板96通过螺钉122、特别是四个螺钉122(在图3和5中可见)固定至框架12而通过螺纹连接固定至工具支架10。当然,也可使用任何其他的组装方案。
96.在所述的实施方式中,工具包括支撑件21、被设计为与第一部件1接触的钉入环22以及被设计为特别是通过螺纹连接而将钉入环22固定至支撑件21的组装环23。为此,支撑件21在外壁上包括被设计为与组装环23的接收部分中的内螺纹配合的外螺纹。当然,工具20也可采用任何其他形式。例如,其可以是一体式的。替代地,其可采用更复杂的组件的形式并且特别是包括被设计为吸收钉入力的一个或多个弹簧。
97.第一部件1和第二部件2优选是钟表部件。在第一个例子中,第一部件可以是诸如表圈盘的外部部件并且第二部件可以是诸如表圈环的外部部件。在第二个例子中,第一部件可以是诸如水晶(可能包括密封件)的外部部件并且第二部件可以是诸如中壳(可能包括密封件)的外部部件。第一部件和第二部件可以相同地采用机芯的部件的形式。在第三个例子中,第一部件可以是齿轮并且第二部件可以是轴杆。在第四个例子中,第一部件可以是宝石并且第二部件可以是机芯半成品。
98.在所述的实施方式中,压力机是用于钉紧两个部件、特别是两个钟表部件的压力机。完全能够在压力机中使用这种工具支架来实现两个部件的铆接或压接。
99.在所述的实施方式中,工具支架被设计为由操作者来操作。由于其构造,其可等同地且有利地由自动装置来操作。例如,该装置可包括与致动构件14直接或间接地互相接合的马达、特别是马达轴。特别地,该马达可借助于诸如按钮的辅助控制器由操作者启动。这种方案根据压力机的构造或环境可以是特别有利的。自动装置实现了致动构件的操纵自动化。
100.因此,本发明不限于具有可手动操纵的致动构件14的工具支架。
101.上述的方案具有包括致动构件和保持元件的特定特征,这些保持元件被设计为能够根据致动构件的简单操作而将工具安装在工具支架上或从其上拆下。
102.特别地,致动构件在第一方向上的运动导致保持元件彼此远离的运动,因此能够将工具从工具支架上拆下,而致动构件在与第一方向相反的第二方向上的运动导致保持元件被收紧并且因此能够将工具保持或安装在工具支架上。
103.第一方向可以是图8中的实线箭头所示的顺时针方向,并且第二方向可以是图8中的虚线箭头所示的逆时针方向。替代地,第一方向可以是逆时针方向并且第二方向是顺时针方向。
104.所述的方案通过提出一种一方面能够最佳地简化工具的安装和拆卸操作并且另一方面将所述操作所需时间减至最少的工具支架而在针对压力机或类似物更换工具的操作期间提高了用户的舒适度。
105.如上所述,保持元件在至少一个方向上的运动有利地通过致动构件的运动来实现,这与需要进行工具和/或工具支架的运动来实现保持元件的运动的现有技术中公知的方案有所不同。换句话说,保持元件可通过致动构件的运动而相对于工具支架移动。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!