一种膝关节术后辅助锻炼装置-j9九游会真人
1.本实用新型属于辅助锻炼技术领域,具体涉及一种膝关节术后辅助锻炼装置。
背景技术:
2.膝关节手术后,首先需要锻炼膝关节的屈伸的运动,逐渐恢改善关节的僵硬的状态,然后可以才可以进行站立的训练,使膝关节负重,恢复膝关节的负重能力,然后需要循序渐进的进行行走的训练,其中膝关节屈伸的运动需要持续较长的时间,这是以为在术后,患者肌肉和关节都处于僵硬状态,使得患者需要长时间多次对膝关节进行辅助弯曲,以达到放松关节,恢复肌肉力量的目的,但是患者在通过手部力量辅助膝关节进行弯曲时,不仅每次弯曲幅度不一导致无法达到要求,导致恢复效果不佳,且仅通过手部力量会导致患者容易出现疲劳的情况。
技术实现要素:
3.本实用新型提供了一种膝关节术后辅助锻炼装置,具有可以自动将患者膝关节进行弯曲以达到锻炼效果,且可以保证每次弯曲角度,从而保证锻炼恢复效果的特点。
4.本实用新型提供如下技术方案:包括支撑底座,所述支撑底座一侧固定连接有限位板,所述支撑底座顶端铰接有大腿定位板,所述大腿定位板一侧铰接有小腿定位板,所述小腿定位板底端固定连接有从动块,所述小腿定位板一侧固定连接有足部定位板,所述支撑底座顶端固定连接有限高块,所述限高块内部转动连接有丝杆,所述丝杆外侧滑动连接有主动块,所述从动块转动连接于所述主动块内侧,所述支撑底座顶端固定连接有驱动电机。
5.其中,所述限位板一侧固定连接有弹簧,所述弹簧位于所述主动块和所述限位板之间。
6.其中,所述大腿定位板、所述小腿定位板和所述足部定位板外侧均固定连接有固定带。
7.其中,所述限高块内侧开设有转动槽,所述丝杆通过所述转动槽转动连接于所述限高块内部。
8.其中,所述支撑底座外侧固定连接有控制块。
9.本实用新型的有益效果是:通过从动块和主动块的配合,使得患者无需通过手部力量即可持续重复完成膝关节弯曲锻炼工作,且由于丝杆的引导,使得患者膝关节每次弯曲程度均相同保持标准,从而达到保证锻炼恢复效果的目的。
10.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
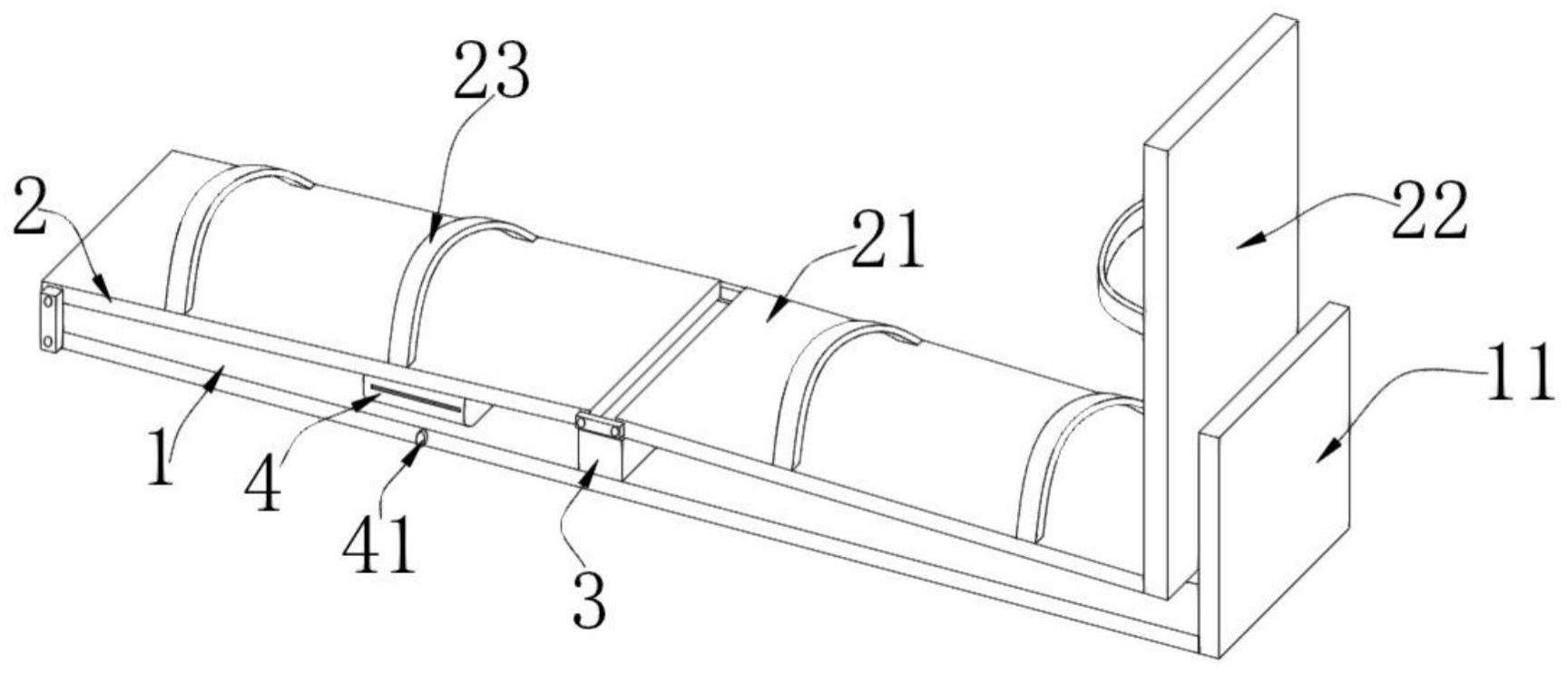
11.图1为本实用新型的立体结构示意图;
12.图2为本实用新型中小腿定位板的运动状态示意图;
13.图3为本实用新型的拆解示意图;
14.图4为本实用新型另一视角的结构示意图。
15.图中:1、支撑底座;11、限位板;12、弹簧;2、大腿定位板;21、小腿定位板;211、从动块;22、足部定位板;23、固定带;3、限高块;31、丝杆;32、主动块;33、转动槽;4、驱动电机;41、控制块。
具体实施方式
16.请参阅图1-图4,本实用新型提供以下技术方案:包括支撑底座1,支撑底座1一侧固定连接有限位板11,支撑底座1顶端铰接有大腿定位板2,大腿定位板2一侧铰接有小腿定位板21,小腿定位板21底端固定连接有从动块211,小腿定位板21一侧固定连接有足部定位板22,支撑底座1顶端固定连接有限高块3,限高块3内部转动连接有丝杆31,丝杆31外侧滑动连接有主动块32,从动块211转动连接于主动块32内侧,支撑底座1顶端固定连接有驱动电机4。
17.本实施方案中:支撑底座1用于对各部件进行支撑,从而完成对患者进行膝关节弯曲的锻炼工作,支撑底座1一侧固定的限位板11用于对丝杆31的转动进行支撑,支撑底座1顶端铰接的大腿定位板2用于对患者的大腿进行承载,大腿定位板2一侧铰接的小腿定位板21用于对患者的小腿进行承载,小腿定位板21一侧固定的足部定位板22用于对患者的足部进行承载,由于大腿定位板2和小腿定位板21铰接,使得当大腿定位板2和小腿定位板21进行转动时,会带动患者膝关节进行弯曲完成锻炼效果,小腿定位板21底端固定的从动块211用于带动小腿定位板21进行运动,使得小腿定位板21可以通过滑动与大腿定位板2发生转动,完成电动患者膝关节进行弯曲锻炼的目的,支撑底座1顶端固定的限高块3用于对大腿定位板2和小腿定位板21连接处进行限位,从而使得大腿定位板2和小腿定位板21的连接处会高于大腿定位板2和支撑底座1的连接处,使得当小腿定位板21朝向大腿定位板2进行滑动时,小腿定位板21和大腿定位板2会相对转动,从而带动患者膝关节进行弯曲锻炼的目的,支撑底座1顶端固定的驱动电机4用于带动丝杆31进行转动,驱动电机4的输出端与丝杆31固定,使得驱动电机4会带动丝杆31进行转动,丝杆31会在限高块3的内部进行转动,主动块32内侧设有螺纹槽,使得当丝杆31转动时会带动主动块32在丝杆31的外侧进行滑动,完成带动从动块211进行运动的目的,使得从动块211会带动小腿定位板21进行运动,进而达到将患者膝关节进行弯曲锻炼的目的,当患者需要进行漆关节弯曲锻炼时,可以先将大腿放置于大腿定位板2的外侧,将小腿和足部分别放置于小腿定位板21和足部定位板22的外侧,此时患者可以启动驱动电机4,由于驱动电机4的输出端与丝杆31固定,使得驱动电机4会带动丝杆31在限高块3的内侧进行转动,丝杆31在转动时会带动主动块32进行滑动,由于从动块211位于主动块32内侧,使得主动块32在运动时,会带动从动块211进行滑动,此时从动块211会带动小腿定位板21进行运动,小腿定位板21会朝向大腿定位板2进行运动,使得大腿定位板2和小腿定位板21会相对转动,完成带动患者腿部进行膝关节弯曲锻炼的目的,驱动电机4会通过丝杆31带动主动块32进行往复运动,从而使得患者可以持续完成膝关节弯曲的锻炼工作,通过从动块211和主动块32的配合,使得患者无需通过手部力量即可持续重复完成膝关节弯曲锻炼工作,且由于丝杆31的引导,使得患者膝关节每次弯曲程度均相同保持标准,从而达到保证锻炼恢复效果的目的。
18.限位板11一侧固定连接有弹簧12,弹簧12位于主动块32和限位板11之间;限位板11一侧固定的弹簧12用于对足部定位板22进行缓冲,由于弹簧12位于主动块32和限位板11之间,使得当小腿定位板21带动足部定位板22进行往复运动时,足部定位板22在回至原位的过程中会被弹簧12缓冲,从而避免对患者腿部造成冲击力。
19.大腿定位板2、小腿定位板21和足部定位板22外侧均固定连接有固定带23;大腿定位板2、小腿定位板21和足部定位板22外侧均固定的固定带23分别用于对患者的大腿、小腿以及足部进行固定,从而使得当大腿定位板2和小腿定位板21进行相对转动时,可以带动患者膝关节进行弯曲锻炼。
20.限高块3内侧开设有转动槽33,丝杆31通过转动槽33转动连接于限高块3内部;限高块3内侧开设的转动槽33用于对丝杆31的转动进行让空,使得丝杆31可以贯穿于限高块3与驱动电机4的输出端相连,从而使得丝杆31可以被驱动电机4带动在限高块3的内侧进行转动,完成带动小腿定位板21进行运动的目的。
21.支撑底座1外侧固定连接有控制块41;支撑底座1外侧固定的控制块41用于对驱动电机4进行启闭,使得患者可以根据实际情况对驱动电机4进行控制,控制块41与驱动电机4之间通过线缆连接,使得控制块41可以完成对驱动电机4的控制工作。
22.本实用新型的工作原理及使用流程:当患者需要进行漆关节弯曲锻炼时,可以先将大腿放置于大腿定位板2的外侧,将小腿和足部分别放置于小腿定位板21和足部定位板22的外侧,此时患者可以启动驱动电机4,由于驱动电机4的输出端与丝杆31固定,使得驱动电机4会带动丝杆31在限高块3的内侧进行转动,丝杆31在转动时会带动主动块32进行滑动,由于从动块211位于主动块32内侧,使得主动块32在运动时,会带动从动块211进行滑动,此时从动块211会带动小腿定位板21进行运动,小腿定位板21会朝向大腿定位板2进行运动,使得大腿定位板2和小腿定位板21会相对转动,完成带动患者腿部进行膝关节弯曲锻炼的目的,驱动电机4会通过丝杆31带动主动块32进行往复运动,从而使得患者可以持续完成膝关节弯曲的锻炼工作。
当前第1页1
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!