用于对抗车轮单元意外复位的方法与流程-j9九游会真人
1.本专利申请涉及用于对抗拟装载在机动车辆上的车轮单元的意外复位的方法,该车轮单元根据多种不同的操作模式操作,并且包括与存储器相关联的电池。
背景技术:
2.已知机动车辆出于安全目的而配备有监测系统,首字母缩略词为“tpms”(“tyre pressure monitoring system”的英语缩写,胎压监测系统)。
3.这种监测系统通常包括中央计算单元和称为“车轮单元”的电子装置。
4.每个车轮单元配备在车辆的一个关联车轮上,并且射频通信组件确保每个车轮单元与中央计算单元之间的通信。
5.每个车轮单元包括传感器,以便特别是检测车轮的异常。这些传感器可以例如是轮胎充气压力传感器、温度传感器以及车轮加速度传感器。
6.此外,每个车轮单元包括电池和关联存储器。
7.车轮单元根据其用途采用不同的操作模式,例如在车轮单元的工厂制造阶段期间采用的制造模式、在车轮单元的交付阶段期间采用的交付模式以及当车轮单元安装在处于停止状态的车辆的车轮上时采用的静止模式。
8.车轮单元可以采用其他操作模式,特别是当配备有车轮单元的车辆正在行驶时的操作模式。
9.车轮单元可经历复位,更具体地,称为“冷复位”的硬件复位或称为“热复位”的软件复位。
[0010]“冷复位”是由电池电压低于某一阈值(例如1.7伏)引起的,或由车轮单元的供电暂时中断引起的,例如在车轮单元受到静电放电的情况下。
[0011]“热复位”则是在非常特殊的情况下引起的,例如在车轮单元实施的软件出现无限循环的情况下。
[0012]
这两种类型的复位的共同结果是车轮单元的寄存器复位、车轮单元的“ram”型易失性存储器复位、以及车轮单元实施的软件复位。
[0013]
对于上述类型的车轮单元的实施方法观察到的问题在于,在车轮单元复位的情况下返回默认模式。
[0014]
实际上,在车轮单元复位的情况下,易失性存储器被擦除,并且车轮单元恢复默认模式,通常是其静止模式。复位突然发生的模式不考虑在内。
[0015]
这种策略会带来问题,因为在变为默认模式(这里是静止模式)之外的模式时发生的车轮单元复位会产生向很可能不适合车轮单元的使用情景的这种静止模式的转变。
[0016]
不过,冷复位主要出现在电磁兼容性测试期间,特别是在静电放电测试期间,在此期间,车轮单元通常采用制造模式,因为这种模式最适合在电磁兼容性测试期间执行诊断。
[0017]
车轮单元的这种行为模式可能会在车轮单元的设计验证过程中引发失败,因为车轮单元的该行为模式会因采用的操作模式不当而改变。
[0018]
这种行为模式还使测试结果的分析变得复杂,因为很难分辨操作模式的改变是由复位还是其他原因引起的。
[0019]
在车轮单元复位的情况下的这种向默认模式的转变还会影响其他使用情况,例如车轮单元的制造、车轮单元在制造商或第三方的存储、车轮的组装、以及最后在发生故障的情况下对车轮单元的分析。
技术实现要素:
[0020]
本发明尤其目的在于通过提出一种车轮单元实施方法来解决这些缺陷,该方法使得能够避免或限制由车轮单元的复位引起的干扰和改变。
[0021]
本发明的另一目的在于为了车轮单元的诊断而促进对车轮单元的冷复位的分析。
[0022]
通过用于对抗拟装载在机动车辆的车轮上的车轮单元的意外复位的方法而实现了这些目的以及在阅读后面的描述时将变得显而易见的其他目的,所述车轮单元根据多种不同的操作模式操作,并且包括与至少一个非易失性存储器相关联的电池和由所述电池供电的至少一个传感器,其特征在于,所述方法至少包括:-更新步骤,旨在更新至少一个标识变量并将其记录在所述存储器中,所述至少一个标识变量用于标识在通过分析由所述至少一个传感器提供的数据而自动执行的车轮单元复位的情况下要应用的操作模式,以及-恢复步骤,其在车轮单元复位的情况下执行,并且迫使车轮单元转变为与在前面的更新步骤期间记录的至少一个标识变量相关联的操作模式。
[0023]
该特征使得车轮单元能够在意外复位的情况下采用适合情况的操作模式,而不是默认操作模式。
[0024]
按照根据本发明的方法的单独采用或组合采用的其他可选特征:-该方法包括计数步骤,在于对车轮单元经历的复位次数进行计数并将其写入所述存储器。该特征有利于在出问题的情况下对车轮单元的分析和诊断;-在应用于根据至少三种不同操作模式操作的车轮单元的方法的更新步骤期间,取决于车轮单元当前采用的操作模式,第一标识变量变为假或真状态,并且第二标识变量变为假或真状态,这两个标识变量的状态的组合使得能够记录各自与所述操作模式之一相关联的至少三个不同组合。该特征使得能够以有限的存储仅用两个指示位来记录在复位的情况下要应用的操作模式;-车轮单元的三种操作模式包括:对应于车轮单元的生产阶段的至少一个第一制造模式、对应于车轮单元的交付阶段的至少一个第二交付模式、以及对应于车轮单元的利用阶段的至少一个第三静止模式;-车轮单元消耗的电池能量随车轮单元采用的操作模式而变化;-车轮单元的所述复位可因外部电磁场而产生;-在更新步骤期间,如果由传感器测得的周围环境温度在存储器的预定操作范围内,则将所述至少一个标识变量记录在存储器中。该特征使得能够避免在不合适的温度条件下写入存储器时出现故障的风险。
[0025]
本发明还涉及机动车辆,其包括至少一个实施上述方法的车轮单元。
附图说明
[0026]
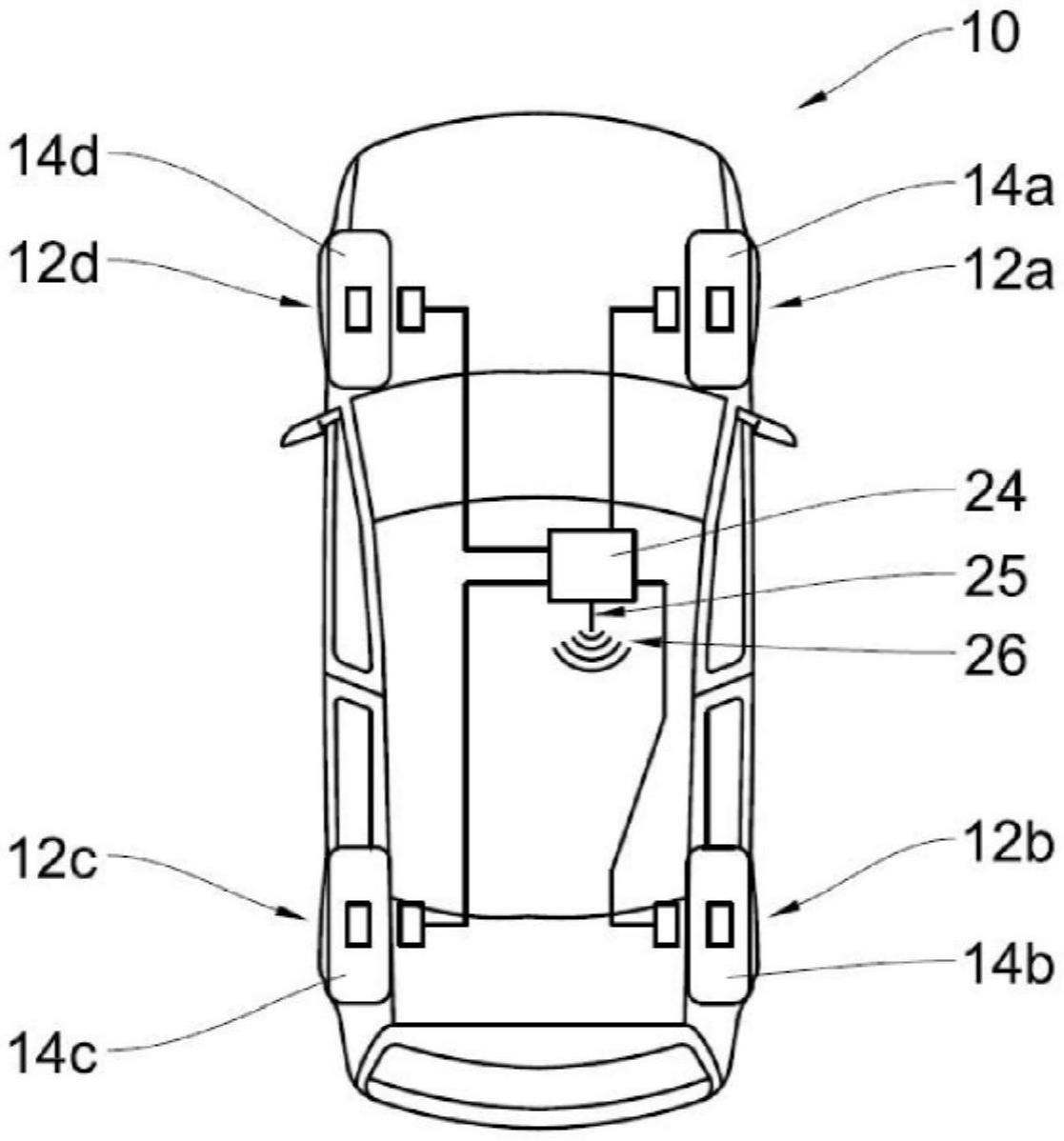
参考附图,通过阅读接下来的描述,本发明的进一步特征和优点将变得显而易见,附图图示了:-图1:配备有实施根据本发明的方法的车轮单元的机动车辆的示意性俯视图;-图2:示出图1的车轮单元的示意性剖视图;-图3:示出实施根据本发明的方法的车轮单元的行为模式的流程图。
[0027]
为了更清楚起见,在所有附图中,相同或相似的元素标有相同或相似的附图标记。
具体实施方式
[0028]
图1示出了配备有“tpms”(“tyre pressure monitoring system”的英语缩写,胎压监测系统)型监测系统的机动车辆10。
[0029]
更具体地,机动车辆10配备有四个车轮单元12a、12b、12c、12d,每个车轮单元安装在机动车辆10的一个关联车轮14a、14b、14c、14d上。
[0030]
为了清楚起见,在说明书的其余部分中仅描述附图标记为12a的车轮单元。
[0031]
车轮单元12a包括电子外壳,其中装有一组传感器,例如用于关联车轮14a的温度传感器17a和胎压传感器17b,如图2所示。
[0032]
车轮单元12a还包括计算装置18、电池20和非易失性存储器22。
[0033]
存储器22具有存储多个二进制元(通常称为“位”)的能力。
[0034]
优选地,存储器22是闪存,使得即使在复位期间供电中断,记录在存储器22中的元也不会丢失。
[0035]
车轮单元12a通过射频通信系统26与安装在机动车辆10上的中央单元24通信。
[0036]
车轮单元12a在其寿命期间根据多种不同的操作模式操作,每种操作模式根据车轮单元12a的即时使用情况来满足需求。
[0037]
根据图3所示的实施例,车轮单元12a根据三种操作模式操作,即所谓的制造模式1、所谓的交付模式2和所谓的静止模式3,所述制造模式1在关联电池20焊接好之后开始初始化车轮单元12a。
[0038]
当车轮单元12a离开制造工厂时,为了交付给第三方,车轮单元12a采用交付模式2。
[0039]
当车轮单元12a安装在关联车轮上并且关联机动车辆10处于停止状态时,车轮单元12a采用静止模式3。
[0040]
本发明更具体地涉及用于对抗车轮单元12a意外复位的方法。
[0041]“复位(r
é
initialisation)”既理解为称为“冷复位”的硬件复位也理解为称为“热复位”的软件复位。
[0042]
在非常特殊的情况下会导致热复位,特别是在车轮单元12a实施的软件出现故障的情况下,例如在软件出现无限循环的情况下。
[0043]
冷复位例如由车轮单元12a的供电暂时中断引起,特别是由于可以静电放电为特征的外部电磁场。
[0044]
这种由外部电磁场引起的复位尤其可能在进行电磁兼容性测试或抗辐射测试时发生。
[0045]
对车轮单元12a的电磁兼容性测试通常是在车轮单元12a采用制造模式1时在实验室中进行的。
[0046]
同样,车轮单元12a在其在机动车辆10的关联车轮14a上的最终使用期间(其对应于静止模式3)也可能经历静电放电。
[0047]
作为非限制性示例,冷复位也可能由电池意外断连、热保护、电池欠压、存储器22故障或软件复位引起。
[0048]
根据本发明,该方法包括更新步骤,旨在更新两个标识变量并将其记录在车轮单元12a的存储器22中,所述标识变量用于标识在车轮单元12a复位的情况下要应用的操作模式。
[0049]
这两个标识变量由第一指示位a和第二指示位b形成,这两个指示位可以各自采用假或真状态。
[0050]
作为非限制性示例,这两个标识变量可以用软件变量来代替,所述软件变量能够采用三种不同状态,每种状态对应于车轮单元12a的三种操作模式之一。
[0051]
参考图3,第一指示位a和第二指示位b的假或真状态分别对应于“0”或“1”状态。
[0052]
两个指示位a、b的状态的组合使得能够记录至少三个不同的组合,每个组合与上述操作模式之一相关联。
[0053]
此外,该方法包括恢复步骤,其在车轮单元12a复位的情况下执行,并迫使车轮单元12a转变为与在先前的更新步骤期间记录的指示位a、b相关联的操作模式。
[0054]
更新步骤由车轮单元12a在车轮单元12a的寿命的各种时期执行。
[0055]
更具体地,在通过焊接而连接了电池20和计算装置18之后,在车轮单元12a的初始化阶段期间,首次执行第一更新步骤。
[0056]
该第一阶段对应于制造模式1,并且指示位a、b均记录为0或假,如图3所示。
[0057]
在车轮单元12a采用制造模式1时发生复位的情况下,执行恢复步骤,并且车轮单元12a恢复为与指示位a、b相关联的制造模式1,如图3中的虚线箭头所示。
[0058]
在制造了车轮单元12a之后,车轮单元12a变为交付模式2。
[0059]
与此同时,再次执行第一更新步骤,并且指示位a、b分别记录为1和0。
[0060]
在车轮单元12a采用交付模式2时发生复位的情况下,执行恢复步骤,并且车轮单元12a恢复为与指示位a、b相关联的交付模式2,如图3中的虚线箭头所示。
[0061]
当车轮单元12a从交付模式2变为静止模式3时,再次执行第一更新步骤,并且指示位a、b各自记录为1或真。
[0062]
在车轮单元12a采用静止模式3时发生复位的情况下,执行恢复步骤,并且车轮单元12a恢复为与指示位a、b相关联的静止模式3,如图3中的虚线箭头所示。
[0063]
应注意的是,指示位a、b在记录为1后,在车轮单元12a的全部剩余寿命内保持该状态,除非其重新启动。
[0064]
实际上,重新启动仍然是可能的,以使操作者例如在对车轮单元12a进行测试期间能够通过向车轮单元射频传输适当的帧而将指示位a、b记录为0。该特征可防止在开发阶段的车轮单元实施的软件的更新。
[0065]
可在指示位a、b中至少有一个不为0的条件下执行重新启动,以便限制在指示位a、b已经为0时的不必要的重写。
[0066]
车轮单元12a从一种操作模式变为另一种操作模式(这对应于该方法的更新步骤的执行)由操作者执行,该操作者对由车轮单元12a实施的软件进行操作。
[0067]
然而,作为非限制性示例,车轮单元12a从一种操作模式变为另一种操作模式可以通过分析由传感器、特别是与车轮单元12a相关联的车轮14a的胎压传感器17b提供的数据来自动执行。
[0068]
例如,当车轮14a的胎压超过预设整定值时(这意味着轮胎被充气),车轮单元12a变为静止模式3。
[0069]
根据本发明的另一方面,该方法包括计数步骤,其在于用计数器对车轮单元12a经历的复位次数、更特别地“冷复位”的次数进行计数,并将其写入车轮单元12a的存储器22。
[0070]
复位计数例如用四位编码计数器来记录十六次复位。计数器可在诊断阶段读取。
[0071]
有利地,在有故障的车轮单元12a被返回的情况下,复位计数使得能够检查车轮单元12a是否经历了复位。
[0072]
作为非限制性示例,计数还可以涉及用另一计数器对“热复位”进行计数。
[0073]
出于可靠性的目的,在温度传感器17a测得的周围环境温度处于存储器22的预定操作范围内(例如-20℃至90℃的温度范围内)的情况下将数据记录在存储器22中,温度传感器17a是专为此目的而提供的。
[0074]
定期测量周围环境温度,例如每十分钟测量一次,当测得的周围环境温度在存储器22的预定操作范围内时,将数据记录在存储器22中。
[0075]
本发明使得能够保证在发生诸如“冷复位”或“热复位”事件的情况下的车轮单元12a的操作连续性。
[0076]
本发明还使得能够可靠地事后确定是否发生了意外复位。
[0077]
借助于复位计数器和对可能发生的复位的观察,根据本发明的方法还使得能够简化测试过程和相关结果分析。
[0078]
此外,本发明使得能够根据第三方(例如客户)的需要和期望来参数化车轮单元12a在复位情况下采用的行为模式。
[0079]
在车轮单元12a的交付阶段期间,这里对应于交付模式2,确保车轮单元12a在复位的情况下也保持在该模式。该特征至关重要,因为交付模式2是能耗最低的模式。
[0080]
最后,在车轮单元12a返回工厂的情况下,本发明使得能够防止车轮单元12a的操作模式的不合时宜的改变。
[0081]
实际上,本发明不会掩盖车轮单元12a的严重缺陷,而仅仅是由操作模式的改变引起的暂态行为模式。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!