一种吸附分离装置的制作方法-j9九游会真人
1.本实用新型涉及吸附分离装置领域,更具体地说,它涉及一种用于吸附片状体并进行分离搬运动作的吸附分离装置。
背景技术:
2.目前的印刷电路板(pcb)为了具有多层线路的结构,主要会利用压合技术将每一层蚀刻线路堆栈成一多层板结构,而层与层之间通常会利用pp(prepreg,半固态片)进行接合,pp的材质包含玻纤布、树脂、硬化剂、速化剂、溶剂及填充剂,故整体呈现软质态样,于制程中,会先制成一大型片状体,经由切割成特定规格后再由输送带输送并堆栈。
3.然而,因为pp整体结构薄且软,故经由输送带的尾段输送至推叠位置的过程中,容易产生无法准确定位的情况,换言之,各pp无法整齐的堆栈,如此必须再对已堆栈的各pp进行整理后再执行制程中的下一步骤,这样不但会延长制程时间也会增加成本,因此需要提出一种新的方案来解决这个问题。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种吸附分离装置,各吸盘组件可相对于底座移动,达到各吸盘组件可同步进行吸取工件及相对移动的目的。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种吸附分离装置,其特征在于:包括底座、导轨、多个滑台以及多个吸盘组件,所述导轨固设于所述底座上,所述滑台安装在所述导轨上且可沿所述导轨移动,所述吸盘组件包括固设在滑台上的固定座、安装在固定座上的吸头以及用于驱动吸头进行吸气的动力源。
6.在其中一个实施例中,每个所述滑台上的所述吸盘组件的数量为多个,且所述多个吸盘组件呈间隔设置,每个所述滑台上的多个吸盘组件分别设置在滑台相对的两端。
7.在其中一个实施例中,所述底座具有一纵向方向和一横向方向,所述纵向方向和横向方向相互垂直,所述底座为长片体且朝向所述横向方向延伸,所述吸盘组件的固定座朝向所述纵向方向延伸,所述吸头设置为若干个,若干个所述吸头朝向所述纵向方向间隔排列。
8.在其中一个实施例中,所述多个滑台分别为一左滑台、一中滑台及一右滑台,所述中滑台位于左滑台和右滑台之间,所述左滑台、中滑台和右滑台均为朝向所述横向方向延伸的长片体。
9.综上所述,本实用新型具有以下有益效果:工作时,将本实用新型安装在机械手臂上,利用机械手臂移动底座,并通过各滑块的滑动将各吸盘组件分别对准各工件并进行吸取动作,吸取工件并上移后,朝向前方向移动,在移动的过程中,各滑台之间可通过相对滑动来增加个工件之间的间距,移动至堆栈位置后再下移堆栈,重复以上动作,达到将各工件精准堆栈的目的,相较于现有技术而言,可达到精准定位且自动化增加各工件之间间距的效果,避免了各工件之间产生重叠或由于距离过近不便于下一工序中对各工件进行提取的
情况。
附图说明
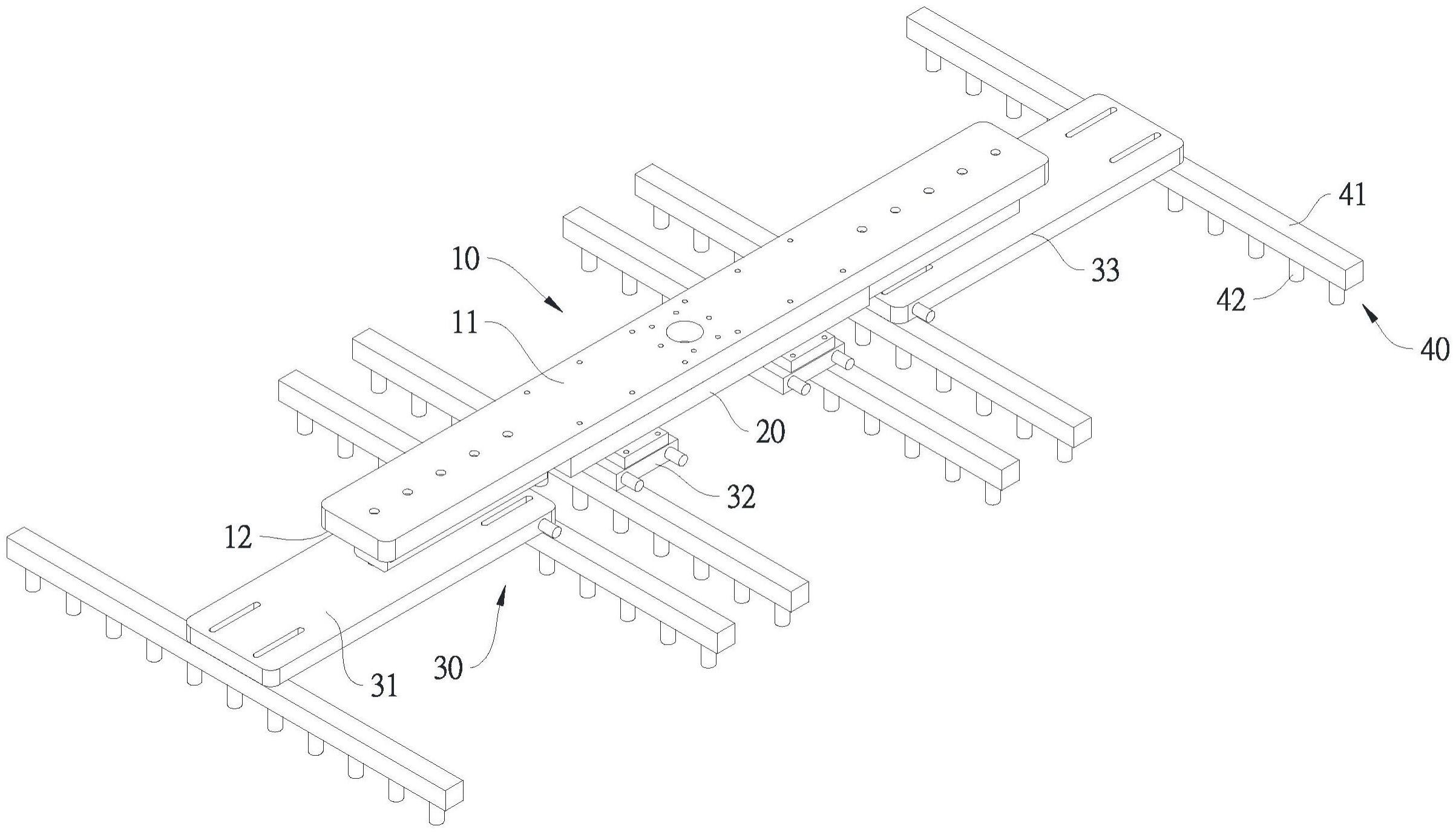
10.图1为本申请的实施例的吸附分离装置的结构示意图;
11.图2为本申请的实施例的吸附分离装置的俯视图;
12.图3为本申请的实施例的吸附分离装置的主视图;
13.图4为本申请的实施例的吸附分离装置的侧视图;
14.图5为本申请的实施例的吸附分离装置的使用示意图。
15.图中:10、底座;11、顶面;12、底面;20、导轨;30、滑台;31、左滑台;32、中滑台;33、右滑台;40、吸盘组件;41、固定座;42、吸头;50、工件。
具体实施方式
16.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
17.请参阅图1所示,本申请的实施例提供了一种吸附分离装置,包括底座10、导轨20、多个滑台30以及多个吸盘组件40。所述导轨20固设于所述底座10上,所述滑台30安装在所述导轨20上且可沿所述导轨20移动,滑台30包括内置的用于驱动滑台30在导轨20上移动的气缸气动组件,其中气缸气动组件采用现有技术,其内部构造在本实施例中不再赘述。所述吸盘组件40包括固设在滑台30上的固定座41、安装在固定座41上的吸头42以及用于驱动吸头42进行吸气的动力源(未图示),所述动力源采用现有技术,在本实施例中不在赘述,所述固定座41为长条体。
18.本实施例中,请参阅图2和图3所示,所述底座10具有一纵向方向和一横向方向,所述纵向方向和横向方向相互垂直,所述底座10为长片体且朝向所述横向方向延伸,所述吸盘组件40的固定座41朝向所述纵向方向延伸,所述吸头42设置为若干个,若干个所述吸头42朝向所述纵向方向间隔排列,具体的,所述纵向方向为底座10的短边方向,所述横向方向为底座10的长边方向,所述底座10包括顶面11和底面12,所述顶面11和底面12上下相对设置。
19.请参阅图2至图4所示,所述导轨20固设于底座10的底面12,导轨20沿底座10的横向方向延伸。
20.本实施例中,每个所述滑台30上的所述吸盘组件40的数量为多个,且所述多个吸盘组件40呈间隔设置,每个所述滑台30上的多个吸盘组件40分别设置在滑台30相对的两端。
21.具体的,两个吸盘为一组地固设于同个滑台30的相对的两个端部,可以理解的是吸盘组件40的数量和安装位置不限于此,可以根据使用需求做改变。
22.本实施例中,所述多个滑台30的数量为三个,三个滑台30分别为一左滑台31、一中滑台32及一右滑台33,所述中滑台32位于左滑台31和右滑台33之间,所述左滑台31、中滑台32和右滑台33均为朝向所述横向方向延伸的长片体。
23.具体的,左滑台31固定于导轨20上,中滑台32及右滑台33可相对于左滑台31移动,但不以此为限,滑台30的形式及数量可根据使用者需求作改变。
24.本实用新型使用时,请参阅图1及图5所示,以安装于机械手臂(图中未示意)上为例说明,但不以此为限,机械手臂具有一延伸杆连接于底座10的顶面11,工件50为pp纤维片,各工件50为一大型片体经过切割为三片的状态,利用机械手臂移动底座10,并通过各滑块的滑动将各吸盘组件40分别对准各工件50并进行吸取动作,吸取工件50并上移后,朝向前方向移动,在移动的过程中,左滑台31维持不动,中滑台32及右滑台33同步向远离左滑台31的一侧移动一段距离,使得各工件50之间的间距增加,移动至堆栈位置后再下移堆栈,重复以上动作,达到将各工件50精准堆栈的目的,相较于现有技术而言,可达到精准定位且自动化增加各工件50之间间距的效果,避免了各工件50之间产生重叠或由于距离过近不便于下一工序中对各工件50进行提取的情况。
25.需要说明的是,前述过程中,滑台30的数量不限于三个,当滑台30数量为两个时,其中一个滑台30可设置为固定式,另一个滑台30设置为可移动式。
26.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种吸附分离装置,其特征在于:包括底座(10)、导轨(20)、多个滑台(30)以及多个吸盘组件(40),所述导轨(20)固设于所述底座(10)上,所述滑台(30)安装在所述导轨(20)上且可沿所述导轨(20)移动,所述吸盘组件(40)包括固设在滑台(30)上的固定座(41)、安装在固定座(41)上的吸头(42)以及用于驱动吸头(42)进行吸气的动力源。2.根据权利要求1所述的吸附分离装置,其特征在于:每个所述滑台(30)上的所述吸盘组件(40)的数量为多个,且所述多个吸盘组件(40)呈间隔设置,每个所述滑台(30)上的多个吸盘组件(40)分别设置在滑台(30)相对的两端。3.根据权利要求1或2所述的吸附分离装置,其特征在于:所述底座(10)具有一纵向方向和一横向方向,所述纵向方向和横向方向相互垂直,所述底座(10)为长片体且朝向所述横向方向延伸,所述吸盘组件(40)的固定座(41)朝向所述纵向方向延伸,所述吸头(42)设置为若干个,若干个所述吸头(42)朝向所述纵向方向间隔排列。4.根据权利要求3所述的吸附分离装置,其特征在于:所述多个滑台(30)分别为一左滑台(31)、一中滑台(32)及一右滑台(33),所述中滑台(32)位于左滑台(31)和右滑台(33)之间,所述左滑台(31)、中滑台(32)和右滑台(33)均为朝向所述横向方向延伸的长片体。
技术总结
本实用新型公开了一种吸附分离装置,涉及吸附分离装置领域,其技术方案要点是:包括底座、导轨、多个滑台以及多个吸盘组件,所述导轨固设于所述底座上,所述滑台安装在所述导轨上且可沿所述导轨移动,所述吸盘组件包括固设在滑台上的固定座、安装在固定座上的吸头以及用于驱动吸头进行吸气的动力源。本实用新型可达到精准定位且自动化增加各工件之间间距的效果,避免了各工件之间产生重叠或由于距离过近不便于下一工序中对各工件进行提取的情况。不便于下一工序中对各工件进行提取的情况。不便于下一工序中对各工件进行提取的情况。
技术研发人员:胡涛 李俊贤 吴信煌
受保护的技术使用者:苏州领遥自动化科技有限公司
技术研发日:2023.04.04
技术公布日:2023/10/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!