仿生自复制微纳米机器人-j9九游会真人
1.本发明涉及微纳米机器人制造技术领域,具体而言,涉及一种仿生自复制微纳米机器人。
背景技术:
2.微纳米机器人是指尺度在微纳米级别(几纳米至几百微米)的小型机器人,在生物传感、靶向给药、栓塞治疗、微创手术、细胞操作、污染物降解、微纳米制造等领域有着广阔的应用前景,已成为机器人、化学、生物、医学等学科的研究热点。
3.按照部件是否含有生命物质,微纳米机器人可分为生物型、非生物型和生物混合型。非生物型微纳米机器人可采用自上而下或自下而上的策略制造,生物型微纳米机器人主要采用自下而上的策略制造。自上而下的制造策略包括光刻、等离子刻蚀、激光直写、气相沉积、3d打印等;自下而上的制造策略主要为化学合成和自组装。微纳米机器人的驱动方式主要包括化学驱动、生物驱动、磁场驱动、超声场驱动、光驱动、电场驱动等。
4.相关技术中的非生物型微纳米机器人,通过光、电、磁、热等物理场敏感材料构筑,可实现传感、计算、作动等多种功能,但不能实现自复制,进而不能产生像生命那样以“生长发育”的方式实现物质形态变换的高等智能行为。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种仿生自复制微纳米机器人,该仿生自复制微纳米机器人具有能够实现非生物型微纳米机器人的自复制等优点。
6.为实现上述目的,根据本发明的实施例提出一种仿生自复制微纳米机器人,所述仿生自复制微纳米机器人包括多个非生命物质基本单元,每个所述非生命物质基本单元包括单元主体、第一物理作用结构、第二物理作用结构和第三物理作用结构,所述第一物理作用结构、所述第二物理作用结构和所述第三物理作用结构均设在所述单元主体上,所述第一物理作用结构适于通过第一物理作用在散落有多个所述非生命物质基本单元的液体环境中掠夺所述非生命物质基本单元以使被掠夺的多个所述非生命物质基本单元组合成所述仿生自复制微纳米机器人,所述第二物理作用结构适于通过第二物理作用使被掠夺的多个所述非生命物质基本单元组成的所述仿生自复制微纳米机器人保持组合状态,所述第三物理作用结构适于通过第三物理作用使两个所述仿生自复制微纳米机器人相互脱离。
7.根据本发明实施例的仿生自复制微纳米机器人,具有能够实现非生物型微纳米机器人的自复制等优点。
8.另外,根据本发明上述实施例的仿生自复制微纳米机器人还可以具有如下附加的技术特征:
9.根据本发明的一个实施例,所述第一物理作用为磁场力、电场力、长程范德华引力中的至少一种,所述第二物理作用为固体间弹性力、磁场力、范德华力中的至少一种,所述
第三物理作用为温度场、电场或磁场中的至少一种。
10.根据本发明的一个实施例,多个所述非生命物质基本单元均为左手性或均为右手性。
11.根据本发明的一个实施例,多个所述非生命物质基本单元为旋转对称排布。
12.根据本发明的一个实施例,每个所述单元主体上还设有掠夺辅助配对凸起和掠夺辅助配对凹槽,所述掠夺辅助配对凸起适于在所述第一物理作用结构掠夺液体环境中的非生命物质基本单元时与所述掠夺辅助配对凹槽相配合。
13.根据本发明的一个实施例,多个所述非生命物质基本单元为1-4种。
14.根据本发明的一个实施例,所述单元主体包括多个材料层且分别为下材料层、中材料层和上材料层,所述第一物理作用结构为第一磁体且嵌设在所述上材料层上,所述第二物理作用结构为形成在所述单元主体边沿的榫头和卯槽,所述第三物理作用结构为热胀材料件且设在所述上材料层的上表面。
15.根据本发明的一个实施例,所述第二物理作用结构还包括第二磁体,所述第二磁体设在所述中材料层上,所述第二磁体包括榫头磁体和卯槽磁体,所述榫头磁体设在所述榫头的边沿,所述卯槽磁体设在所述卯槽的边沿,所述榫头磁体和所述卯槽磁体的磁极方向相反。
16.根据本发明的一个实施例,每个所述单元主体均为扇形,多个所述单元主体适于拼合为圆形,所述榫头包括第一榫头和第二榫头,所述卯槽包括第一卯槽和第二卯槽,所述第一榫头在所述单元主体径向上的长度大于所述第二榫头在所述单元主体径向上的长度,所述第一卯槽在所述单元主体径向上的长度大于所述第二卯槽在所述单元主体径向上的长度,所述第一榫头适于配合在所述第一卯槽内,所述第二榫头适于配合在所述第二卯槽内,所述第一榫头和所述第二卯槽设在所述单元主体的同一直线边上且所述第二榫头和所述第一卯槽设在所述单元主体的另一直线边上,所述第一磁体的长度方向均沿所述单元主体的弦向定向且磁极方向相同或所述第一磁体的长度方向均沿所述单元主体的径向定向且相邻两个所述单元主体的所述第一磁体的磁极相反。
17.根据本发明的一个实施例,多个所述非生命物质基本单元包括多个第一单元和多个第二单元,所述第一单元的所述单元主体为四边形且具有两个长度相等的长边和两个长度相等的短边,所述第二单元的所述单元主体为等腰梯形,三个所述第一单元的所述单元主体适于拼合为三角形,每个所述第一单元的所述单元主体的两个短边分别设有第一榫头和第一卯槽,所述第一榫头适于配合在所述第一卯槽内,每个所述长边和短边的连接处设有第二子卯槽,两个所述第一单元的所述单元主体拼合时两个所述第二子卯槽共同限定出第二卯槽,所述第二单元的所述单元主体的上底和下底中较短的一个上设有第二榫头,所述第二榫头适于配合在所述第二卯槽内,所述第二单元的所述单元主体的上底和下底中的较长的一个上设有第三卯槽和第三榫头,所述第三榫头适于配合在所述第三卯槽内,所述第一单元的所述第一磁体的长度方向均垂直于所述第一单元的所述单元主体的长度方向,所述第二单元的所述第一磁体沿所述第二单元的所述单元主体的长度方向定向,所述第二单元的所述第一磁体设在所述单元主体的上底和下底中较长的一个的边沿。
18.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
19.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
20.图1是根据本发明一个具体实施例的仿生自复制微纳米机器人的结构示意图。
21.图2是根据本发明一个具体实施例的仿生自复制微纳米机器人的结构示意图。
22.图3是根据本发明一个具体实施例的仿生自复制微纳米机器人的第一单元的结构示意图。
23.图4是根据本发明一个具体实施例的仿生自复制微纳米机器人的第二单元的结构示意图。
24.图5是根据本发明另一个具体实施例的仿生自复制微纳米机器人的结构示意图。
25.图6是根据本发明另一个具体实施例的仿生自复制微纳米机器人的结构示意图。
26.图7是根据本发明另一个具体实施例的仿生自复制微纳米机器人的第一单元的结构示意图。
27.图8是根据本发明另一个具体实施例的仿生自复制微纳米机器人的局部结构示意图。
28.图9是根据本发明另一个具体实施例的仿生自复制微纳米机器人的结构示意图。
29.图10是根据本发明另一个具体实施例的仿生自复制微纳米机器人的局部结构示意图。
30.图11是根据本发明另一个具体实施例的仿生自复制微纳米机器人的局部结构示意图。
31.图12是根据本发明另一个具体实施例的仿生自复制微纳米机器人的结构示意图。
32.图13是根据本发明另一个具体实施例的仿生自复制微纳米机器人的第一单元的结构示意图。
33.图14是根据本发明实施例的仿生自复制微纳米机器人的的复制过程的流程图。
34.附图标记:仿生自复制微纳米机器人1、非生命物质基本单元10、第一单元11、第二单元12、单元主体100、下材料层110、中材料层120、上材料层130、第一物理作用结构200、掠夺辅助配对凸起210、掠夺辅助配对凹槽220、第二物理作用结构300、第一榫头311、第二榫头312、第三榫头313、第一卯槽321、第二卯槽322、第二子卯槽3220、第三卯槽323、第二磁体330、第三物理作用结构400。
具体实施方式
35.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限
定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
38.下面参考附图描述根据本发明实施例的仿生自复制微纳米机器人1。
39.如图1-图14所示,根据本发明实施例的仿生自复制微纳米机器人1包括多个非生命物质基本单元10,每个非生命物质基本单元10包括单元主体100、第一物理作用结构200、第二物理作用结构300和第三物理作用结构400,第一物理作用结构200、第二物理作用结构300和第三物理作用结构400均设在单元主体100上,第一物理作用结构200适于通过第一物理作用在散落有多个非生命物质基本单元10的液体环境中掠夺非生命物质基本单元10以使被掠夺的多个非生命物质基本单元10组合成仿生自复制微纳米机器人1,第二物理作用结构300适于通过第二物理作用使被掠夺的多个非生命物质基本单元10组成的仿生自复制微纳米机器人1保持组合状态,第三物理作用结构400适于通过第三物理作用使两个仿生自复制微纳米机器人1相互脱离。
40.具体而言,如图14所示,先利用自上而下的微加工工艺制造出非生命物质基本单元10,并提供一个或多个由非生命物质基本单元10装配好的仿生自复制微纳米机器人1作为引子机器人,引子机器人再利用自下而上的自组装方式进行自我复制。
41.该引子机器人通过第一物理作用结构200在第一物理作用下掠夺液体环境中的非生命物质基本单元10,与其自身的非生命物质基本单元10进行配对,掠夺与自身相同的非生命物质基本单元10以使被掠夺的多个非生命物质基本单元10组合成仿生自复制微纳米机器人1,第二物理作用结构300通过第二物理作用使多个被掠夺的非生命物质基本单元10形成的仿生自复制微纳米机器人1保持稳定的组合状态,避免多个非生命物质基本单元10相互脱离,最后第三物理作用结构400在第三物理作用下实现新形成的仿生自复制微纳米机器人1与原有引子机器人的相互脱离,实现仿生自复制微纳米机器人1的自复制。
42.通过自复制形成的每个仿生自复制微纳米机器人1也可以作为新的引子机器人,可以使液体环境达到饱和之前自复制速度逐渐加快。
43.根据本发明实施例的仿生自复制微纳米机器人1,通过设置第一物理作用结构200、第二物理作用结构300和第三物理作用结构400,使仿生自复制微纳米机器人1能够通过第一物理作用结构200在第一物理作用下掠夺非生命物质基本单元10以使被掠夺的多个非生命物质基本单元10组合成新的仿生自复制微纳米机器人1,利用第二物理作用结构300在第二物理作用下使被掠夺的非生命物质基本单元10组成的新的仿生自复制微纳米机器人1保持稳定的组合状态,并利用第三物理作用结构400在第三物理作用下使原有仿生自复制微纳米机器人1与新组成的仿生自复制微纳米机器人1相互脱离,从而实现仿生自复制微纳米机器人1的自复制,相比相关技术中的微纳米机器人,能够实现非生物型微纳米机器人的自复制,进而可产生类似生命体的以“生长发育”的方式实现物质形态变换的高等智能行为的可能,例如拓扑结构变化、几何形状变化、刚度变化等。
44.此外,由于仿生自复制微纳米机器人1为非生物型微纳米机器人,本身不含生命物质,与真实生命系统所需外界供能方式不同,用于生物医疗时不会像病毒那样带来侵略性,降低了生物安全方面的风险。
45.因此,根据本发明实施例的仿生自复制微纳米机器人1具有能够实现非生物型微纳米机器人的自复制等优点。
46.下面参考附图描述根据本发明具体实施例的仿生自复制微纳米机器人1。
47.可选地,所述第一物理作用为磁场力、电场力、长程范德华引力中的至少一种,所述第二物理作用为固体间弹性力、磁场力、范德华力中的至少一种,所述第三物理作用为温度场、电场或磁场中的至少一种。这样可以利用相对容易产生的物理作用实现仿生自复制微纳米机器人1的掠夺、组成和分离,降低仿生自复制微纳米机器人1的制造和自复制难度。
48.具体而言,仿生自复制微纳米机器人1的非生命物质基本单元10可以为一种或多种。种类越少,复制的成功率越高,种类越多仿生自复制微纳米机器人1的灵活性和功能的丰富性越强。
49.有利地,如图1-图13所示,多个非生命物质基本单元10均为左手性或均为右手性。本领域的技术人员可以理解的是,“手性”指一个物体不能与其镜像相重合。由于液体环境中如果同时存在左手性和右手性的非生命物质基本单元10,会极大降低复制的成功率,通过使多个非生命物质基本单元10均为左手性或均为右手性,可以提高仿生自复制微纳米机器人1的成功率。
50.更为有利地,如图1-图13所示,多个非生命物质基本单元10为旋转对称排布。这样可以便于减少非生命物质基本单元10的种类,进一步提高复制的成功率。
51.进一步地,如图1-图13所示,多个第一物理作用结构200的整体排布具有手性特征,可进一步提高复制的成功率。
52.更进一步地,如图13所示,每个单元主体100上还设有掠夺辅助配对凸起210和掠夺辅助配对凹槽220,掠夺辅助配对凸起210适于在第一物理作用结构200掠夺液体环境中的非生命物质基本单元10时与掠夺辅助配对凹槽220相配合。这样可以避免掠夺过程中不同种类的非生命物质基本单元10之间的错误配对。
53.具体而言,掠夺辅助配对凹槽220和掠夺辅助配对凸起210形成在单元主体100的上表面。
54.具体地,非生命物质基本单元10小于等于10种,这里优选非生命物质基本单元10可以为1-4种。这样可以在保证复制成功率的情况下提高功能的丰富程度。
55.这里需要理解的是,完全相同的非生命物质基本单元10称为同一种,若单元主体100和任一物理作用结构存在不同则为不同种。
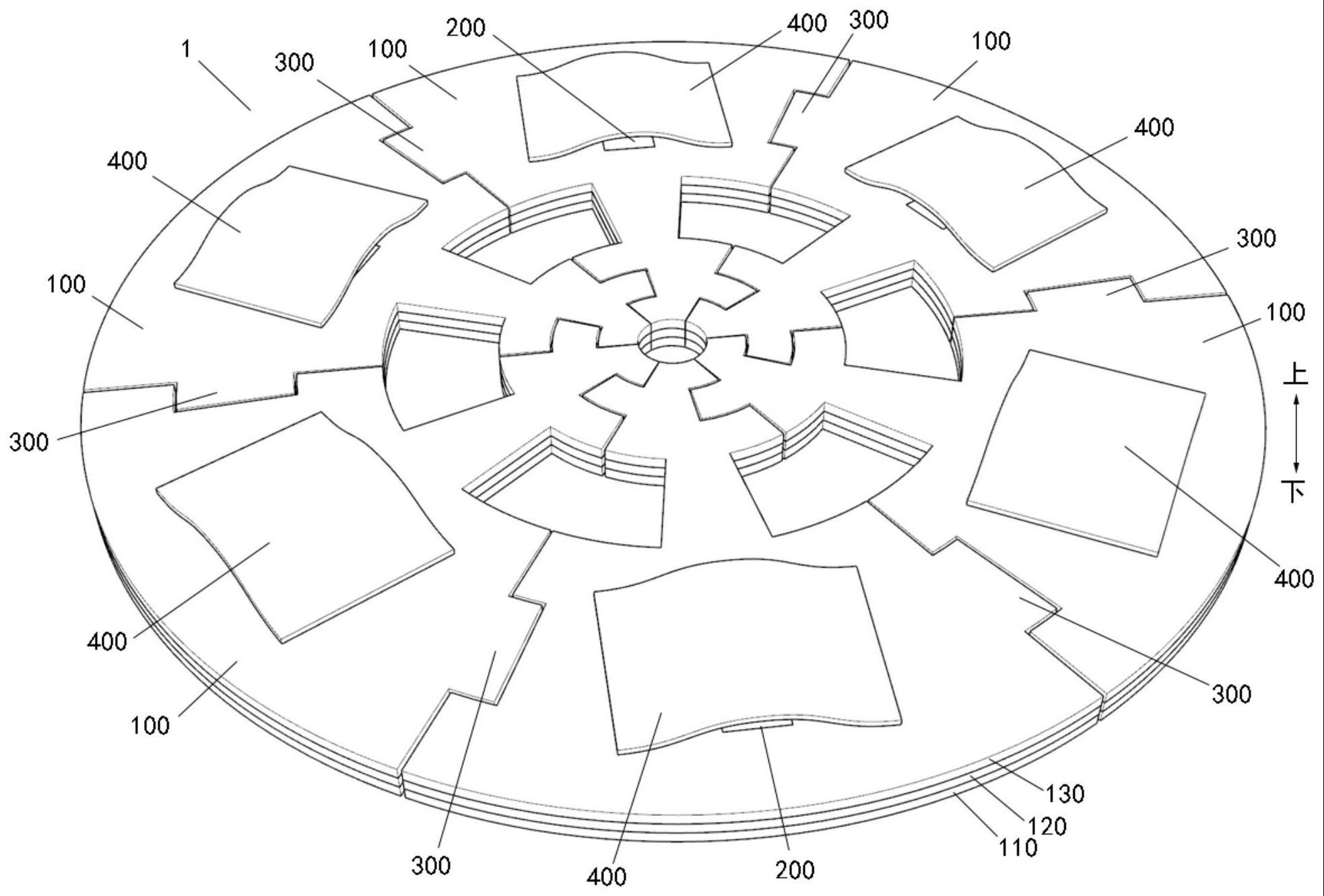
56.图1-图13示出了根据本发明一些示例的仿生自复制微纳米机器人1。如图1-图13所示,单元主体100包括多个材料层且分别为下材料层110、中材料层120和上材料层130,第一物理作用结构200为第一磁体且嵌设在上材料层130上,第二物理作用结构300为形成在单元主体100边沿的榫头和卯槽,第三物理作用结构400为热胀材料件且设在上材料层130的上表面。这里需要理解的是,榫头和卯槽配合形成的约束作用力属于固体间弹性力。这样可以利用磁场力作为第一物理作用,使第一物理作用结构200能够通过磁力掠夺液体环境中的非生命物质基本单元10,使被掠夺的非生命物质基本单元10组成的仿生自复制微纳米
机器人1在所述榫头和卯槽的约束作用下保持稳定的组合状态,使温度场作为第三物理作用,通过加热使第三物理作用结构400发生大变形,使作为引子的仿生自复制微纳米机器人1与新生成的仿生自复制微纳米机器人1之间的磁场力减弱,从而促使两个仿生自复制微纳米机器人1相互分离,从而实现仿生自复制微纳米机器人1的自复制,而且物理作用结构相对容易加工和制造,物理作用相对容易实现,可以降低仿生自复制微纳米机器人1的制造难度。
57.此外,通过榫卯结构实现的第二物理作用结构300,通过利用固体间弹性力,可提供非完全固定的约束,以构造保证机器人稳定性的能量势垒。在微米级,类榫卯结构允许作用强度高,可超过10mpa量级,远大于磁场力、电场力、分子间弱作用力,而且所提供支持力的方向多变,可自适应外界的扰动。此外,通过改变几何图案就可以调控所需要的作用方式,可以利用成熟的微加工工艺进行加工,降低加工难度,同时保留了一定的自由度,为结构拆分并再次组装提供了可能性。
58.有利地,如图10所示,第二物理作用结构300还包括第二磁体330,第二磁体330设在中材料层120上,第二磁体330包括榫头磁体和卯槽磁体,所述榫头磁体设在所述榫头的边沿,所述卯槽磁体设在所述卯槽的边沿,所述榫头磁体和所述卯槽磁体的磁极方向相反。这样可以利用第二磁体330提供磁场力补充所述第二物理作用,用于补充类榫卯结构固体间弹性力所缺乏的面外限制作用,从而提高仿生自复制微纳米机器人1的稳定性。
59.具体而言,非生命物质基本单元10的厚度小于其平面内最大长度尺寸,以减小微加工的难度和掠夺非生命物质基本单元10的难度,增加复制成功率。
60.单元主体100可以为聚合物、金属等非生物材料,所述榫头和所述卯槽的边沿可以为弹性好的、柔软的材料,比如硅胶、水凝胶等,这样容许一定的装配误差,提高复制成功率。第一磁体和第二磁体330可以为钕铁硼永磁材料、稀土钴永磁材料、铝镍钴系永磁合金、铁铬钴系永磁合金、永磁铁氧体等。
61.以仿生自复制微纳米机器人1为平台,还可以在仿生自复制微纳米机器人1上搭载导电材料,每一个非生命物质基本单元10中可以沉积一层金属层,使仿生自复制微纳米机器人1整体形成一个电感-电容-电阻共振回路,外界可以在谐振频率附近激励它们,以实现非接触探测功能。还可以搭载磁性材料,每一个非生命物质基本单元中部可以额外地布置与自复制过程无关的磁体,通过外界施加磁场控制运动。
62.下面结合图1-图13描述根据本发明具体实施例的仿生自复制微纳米机器人1。其中,图2-图4中的矩形网格填充区域为第一物理作用结构200的磁体南极,三角形网格填充区域为第一物理作用结构200的磁体北极,分散圆点填充区域为单元主体100。
63.在一些实施例中,如图1-图5所示,每个单元主体100均为扇形,多个单元主体100适于拼合为圆形,所述榫头包括第一榫头311和第二榫头312,所述卯槽包括第一卯槽321和第二卯槽322,第一榫头311在单元主体100径向上的长度大于第二榫头312在单元主体100径向上的长度,第一卯槽321在单元主体100径向上的长度大于第二卯槽322在单元主体100径向上的长度,第一榫头311适于配合在第一卯槽321内,第二榫头312适于配合在第二卯槽322内,第一榫头311和第二卯槽322设在单元主体100的同一直线边上且第二榫头312和第一卯槽321设在单元主体100的另一直线边上,所述第一磁体的长度方向均沿单元主体100的弦向定向且磁极方向相同或所述第一磁体的长度方向均沿单元主体100的径向定向且相
邻两个单元主体100的所述第一磁体的磁极相反。
64.具体而言,在一些实施例中,如图1-图4所示,仿生自复制微纳米机器人1包括第一单元11和第二单元12。第一单元11的数量等于第二单元12的数量,总数优选2个、4个、6个、8个、10个、12个以保证成功率。单元主体100共有三层结构,分别为下材料层110、中材料层120、上材料层130,第二磁体330设在中材料层120,第一磁体设在上材料层130,第三物理作用结构400设在上材料层130的上表面,作为非生命物质基本单元10的最上层。
65.先利用旋涂、光刻、等离子刻蚀、磁控溅射等成熟微加工工艺制造出非生命物质基本单元10,并提供一个或多个由非生命物质基本单元10装配好的仿生自复制微纳米机器人1作为引子机器人,引子机器人再利用自下而上的自组装方式进行自我复制。
66.该引子机器人中的非生命物质基本单元10的第一物理作用结构200利用作为第一物理作用的磁场力掠夺可与其配对的非生命物质基本单元10,其中第一单元11掠夺第二单元12、第二单元12掠夺第一单元11,被掠夺的非生命物质基本单元10数目达到需要数目时排列成圆形,并通过第二物理作用结构300的榫头和卯槽的固体间弹性力和第二磁体330的磁场力实现互锁,形成稳定的、相同的仿生自复制微纳米机器人1。在液体整体升温作用,即第三物理作用下,热胀材料件发生大变形,降低引子机器人与通过自复制得到的新的仿生自复制微纳米机器人1之间的磁场力,进而实现两个仿生自复制微纳米机器人1的相互脱离。周期性地改变液体环境的温度场,可实现仿生自复制微纳米机器人1的多次复制。
67.通过复制形成的每个仿生自复制微纳米机器人1也可以作为引子,因而在液体环境饱和之前复制速度能够逐渐加快。
68.第一单元11和第二单元12中的每一个都是具有手性的,且液体环境中只存在其左右手性的一种,如果液体环境中同时存在左手性和右手性的,则会极大降低复制的成功率。
69.第一单元11的单元主体100与第二单元12的单元主体相同,作为第一物理作用结构200的第一磁体的集合并不满足手性。
70.在一些实施例中,如图5所示,非生命物质基本单元10可以均为同一种且旋转对称排布,这样可以提高自复制的成功率。
71.具体而言,仿生自复制微纳米机器人1包括完全相同的多个非生命物质基本单元10。总数优选2个、4个、6个、8个、10个、12个以保证成功率。单元主体100共有三层结构,分别为下材料层110、中材料层120、上材料层130,第二磁体330设在中材料层120,第一磁体设在上材料层130,第三物理作用结构400设在上材料层130的上表面,作为非生命物质基本单元10的最上层。
72.先利用旋涂、光刻、等离子刻蚀、磁控溅射等成熟微加工工艺制造出非生命物质基本单元10,并提供一个或多个由非生命物质基本单元10装配好的仿生自复制微纳米机器人1作为引子机器人,引子机器人再利用自下而上的自组装方式进行自我复制。
73.该引子机器人中的非生命物质基本单元10的第一物理作用结构200利用作为第一物理作用的磁场力掠夺非生命物质基本单元10,被掠夺的非生命物质基本单元10数目达到需要数目时排列成圆形,并通过第二物理作用结构300的榫头和卯槽的固体间弹性力和第二磁体330的磁场力实现互锁,形成稳定的、相同的仿生自复制微纳米机器人1。在液体整体升温作用,即第三物理作用下,热胀材料件发生大变形,降低引子机器人与通过自复制得到的新的仿生自复制微纳米机器人1之间的磁场力,进而实现两个仿生自复制微纳米机器人1
的相互脱离。周期性地改变液体环境的温度场,可实现仿生自复制微纳米机器人1的多次复制。
74.通过复制形成的每个仿生自复制微纳米机器人1也可以作为引子,因而在液体环境饱和之前复制速度能够逐渐加快。
75.在一些实施例中,如图6-图13所示,多个非生命物质基本单元10包括多个第一单元11和多个第二单元12,第一单元11的单元主体100为四边形且具有两个长度相等的长边和两个长度相等的短边,第二单元12的单元主体100为等腰梯形,三个第一单元11的单元主体100适于拼合为三角形,每个第一单元11的单元主体100的两个短边分别设有第一榫头311和第一卯槽321,第一榫头311适于配合在第一卯槽321内,每个所述长边和短边的连接处设有第二子卯槽3220,两个第一单元11的单元主体100拼合时两个第二子卯槽3220共同限定出第二卯槽322,第二单元12的单元主体100的上底和下底中较短的一个上设有第二榫头312,第二榫头312适于配合在第二卯槽322内,第二单元12的单元主体100的上底和下底中的较长的一个上设有第三卯槽323和第三榫头313,第三榫头313适于配合在第三卯槽323内,第一单元11的所述第一磁体的长度方向均垂直于第一单元11的单元主体100的长度方向,第二单元12的所述第一磁体沿第二单元12的单元主体100的长度方向定向,第二单元12的所述第一磁体设在单元主体100的上底和下底中较长的一个的边沿。
76.具体而言,如图6所示,三个第一单元11可以构成一个三角形的一级机器人。第一单元11的单元主体100共有三层结构,分别为下材料层110、中材料层120、上材料层130,第二磁体330设在中材料层120上,第一物理作用结构200设在上材料层130上,第三物理作用结构400设在上材料层130的上表面,作为非生命物质基本单元10的最上层。图10示出了第二磁体330的具体设置方式。每个榫头和卯槽的边沿处均设有第二磁体330。
77.先利用旋涂、光刻、等离子刻蚀、磁控溅射等成熟微加工工艺制造出第一单元11和第二单元12,并提供一个或多个由多个第一单元11装配好的三角形的一级机器人作为一级引子机器人,一级引子机器人再利用自下而上的自组装方式进行自我复制。
78.该一级引子机器人中的第一单元11利用作为第一物理作用的磁场力掠夺可与其配对的第一单元11,被掠夺的第一单元11通过作为第二物理作用的固体间弹性力和磁场力互锁,形成稳定的、相同的一级机器人。过程中不需要复制完成时才实现互锁,每两个第一单元11之间都可以互锁,这样提高了自复制效率,但在整个过程中会同时存在很多半成品。在作为第三物理作用的液体整体升温作用下,热胀材料件发生大变形,降低该一级引子机器人与复制得到的新的一级机器人之间的磁场力,进而实现两个一级机器人的相互脱离。周期性地改变液体温度场,可实现一级机器人的多次复制。通过复制形成的每个一级机器人也可以作为引子机器人,因而在饱和之前复制速度可以逐渐加快。
79.如图6-图12所示,如图6所示的三角形的一级机器人还可在如图8所示的二级引子机器人的引导下实现二级复制,形成如图9和图10所示的更大的三角形机器人,二级引子机器人由两个第一单元11和一个第二单元12构成。进一步地,如图9所示的二级机器人还可在如图11所示的三级引子机器人的引导下实现三级复制,形成如图12所示的更大的六边形机器人,三级引子机器人由两个第二单元12构成,并进一步实现平面密铺功能,可用于血管的选择性栓塞或工业管道的可控化堵塞。
80.在多种不同结构的引子的引导下,可实现多级复制,形成更加复杂的结构,实现功
能的转变。能够形成更多级的结构会增加仿生自复制微纳米机器人1的智能维度。
81.根据本发明实施例的仿生自复制微纳米机器人1的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
82.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
83.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!