一种器件以及电子设备的制作方法-j9九游会真人
1.本技术涉及光通信领域,尤其涉及一种微机电系统,尤其涉及一种器件以及电子设备。
背景技术:
2.微机电系统(micro electro mechanical systems,mems)器件是指尺寸在几毫米乃至更小的高科技装置。mems器件包括可动部件和外框。可动部件和外框之间通过悬臂梁连接。例如,悬臂梁所固定的导线向可动部件传输电信号,以驱动该可动部件发生偏转。又如,可动部件为光探测器等器件,该可动部件所检测到的探测信号传输至悬臂梁所固定的导线上,该导线还与处理器连接,处理器接收并处理来自导线的探测信号。
3.悬臂梁在可动部件偏转的过程中,会使得悬臂梁所固定的导线受到应力作用。该应力作用导致导线发生蠕变。发生蠕变的导线会导致mems器件失稳,降低了mems器件的可靠性。
技术实现要素:
4.本技术实施例提供了一种器件以及电子设备,其用于避免器件所固定的导线受到过大的应力,降低导线的蠕变速率,进而提升器件结构的稳定性以及可靠性。
5.第一方面,本发明实施例提供了一种器件。所述器件包括可动部件以及悬臂梁,所述悬臂梁与所述可动部件连接;所述悬臂梁的横截面具有第一长度和第二长度,所述横截面为通过切面切割所述悬臂梁以获取,所述悬臂梁的轴向方向平行于所述切面;所述第一长度大于所述第二长度,所述可动部件与导线连接,所述导线位于所述悬臂梁具有所述第二长度的端部,所述导线用于与所述可动部件之间传输第一电信号,所述悬臂梁扭转的情况下,所述端部的应力小于所述悬臂梁具有所述第一长度的侧壁的应力。
6.本方面所示,能够有效地降低悬臂梁所固定的导线所受到的应力的大小,降低导线的蠕变速率。有效地避免了导线出现失稳的情况,提高了器件结构的稳定性以及可靠性,进而提升器件的寿命。
7.基于第一方面,一种可选的实现方式中,所述第一长度和所述第二长度之间的比值为大于或等于5且小于或等于20的区间内的任一数值。
8.本实现方式中,有效地降低了悬臂梁的端部所固定的导线所受到的应力,降低了导线的蠕变速率。而且悬臂梁沿轴向方向的第一长度较大,有效地提高了悬臂梁沿轴向方向的刚度,提升了悬臂梁抗冲击的力度,避免悬臂梁出现断裂,提升了悬臂梁的使用寿命。
9.基于第一方面,一种可选的实现方式中,所述导线包括第一导线,所述第一导线位于所述端部的表面,所述器件还包括位于所述端部的表面和所述第一导线之间的绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量。
10.本实现方式中,在绝缘缓冲层的杨氏模量小于悬臂梁的杨氏模量的情况下,悬臂梁表面的应力能够集中于悬臂梁和绝缘缓冲层之间,绝缘缓冲层能够有效地降低传递至第
一导线上的应力大小,更有效地降低第一导线的蠕变速率。
11.基于第一方面,一种可选的实现方式中,所述导线包括第二导线,所述端部具有穿槽,所述第二导线穿过所述穿槽设置,所述器件还包括位于所述穿槽槽底和所述第二导线之间的绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量。
12.本实现方式中,在绝缘缓冲层的杨氏模量小于悬臂梁的杨氏模量的情况下,穿槽槽底的应力能够集中于穿槽槽底和绝缘缓冲层之间,绝缘缓冲层能够有效地降低传递至第二导线上的应力大小,更有效地降低第二导线的蠕变速率。
13.基于第一方面,一种可选的实现方式中,所述导线包括第一导线和第二导线,所述第一导线位于所述端部的表面;所述端部具有穿槽,所述第二导线穿过所述穿槽设置,所述器件还包括绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量,所述绝缘缓冲层位于所述端部的表面和所述第一导线之间,所述绝缘缓冲层还位于所述穿槽槽底和所述第二导线之间。
14.本实现方式中,绝缘缓冲层能够有效地降低传递至第一导线以及第二导线上的应力大小,更有效地降低第一导线以及第二导线的蠕变速率。
15.基于第一方面,一种可选的实现方式中,所述绝缘缓冲层由介电材料制成,所述绝缘缓冲层的杨氏模量大于或等于压强阈值。
16.本实现方式中,在所述绝缘缓冲层由介电材料制成,保证绝缘缓冲层的绝缘特性。在绝缘缓冲层的杨氏模量大于或等于压强阈值的情况下,该绝缘缓冲层抗形变的能力能够有效地阻碍应力传递至导线上。
17.基于第一方面,一种可选的实现方式中,所述绝缘缓冲层沿所述悬臂梁轴向的厚度大于或等于厚度阈值。
18.本实现方式中,在所述绝缘缓冲层沿所述悬臂梁轴向的厚度大于或等于厚度阈值的情况下,导致有效地降低传递至导线上的应力大小,进而导致导线的蠕变速率较低。
19.基于第一方面,一种可选的实现方式中,所述绝缘缓冲层的表面覆盖绝缘覆盖层,所述导线位于所述绝缘缓冲层和所述绝缘覆盖层之间。
20.本实现方式中,该绝缘覆盖层能够吸收绝缘缓冲层表面的应力,避免绝缘缓冲层表面的应力全部集中于导线上,有效地降低了传递至导线上的应力大小。
21.基于第一方面,一种可选的实现方式中,沿所述悬臂梁的轴向方向,所述导线的厚度小于或等于高度阈值。
22.本实现方式中,在导线的厚度小于或等于高度阈值的情况下,降低了导线的厚度,有效地降低了传递至导线上的应力。
23.基于第一方面,一种可选的实现方式中,所述端部固定多个所述导线,所述多个导线中,包括传输所述第一电信号方向相反的两个导线。
24.本实现方式中,悬臂梁能够固定多个导线,提高了处理器与可动部件之间传输电信号的效率。而且在多个导线中包括传输所述第一电信号方向相反的两个导线的情况下,能够有效地降低导线之间所产生的洛伦兹力对可动部件的偏转所造成的串扰。
25.基于第一方面,一种可选的实现方式中,所述多个导线所传输的多路所述第一电信号中,所有沿第一方向传输的所述第一电信号的电流值的和为第一电流值,所有沿第二方向传输的所述第一电信号的电流值的和为第二电流值,所述第一方向和所述第二方向相
反,所述第一电流值和所述第二电流值相同。
26.本实现方式中,在第一电流值和第二电流值相同,且第一方向和第二方向相反的情况下,多个导线之间所产生的洛伦兹力相互抵消,从而有效地避免了导线所产生的洛伦兹力对可动部件的偏转所造成的串扰,尽可能的避免可动部件偏转的角度的误差。
27.基于第一方面,一种可选的实现方式中,所述悬臂梁的正投影呈u形,y形,或折叠形。
28.本实现方式中,悬臂梁扭转的过程中,悬臂梁的应力能够有效地分散于悬臂梁内,提高了通过悬臂梁所释放的应力,降低了传递至悬臂梁所固定的导线上的应力大小。
29.基于第一方面,一种可选的实现方式中,所述悬臂梁已掺杂,已掺杂的所述悬臂梁用于与所述可动部件之间传输第二电信号。
30.本实现方式中,悬臂梁能够传输第二电信号,提高了悬臂梁和可动部件之间所传输的电信号的效率。
31.第二方面,本发明实施例提供了一种电子设备。所述电子设备包括处理器以及器件,所述器件包括可动部件以及悬臂梁,所述悬臂梁与所述可动部件连接;所述悬臂梁的横截面具有第一长度和第二长度,所述第一长度大于所述第二长度,所述横截面为通过切面切割所述悬臂梁以获取,所述悬臂梁的轴向方向平行于所述切面;所述可动部件与导线连接,所述导线位于所述悬臂梁具有所述第二长度的端部,所述导线用于与所述可动部件之间传输第一电信号,所述悬臂梁扭转的情况下,所述端部的应力小于所述悬臂梁具有所述第一长度的侧壁的应力;所述处理器与所述导线连接,所述处理器用于与所述导线之间传输所述第一电信号。
32.本方面有益效果的说明,请参见第一方面所示,具体不做赘述。
33.基于第二方面,一种可选的实现方式中,所述可动部件包括基座以及所述基座所固定的光电元件,所述基座还包括导电线圈,所述悬臂梁与所述基座连接,所述导线与所述导电线圈连接,或,所述导线与所述光电元件连接。
34.基于第二方面,一种可选的实现方式中,所述第一长度和所述第二长度之间的比值为大于或等于5且小于或等于20的区间内的任一数值。
35.基于第二方面,一种可选的实现方式中,所述导线包括第一导线,所述第一导线位于所述端部的表面,所述器件还包括位于所述端部的表面和所述第一导线之间的绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量。
36.基于第二方面,一种可选的实现方式中,所述导线包括第二导线,所述端部具有穿槽,所述第二导线穿过所述穿槽设置,所述器件还包括位于所述穿槽槽底和所述第二导线之间的绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量。
37.基于第二方面,一种可选的实现方式中,所述导线包括第一导线和第二导线,所述第一导线位于所述端部的表面;所述端部具有穿槽,所述第二导线穿过所述穿槽设置,所述器件还包括绝缘缓冲层,所述绝缘缓冲层的杨氏模量小于所述悬臂梁的杨氏模量,所述绝缘缓冲层位于所述端部的表面和所述第一导线之间,所述绝缘缓冲层还位于所述穿槽槽底和所述第二导线之间。
38.基于第二方面,一种可选的实现方式中,所述绝缘缓冲层由孔隙率小于致密阈值的介电材料制成,所述绝缘缓冲层的杨氏模量大于或等于压强阈值。
39.基于第二方面,一种可选的实现方式中,所述绝缘缓冲层沿所述悬臂梁轴向的厚度大于或等于厚度阈值。
40.基于第二方面,一种可选的实现方式中,所述绝缘缓冲层的表面覆盖绝缘覆盖层,所述导线位于所述绝缘缓冲层和所述绝缘覆盖层之间。
41.基于第二方面,一种可选的实现方式中,沿所述悬臂梁的轴向方向,所述导线的厚度小于或等于高度阈值。
42.基于第二方面,一种可选的实现方式中,所述端部固定多个所述导线,所述多个导线中,包括传输所述第一电信号方向相反的两个导线。
43.基于第二方面,一种可选的实现方式中,所述多个导线所传输的多路所述第一电信号中,所有沿第一方向传输的所述第一电信号的电流值的和为第一电流值,所有沿第二方向传输的所述第一电信号的电流值的和为第二电流值,所述第一方向和所述第二方向相反,所述第一电流值和所述第二电流值相同。
44.基于第二方面,一种可选的实现方式中,所述悬臂梁的正投影呈u形,y形,或折叠形。
45.基于第二方面,一种可选的实现方式中,所述悬臂梁已掺杂,已掺杂的所述悬臂梁用于与所述可动部件之间传输第二电信号。
附图说明
46.图1为本技术实施例提供的电子设备的第一种实施例俯视结构示例图;
47.图2为本技术实施例提供的导线在应力作用下的蠕变曲线示例图;
48.图3a为本技术实施例提供的第一种电子设备的部分结构俯视结构示例图以及悬臂梁的剖面结构示例图;
49.图3b为本技术实施例提供的第二种电子设备的部分结构俯视结构示例图以及悬臂梁的剖面结构示例图;
50.图3c为本技术实施例提供的悬臂梁的第一种实施例剖面结构示例图;
51.图4为本技术实施例提供的第一长度和第二长度之间的比值与蠕变速率的对应关系示例图;
52.图5为本技术实施例提供的悬臂梁的第二种实施例剖面结构示例图;
53.图6为本技术实施例提供的绝缘缓冲层的厚度和蠕变速率的对应关系示例图;
54.图7为本技术实施例提供的悬臂梁的第三种实施例剖面结构示例图;
55.图8a为本技术实施例提供的悬臂梁的第四种实施例剖面结构示例图;
56.图8b为本技术实施例提供的悬臂梁的第五种实施例剖面结构示例图;
57.图8c为本技术实施例提供的悬臂梁的第六种实施例剖面结构示例图;
58.图9a为本技术实施例提供的第三种电子设备的部分结构俯视结构示例图;
59.图9b为图9a所示的可动部件旋转的示例图;
60.图10a为本技术实施例提供的第一种悬臂梁本体的正投影结构示例图;
61.图10b为本技术实施例提供的第二种悬臂梁本体的正投影结构示例图;
62.图10c为本技术实施例提供的第三种悬臂梁本体的正投影结构示例图;
63.图10d为本技术实施例提供的第四种悬臂梁本体的正投影结构示例图;
64.图11为本技术实施例提供的电子设备的第二种实施例俯视结构示例图。
具体实施方式
65.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
66.本技术提供了一种电子设备。该电子设备可为mems器件。以下结合图1所示对本实施例提供的电子设备的结构进行说明,其中,图1为本技术实施例提供的电子设备的一种实施例俯视结构示例图。
67.该电子设备包括器件100。该器件100包括外框101以及可动部件102。具体地,可动部件102包括基座105,外框101具有镂空空间104。基座105位于该镂空空间104内。在基座105旋转的过程中,基座105不会接触外框101,有效的保证了外框101不会干涉基座105的旋转。基座105和外框101之间连接悬臂梁121以及悬臂梁130。本实施例对连接于基座105和外框101之间的悬臂梁的数量不做限定。以悬臂梁121为例,该悬臂梁121的两端分别与外框101和基座105连接,悬臂梁121用于将基座105支撑于外框101的镂空空间104内。
68.该可动部件102还包括固定于基座105表面的光电元件106以及导电线圈107。导电线圈107由电阻率较小的金属材质制成,导电线圈107在基座105的表面以特定的饶设方向饶设以形成特定的形状。本实施例对导电线圈107的具体形状以及设置位置不做限定,例如,该导电线圈107也可位于基座105的内部。导电线圈107位于磁场环境中,导电线圈107接收到电信号的情况下,导电线圈107能够受到磁场的作用,从而产生安培力。导电线圈107在该安培力的作用下,驱动基座105相对于外框101自由旋转。其中,电子设备可通过永磁体或者电磁铁为导电线圈107提供磁场。该永磁体或者电磁铁可为可动部件102内部的元件,或者,永磁体或者电磁铁还可为电子设备所包括的与可动部件102相互独立的元件。
69.本实施例所示的光电元件106可为mems微镜,发光器件,光探测器,陀螺仪或传感器等光电元件,该发光器件可为激光器,发光二极管(light emitting diode,led)或激光二极管(laser diode,ld)等。本实施例对光电元件106的具体器件类型不做限定。例如,光电元件106为激光器,本实施例所示的电子设备可应用于激光雷达等扫描领域。通过调整传输至导电线圈107的电信号的电流大小或电压大小的方式,以改变基座105相对于外框101旋转的角度,以实现对激光器偏转角度的调整。位于不同偏转角度的激光器能够向不同的方向发射检测光信号。向不同方向发射的检测光信号能够对不同方向进行扫描,以获取扫描对象的位置,高度,运动速度,姿态,形状等参数。又如,该光电元件106可为mems微镜,该电子设备可作为光开关应用至光交叉连接(optical cross connect,oxc),以实现全光通信。该电子设备也可应用于激光雷达等扫描领域,该电子设备还包括激光器,若光电元件106为mems微镜,mems微镜用于反射光信号,通过调整可动部件102的旋转角度的方式,以实现mems微镜不同角度的偏转,继而使得mems微镜能够将来自激光器的光信号,向不同的方向出射以实现扫描。
70.本实施例所示的悬臂梁121用于固定导线122。该导线122分别与可动部件102以及电子设备所包括的处理器110连接。处理器110经由导线122向可动部件102传输第一电信
号。例如,处理器110经由导线122与可动部件102所包括的导电线圈107连接,处理器110经由导线122向导电线圈107所发送的第一电信号用于使得导电线圈107产生安培力以驱动基座105相对于外框101自由旋转。又如,处理器110经由导线122与可动部件102所包括的光电元件106连接,处理器110经由导线122与光电元件106之间传输的第一电信号用于使得该光电元件106工作,具体地,若光电元件106为激光器,该第一电信号用于驱动该激光器发光。若光电元件106为传感器,该传感器将待测目标的信息转换为第一电信号,该传感器经由导线122向处理器110发送该第一电信号。
71.悬臂梁121用于固定导线122。在基座105相对于外框101自由旋转的过程中,旋转的基座105会扭转悬臂梁121,处于扭转状态的悬臂梁121会受到应力的作用。通过悬臂梁121所固定的导线122会受到应力。由金属材质制成的导线122在应力的作用下会发生蠕变现象。又如,电子设备还可包括驱动装置,该驱动装置与悬臂梁121连接。该驱动装置用于驱动悬臂梁121扭转。处于扭转状态的悬臂梁121会带动基座105相对于外框101自由旋转。具体地,金属中原子与原子的连接方式主要为金属键,金属键的特点是无方向性,滑移系统多,蠕变抗力较差。当金属遭受应力时,金属会发生蠕变现象。如图2所示,其中,图2为本技术实施例提供的导线在应力作用下的蠕变曲线示例图。该蠕变曲线的横坐标为时间,单位为毫秒。纵坐标为应力,单位为百兆帕。图2所示的坐标系中的蠕变曲线201是指金属在恒定温度下受到应力作用而变形的蠕变速率。图2所示在金属受到应力大小为a0的情况下,时间的推移会导致该金属发生蠕变,蠕变程度剧烈的情况下,会导致该金属出现剧烈的变形,失稳甚至断裂的危险。可见,为保证导线122结构的稳定,避免导线122的断裂危险等,需要避免导线122受到过大的应力(例如图2所示避免导线122受到的应力大于a0),以降低导线的蠕变速率,避免导线122出现断裂的危险。而且即便导线122的蠕变程度不剧烈,也会导致可动部件的旋转的角度造成偏差或抖动,进而影响了可动部件的稳定性。以下对悬臂梁的可选结构进行示例性说明。
72.悬臂梁结构1
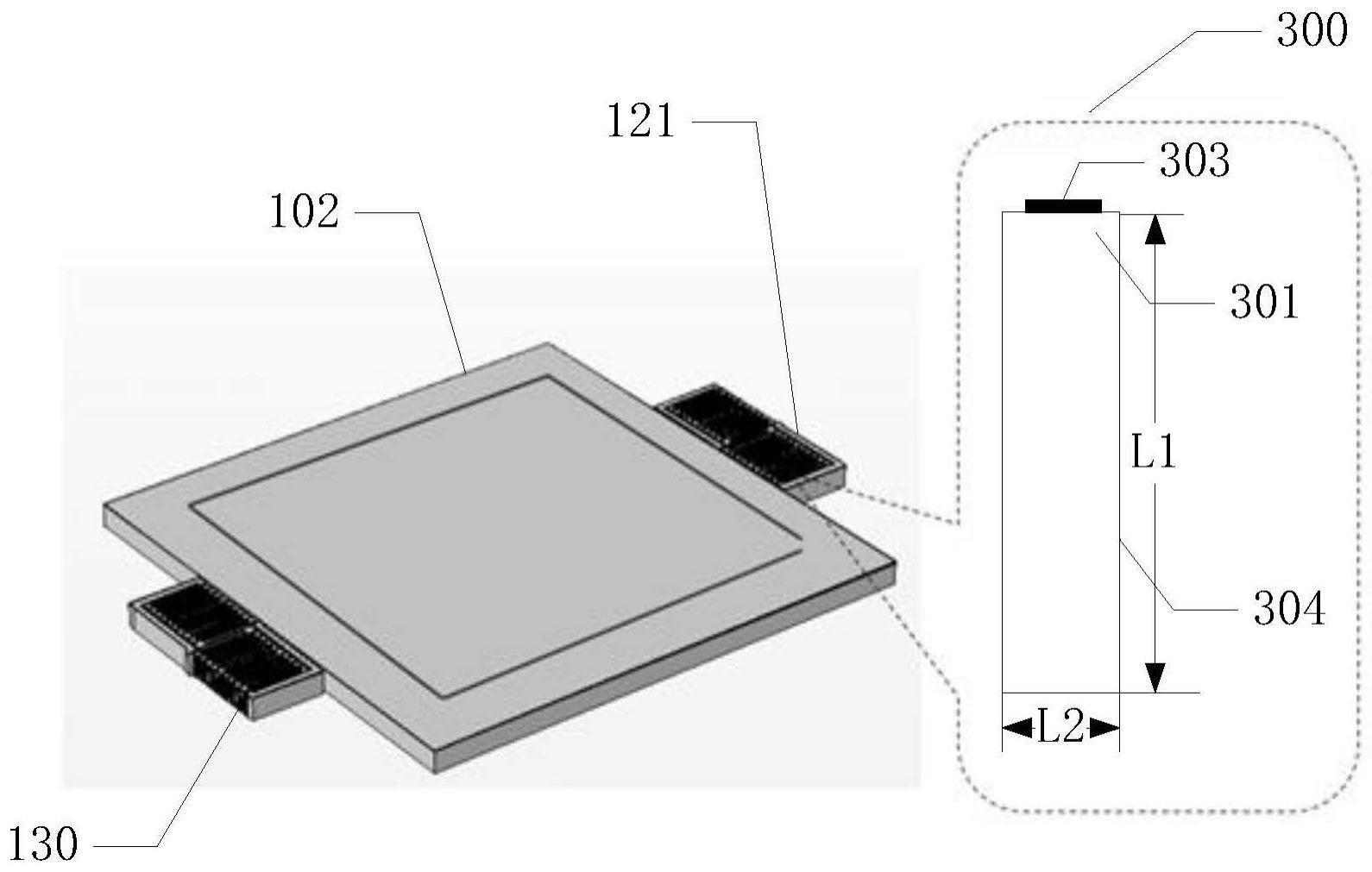
73.参见图3a,图3b和图3c所示,图3a为本技术实施例提供的第一种电子设备的部分结构俯视结构示例图以及悬臂梁的剖面结构示例图。图3b为本技术实施例提供的第二种电子设备的部分结构俯视结构示例图以及悬臂梁的剖面结构示例图。图3c为本技术实施例提供的悬臂梁的第一种实施例剖面结构示例图。具体地,通过切面310切割悬臂梁121以获取悬臂梁121的横截面300。其中,所述悬臂梁121的轴向方向平行于该切面310。可以理解,该切面310能够对悬臂梁121做垂直剖切以获取悬臂梁的横截面300。在图3a所示的示例中,用于获取悬臂梁121横截面300的切面310为垂直于可动部件102表面的方向。该悬臂梁121的横截面300具有第一长度l1和第二长度l2。悬臂梁具有第二长度l2的端部301用于固定第一导线303。具体地,该悬臂梁具有第二长度l2的端部301的表面固定第一导线303。需明确的是,上述所示的悬臂梁121的横截面300的定义是本领域技术人员通知的定义。
74.本实施例所示以通过与悬臂梁的轴向方向平行的切面获取该横截面为例进行示例性说明,具体不做限定。在其他示例中,也可通过与悬臂梁的轴向方向呈垂直角度,呈任意锐角,或任意钝角的切面,以获取该横截面。
75.需明确的是,本实施例以悬臂梁121的轴向方向垂直于可动部件102表面为例进行示例性说明,在其他示例中,悬臂梁121的轴向方向也可与可动部件102表面呈任意非垂直
的角度,具体不做限定,只要悬臂梁具有第二长度l2的端部301用于固定第一导线303即可。
76.第一长度l1大于第二长度l2,且在悬臂梁扭转的情况下,能够使得端部301的应力小于悬臂梁具有第一长度l1的侧壁304的应力。可以理解,在悬臂梁扭转的情况下,应力向侧壁304分布,降低了分布于端部301的应力,有效地避免了第一导线303失稳,提高了第一导线303结构的稳定。
77.结合图4所示进行说明,其中,图4为本技术实施例提供的第一长度和第二长度之间的比值与蠕变速率的对应关系示例图。图4所示的横坐标为目标比值,该目标比值为第一长度l1和第二长度l2之间的比值。
78.图4所示的曲线401为第二长度l2为5微米(um)的情况下,不同的目标比值与蠕变速率的对应关系。曲线402为第二长度l2为3um的情况下,不同的目标比值与蠕变速率的对应关系。在同一第二长度的情况下(例如曲线401或曲线402),目标比值与蠕变速率之间呈负相关关系,即同一第二长度下,目标比值越大,蠕变速率越小。例如,在第二长度l2为5um的情况下,目标比值越大,该悬臂梁的端部所固定的第一导线的蠕变速率越小。
79.可见,为保证悬臂梁扭转的过程中,端部301的应力小于侧壁304的应力,以降低悬臂梁的端部301所固定的第一导线303的蠕变速率,可使得目标比值为大于或等于5且小于或等于20的区间内的任一数值。例如,本实施例所示的目标比值可为10。在目标比值为10的情况下,有效地降低了悬臂梁的端部301所固定的第一导线303所受到的应力,降低了第一导线303的蠕变速率。
80.本实施例所示的悬臂梁在具有该目标比值的情况下,会导致悬臂梁的侧壁304具有较大的长度,有效地提高了悬臂梁沿轴向方向的刚度,提升了悬臂梁抗冲击的力度,避免悬臂梁出现断裂的情况,提升了悬臂梁的使用寿命。
81.悬臂梁结构2
82.参见图5所示,图5为本技术实施例提供的悬臂梁的第二种实施例剖面结构示例图。对本实施例所示的悬臂梁的结构的说明请参见悬臂梁结构1所示,具体不做赘述。本实施例所示的悬臂梁还包括位于所述悬臂梁的端部501的表面和第一导线503之间的绝缘缓冲层502。该绝缘缓冲层502能够有效地降低悬臂梁的端部501的应力传递至第一导线503上的大小,更有效地降低第一导线503的蠕变速率。
83.例如,悬臂梁具体包括悬臂梁本体511,以及悬臂梁本体511表面的绝缘缓冲层502,该悬臂梁本体511可由单晶硅(silicon,si)制成,绝缘缓冲层502可由氧化硅(silica,sio2)制成。本实施例所示的绝缘缓冲层502的杨氏模量小于悬臂梁本体511的杨氏模量。绝缘缓冲层502的杨氏模量是指绝缘缓冲层502抵抗形变的物理量。悬臂梁本体511的杨氏模量是指悬臂梁本体511抵抗形变的物理量。在绝缘缓冲层502的杨氏模量小于悬臂梁本体511的杨氏模量的情况下,悬臂梁本体511表面的应力能够集中于悬臂梁本体511和绝缘缓冲层502之间,绝缘缓冲层502能够有效地降低传递至第一导线503上的应力大小。可以理解,该绝缘缓冲层501导致悬臂梁结构2的第一导线503所受到的应力,相对于悬臂梁结构1的第一导线303所受到的应力,能够进一步降低。
84.以下对本实施例所示的绝缘缓冲层502有效地降低传递至第一导线503的应力大小的可选结构进行说明:
85.可选结构1
86.绝缘缓冲层502由孔隙率小于致密阈值的介电材料制成。在绝缘缓冲层502的孔隙率小于致密阈值的情况下,该绝缘缓冲层502结构致密。结构致命的绝缘缓冲层502能够更有效地降低传递至第一导线503上的应力大小。
87.可选结构2
88.绝缘缓冲层502的杨氏模量大于或等于压强阈值。本实施例所示的阈值可为10吉帕(gpa)。在绝缘缓冲层502的杨氏模量大于或等于压强阈值的情况下,该绝缘缓冲层502抗形变的能力能够有效地阻碍应力传递至第一导线503上。
89.可选结构3
90.绝缘缓冲层502沿所述悬臂梁轴向的厚度大于或等于厚度阈值。结合图6所示,其中,图6为本技术实施例提供的绝缘缓冲层的厚度和蠕变速率的对应关系示例图。如图6所示可知,绝缘缓冲层502的厚度与第一导线502的蠕变速率之间呈负相关关系。可以理解,绝缘缓冲层502的厚度越厚,那么传递至第一导线502上的应力越小,进而导致第一导线502的蠕变速率越低。本实施例所示,在厚度阈值取值为0.2um的情况下,位于绝缘缓冲层502表面的第一导线503的蠕变速率较低,不会引起第一导线503的失稳。
91.可选结构4
92.所述绝缘缓冲层502的表面覆盖绝缘覆盖层504,所述第一导线503位于所述绝缘缓冲层502和所述绝缘覆盖层504之间。本实施例对绝缘覆盖层504的杨氏模量不做限定,该绝缘覆盖层504能够吸收绝缘缓冲层502表面的应力,避免绝缘缓冲层502表面的应力全部集中于第一导线503上,有效地降低了传递至第一导线503上的应力大小。
93.悬臂梁结构3
94.参见图7所示,其中,图7为本技术实施例提供的悬臂梁的第三种实施例剖面结构示例图。本实施例所示的悬臂梁包括悬臂梁的端部701,对悬臂梁的端部701的具体说明,请参见上述悬臂梁结构1所示,具体不做赘述。该悬臂梁的端部701具有穿槽702。悬臂梁所包括的第二导线703穿过穿槽702设置。可以理解,穿过该穿槽702的第二导线703连接在处理器和可动部件之间。穿槽702槽底和第二导线703之间还包括绝缘缓冲层704。对该绝缘缓冲层704的说明,请参见悬臂梁结构3所示,具体不做赘述。
95.悬臂梁结构4
96.上述悬臂梁结构1至悬臂梁结构3中,以悬臂梁的端部固定一个导线为例,本示例所示的悬臂梁的端部固定多个导线。例如图8a所示,其中,图8a为本技术实施例提供的悬臂梁的第四种实施例剖面结构示例图。
97.本实施例所示的悬臂梁端部表面固定多个第一导线801,且多个第一导线801呈阵列式排列。具体地,悬臂梁端部的表面所固定的多个第一导线801呈n行m列排列,该m和n分别为取值为大于或等于1的任意正整数。如图8a所示的示例,该悬臂梁固定包括三行两列共六个第一导线801。可知,本示例所示的绝缘覆盖层802位于第一导线801和绝缘缓冲层803之间,且绝缘覆盖层802位于相邻的两个第一导线801之间。对绝缘覆盖层802和绝缘缓冲层803的说明,请参见悬臂梁结构2至3所示,具体不做赘述。本实施例以悬臂梁所固定的多个第一导线801呈阵列式排列为例进行示例性说明,在其他示例中,悬臂梁所固定的多个第一导线801也可随机排列,只要位置相邻的两个导线之间通过绝缘覆盖层802彼此绝缘即可。
98.本实施例所示的悬臂梁的结构,有效地增加了悬臂梁所固定的第一导线的数量,
提高了处理器与可动部件之间传输电信号的效率。
99.图8a所示以悬臂梁所固定的多个第一导线均位于悬臂梁的端部表面上为例,在图8b所示的示例中,悬臂梁所固定的多个第二导线811也可均位于悬臂梁端部的穿槽812内,对第二导线811固定于穿槽812内的结构的说明,请参见悬臂梁结构3所示,具体不做赘述。图8c所示的示例中,悬臂梁所固定的多个导线中,包括固定于悬臂梁的端部表面上的多个第一导线821,还包括固定于悬臂梁端部的穿槽内的多个第二导线822。对固定于悬臂梁的端部表面上的第一导线821的结构的说明,请参见悬臂梁结构1所示,具体不做赘述,对固定于悬臂梁的端部穿槽内的第二导线822的结构的说明,请参见悬臂梁结构3所示,具体不做赘述。
100.由图1对应的实施例所示可知,本实施例所示的悬臂梁所固定的多个导线位于磁场环境中,因此,悬臂梁所固定的多个导线会产生洛伦兹力。洛伦兹力是指磁场对导线中的运动电荷的作用力。导线所产生的洛伦兹力会串扰可动部件所包括的导电线圈导所产生安培力,从而导致导电线圈所产生的安培力无法准确将光电元件106偏转至目标角度。为此,本实施例所示的悬臂梁固定的多个导线所传输的第一电信号满足目标条件。其中,目标条件为悬臂梁所固定的多个导线中,包括传输第一电信号方向相反的两个导线。为尽可能的避免导线所产生的洛伦兹力对导电线圈导所产生安培力的串扰,该目标条件具体指第一电流值和第二电流值相同。悬臂梁所固定的多个导线中,所有沿第一方向传输的所述第一电信号的电流值的和为第一电流值。悬臂梁所固定的多个导线中,所有沿第二方向传输的所述第一电信号的电流值的和为第二电流值。第一方向和第二方向相反。
101.本实施例所示在悬臂梁固定的多个导线所传输的第一电信号满足目标条件的情况下,多个导线之间所产生的洛伦兹力相互抵消,从而有效地避免了导线所产生的洛伦兹力对导电线圈导所产生安培力的串扰,尽可能的避免光电元件所偏转的目标角度的误差。例如,若悬臂梁固定两个导线,两个导线分别传输的第一电信号的方向相反,而分别传输的电流值相同。那么,这两个导线所产生的洛伦兹力相互抵消,即两个导线所产生的洛伦兹力的合力为零,不会对光电元件的偏转造成串扰。
102.例如图9a所示,其中,图9a为本技术实施例提供的第三种电子设备的部分结构俯视结构示例图。该电子设备包括两对悬臂梁,第一对悬臂梁包括悬臂梁951以及悬臂梁952。第二对悬臂梁包括悬臂梁953以及悬臂梁954。本实施例对每对悬臂梁所包括的悬臂梁的具体数量不做限定。第一对悬臂梁用于驱动可动部件850沿y轴旋转。具体地,悬臂梁951以及悬臂梁952位于可动部件850沿x轴的两侧。第二对悬臂梁用于驱动可动部件850沿x轴旋转。具体地,悬臂梁953以及悬臂梁954位于可动部件850沿y轴的两侧。本实施例所示的各悬臂梁固定的多个导线所传输的电信号满足上述所示的目标条件,对目标条件不做赘述。
103.结合图9b,表1和表2所示,其中,图9b为图9a所示的可动部件旋转的示例图。图9a所示的悬臂梁用于驱动图9b所示的可动部件沿x轴旋转以及沿y轴旋转。
104.表1
[0105][0106]
表2
[0107][0108]
表1所示表示,与可动部件910所连接的悬臂梁向可动部件910所传输的电信号用于驱动可动部件910沿x轴旋转的角度为6.5。但是,在悬臂梁所固定的多个导线传输该电信号的过程中产生洛伦兹力,导致可动部件910沿x轴旋转的角度为6.5的情况下,还会导致该可动部件910沿y轴偏转的角度θ1=0.54。可以理解,悬臂梁所固定的导线产生的洛伦兹力会对可动部件910沿x轴的旋转造成串扰,导致该可动部件910沿y轴偏转了一定的角度。
[0109]
表2所示表示,与可动部件911所连接的悬臂梁向可动部件911所传输的电信号用于驱动可动部件911沿x轴旋转的角度为6.5。因在悬臂梁所固定的多个导线传输该电信号的过程中所产生洛伦兹力相互抵消,使得可动部件911沿x轴旋转的角度为6.5的情况下,该可动部件911沿y轴所偏转的角度为0。
[0110]
继续结合图9b,表3以及表4所示;
[0111]
表3
[0112][0113]
表4
[0114][0115]
表3所示表示,可动部件912所连接的悬臂梁向可动部件912所传输的电信号用于驱动可动部件912沿y轴旋转的角度为6.5。但是,在悬臂梁所固定的多个导线所传输的该电信号的过程中产生洛伦兹力,导致可动部件912沿y轴旋转的角度为6.5的情况下,还会导致该可动部件912沿x轴偏转的角度θ2=0.03。可以理解,悬臂梁所固定的导线产生的洛伦兹力会对可动部件912沿y轴的旋转造成串扰,导致该可动部件912沿x轴偏转了一定的角度。
[0116]
表4所示表示,与可动部件913所连接的悬臂梁所固定的多个导线传输该电信号的过程中所产生的洛伦兹力相互抵消,使得可动部件913沿y轴旋转的角度为6.5的情况下,该可动部件913沿y轴偏转的角度为0。
[0117]
可见,采用本实施例所示的悬臂梁能够在多个导线传输该电信号的过程中所产生洛伦兹力相互抵消,有效地避免了对可动部件旋转过程中的串扰。
[0118]
上述悬臂梁结构中,为进一步降低传递至导线上的应力大小,以降低导线的蠕变速率,本实施例所示的沿悬臂梁的轴向方向,导线的厚度小于或等于高度阈值。在导线的厚度小于或等于高度阈值的情况下,降低了导线的厚度,有效地降低了传递至导线上的应力。本实施例所示的高度阈值可为悬臂梁第一长度的10%。本实施例以所述导线的厚度为悬臂梁的第一长度的4%为例。
[0119]
上述悬臂梁结构中,悬臂梁本体已掺杂,已掺杂的悬臂梁本体具有导电性能。例如,已掺杂的悬臂梁本体的导电率大于或等于0.1西门子每米(s/m)。已掺杂的悬臂梁本体分别与处理器和可动部件连接。可知,处理器经由悬臂梁所固定的导线与可动部件之间传输第一电信号。处理器经由悬臂梁所包括的悬臂梁本体与可动部件之间传输第二电信号。
具体说明可参见下述示例所示:
[0120]
示例1,已掺杂的悬臂梁本体与可动部件所包括的导电线圈连接。那么,已掺杂的悬臂梁本体向导电线圈传输第二电信号,导电线圈接收到第二电信号的情况下产生安培力,该安培力的说明,请参见图1对应的实施例,具体不做赘述。悬臂梁固定的导线与光电元件所传输的第一电信号用于驱动光电元件工作,如,第一电信号驱动激光器发光。
[0121]
示例2,已掺杂的悬臂梁本体与光电元件连接。已掺杂的悬臂梁本体与光电元件所传输的第二电信号用于驱动光电元件工作。而悬臂梁固定的导线向导电线圈传输的第一电信号用于使得导电线圈产生安培力。
[0122]
本实施例提供的悬臂梁本体能够有效地释放应力,从而降低传递至导线的应力大小。其中,悬臂梁本体的正投影是指,悬臂梁本体在多路投影线照射下于投影面上的成像,多路投影线均平行于悬臂梁的轴向方向,且垂直于该投影面。例如,悬臂梁本体的正投影呈折叠型,且折叠成弹簧结构,具体参见如图10a和图10b所示。具体地,悬臂梁本体的正投影包括多对折叠梁。一对折叠梁包括依次连接的折叠梁1001和折叠梁1002,折叠梁1001和折叠梁1002之间具有夹角,该夹角可为图10a和图10b所示的90度,在其他示例中,该夹角可为任意角度的锐角,或任意角度的钝角。本实施例对悬臂梁本体的正投影所包括的折叠梁的对数不做限定。
[0123]
如图10c所示,该悬臂梁本体的正投影呈y形。此示例下折叠梁1011和折叠梁1012之间的夹角等于折叠梁1011和折叠梁1013之间的夹角,且均为钝角。折叠梁1012和折叠梁1013之间的夹角为锐角,本示例对具有的角度大小不做限定。又如图10d所示,该悬臂梁本体的正投影呈u形。可知,悬臂梁本体的正投影所包括的一对折叠梁中,折叠梁1021呈矩形结构,而折叠梁1022呈弧形结构。
[0124]
本实施例对悬臂梁本体的正投影所呈形状的说明为可选地示例,具体不做限定,可以理解,本实施例所示的悬臂梁本体的正投影包括一对或多对折叠梁,每对折叠梁包括依次连接的两个折叠梁,两个折叠梁之间的夹角呈非180度的任意角度即可。采用本实施例所示的悬臂梁本体的结构,悬臂梁本体扭转的过程中,悬臂梁本体的应力能够有效地分散于悬臂梁本体内,提高了通过悬臂梁本体所释放的应力,降低了传递至悬臂梁所固定的导线上的应力大小。
[0125]
上述实施例以悬臂梁连接于外框和可动部件之间为例,在本实施例中,电子设备还包括连接于两个可动部件之间的悬臂梁。如图11所示,其中,图11为本技术实施例提供的电子设备的第二种实施例俯视结构示例图。图11所示的电子设备包括外框1110以及位于外框1110镂空空间内部的多个可动部件,且电子设备所包括的多个可动部件呈阵列式的排列方式为例,例如图11所示的可动部件1101,可动部件1102,可动部件1103以及可动部件1104呈两行两列的方式排列。本实施例对电子设备所包括的可动部件的数量以及排列的方式不做限定。本实施例所示的各可动部件的结构的说明,请参见图1对应的实施例的说明,具体不做赘述。
[0126]
可动部件和外框1110之间的悬臂梁的结构请参见上述所示,具体不做赘述。本实施例所示的位置相邻的两个可动部件之间还连接悬臂梁,如连接在可动部件1101和可动部件1102之间的悬臂梁1121。悬臂梁1201的结构可参见上述所示,具体不做赘述。
[0127]
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前
述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!