一种自动化木板切割装置的制作方法-j9九游会真人
1.本发明属于自动化制造技术领域,特别的涉及一种自动化木板切割装置。
背景技术:
2.在将木板生产出来时,木板的形状大多不是所需要的大小,所以在实际使用时,需要工人使用切割工具将木板切割为适合的形状,较为繁琐,并且,传统的切割工具在切割木板时,切割的长度和宽度都需要手动测量,当需要对多块木板进行切割工作时,一方面需要消耗较长的时间,另一方面,人工不断的进行测量,会产生测量误差,无法保证切割完成每块木板的长度和宽度相同。
技术实现要素:
3.基于此,有必要提供一种自动化木板切割装置;为解决上述背景技术中提出的问题。本发明提供如下技术方案:一种自动化木板切割装置,包括定位机构;所述定位机构包括二号柱,所述二号柱上设置有二号伸缩柱,所述二号伸缩柱的周围设置有二号弹簧,所述二号伸缩柱上设置有旋转凸台,所述箱体的二号滑轨上设置有滑块,所述滑块与箱体的侧壁进行螺栓连接,所述滑块上设置有二号转轴和限位块,所述二号转轴上设置有连接块,所述连接块与二号转轴转动连接,所述连接块的另一端设置有三号转轴,所述三号转轴上设置有传动板,所述传动板上设置有若干定位孔。
4.进一步的,所述切割机构包括一号柱和二号伸缩杆;所述一号柱的顶部设置有一号槽,所述一号槽内设置有一号切割刀,所述一号柱的侧壁设置有一号电机,所述一号切割刀与一号电机的转轴转动连接,所述一号柱的侧壁还设置有一号位置传感器,所述二号伸缩杆上设置有二号凸台和二号切割刀,所述二号伸缩杆通过二号凸台与一号弹簧连接,所述二号伸缩杆的端部设置有二号电机,所述二号伸缩杆的端部还设置有二号位置传感器。
5.进一步的,所述运输机构包括滚轮和输送机,所述滚轮上下安装在电机箱上,所述滚轮上设置有一号转轴,所述滚轮通过一号转轴与电机箱内的电机转轴转动连接,所述输送机设置在侧门上。
6.进一步的,所述旋转凸台与二号伸缩柱转动连接,且所述旋转凸台和二号伸缩柱的连接处设置有扭簧。
7.进一步的,所述二号转轴穿过定位孔与箱体的侧壁螺栓连接。
8.进一步的,所述一号位置传感器和二号位置传感器连接。
9.进一步的,所述旋转凸台和二号柱之间设置有二号伸缩柱和二号弹簧。
10.进一步的,所述一号柱通过一号伸缩杆与一号滑轨滑动连接。
11.进一步的,所述二号伸缩杆到压台的距离与旋转凸台压缩二号弹簧的距离相同。
12.进一步的,所述传动板的移动距离与旋转凸台移动到二号凸台的距离相同。
13.与现有技术相比,本发明的有益效果是:通过设置切割机构中的一号位置传感器和二号位置传感器作用一号伸缩杆和二
号伸缩杆实现对每块木板切割宽度的固定;通过设置定位机构中的限位块、连接杆传动板和旋转凸台共同作用使每次传动板位移距离相同达到对每块木板切割长度的固定;进而在实现自动切割木板同时,保证每块木板切割的长度和宽度相同。
附图说明
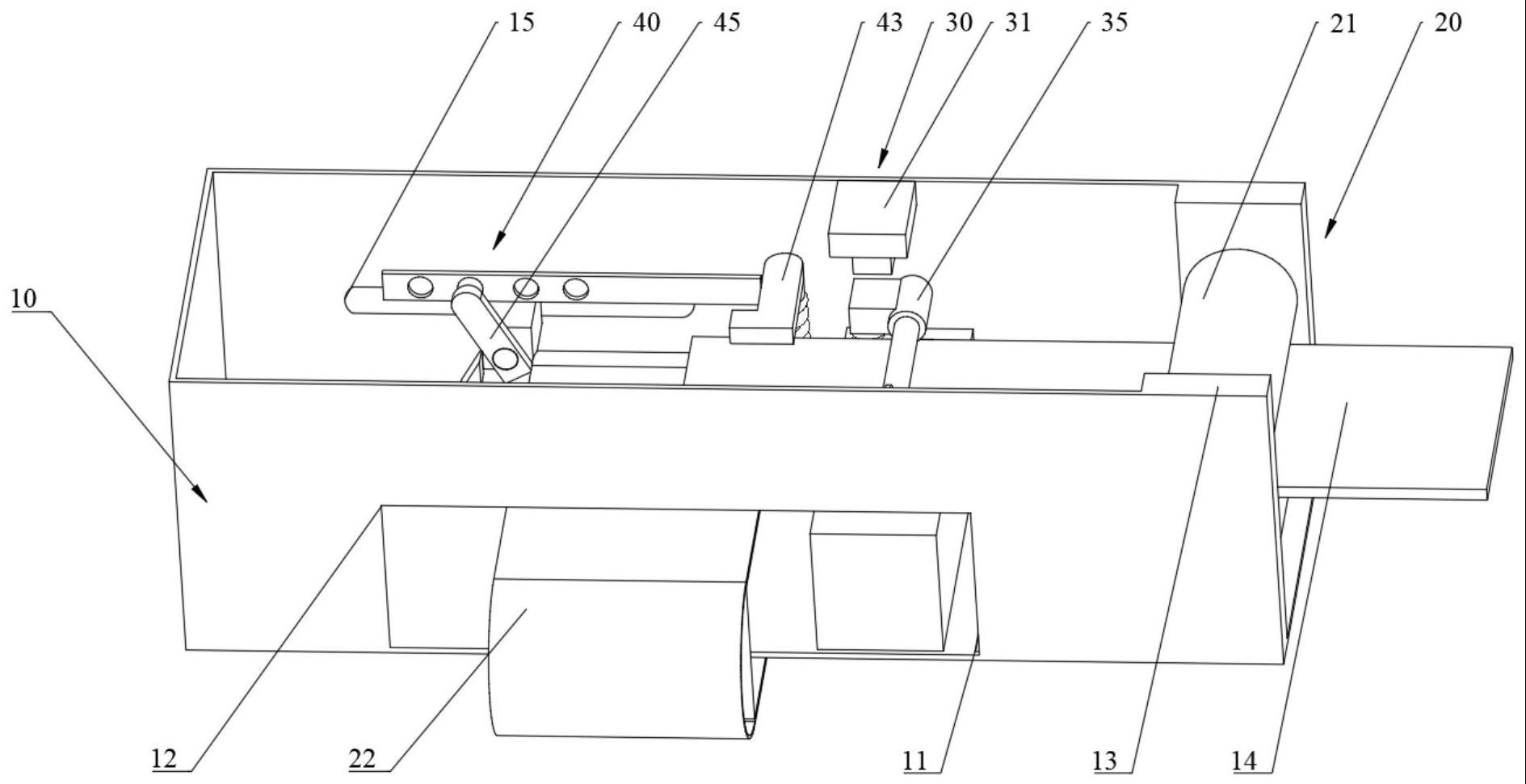
14.图1为切割装置的立体图;图2为切割装置的俯视图;图3为切割装置去除侧壁的侧视图;图4为木板初始状态的立体图;图5为木板切割状态的立体图;图6为图4的局部放大图。
15.图中:10、箱体;11、一号滑轨;111、一号伸缩杆;12、侧门;13、电机箱;14、木板;15、二号滑轨;20、运输机构;21、滚轮;211、一号转轴;22、输送机;30、切割机构;31、压机;311、压块;32、压台;321、一号凸台;33、一号柱;331、一号槽;332、一号切割刀;333、一号电机;334、一号位置传感器;34、一号弹簧;341、一号伸缩柱;35、二号伸缩杆;351、二号凸台;352、二号切割刀;353、二号电机;354、二号位置传感器;40、定位机构;41、二号柱;411、二号伸缩柱;42、二号弹簧;43、旋转凸台;431、扭簧;44、滑块;441、二号转轴;442、限位块;45、连接块;451、三号转轴;46、传动板;461、定位孔。
具体实施方式
16.下面结合实施例对本发明做进一步的描述。
17.以下实施例用于说明本发明,但不能用来限制本发明的保护范围。实施例中的条件可以根据具体条件做进一步的调整,在本发明的构思前提下对本发明的方法简单改进都属于本发明要求保护的范围。
18.请参阅图1到图6,本发明提供一种自动化木板切割装置,包括箱体10、运输机构20、切割机构30和定位机构40;所述箱体10包括一号滑轨11;所述一号滑轨11设置在箱体10的底部,所述一号滑轨11上设置有一号伸缩杆111,所述一号伸缩杆111可以在一号滑轨11内进行伸缩移动,所述箱体10的侧壁开设有侧门12,所述箱体10的右端设置有电机箱13,所述电机箱13内设置有电机用于后续的传动,所述箱体10的另一侧壁设置有二号滑轨15,所述运输机构20设置在箱体10的右侧部分,所述运输机构20包括滚轮21和输送机22,所述滚轮21设置有两个,分布上下位置安装在电机箱13上,所述滚轮21上设置有一号转轴211,所述滚轮21通过一号转轴211与电机箱13内的电机转轴转动连接,通过电机转动带动滚轮21旋转,所述两个滚轮21中间设置有间隙,所述木板14可以穿过间隙,在两个滚轮21的作用下由右向左移动,所述运输机构20还包括输送机22,所述输送机22安装在侧门12的一侧,通过输送机22将后续切割的木板14运输出去。
19.请参阅图1到图6,所述切割机构30包括压机31,所述压机31设置在箱体10的侧壁,所述压机31上设置有压块311,所述压块311可以在压机31的作用下进行上下移动,所述压机31的正下方设置有压台32,所述压台32上设置有一号凸台321,所述木板14在一号凸台321上进行切割,所述压台32和滚轮21中间设置有一号柱33,所述一号柱33的顶部设置有一
号槽331,所述一号槽331内设置有一号切割刀332,所述一号柱33的侧壁设置有一号电机333,所述一号切割刀332与一号电机333的转轴转动连接,通过一号电机333的作用带动一号切割刀332旋转对木板14就行切割,所述一号柱33的侧壁还设置有一号位置传感器334,所述一号柱33的底部与一号伸缩杆111螺栓连接,所述一号柱33通过一号伸缩杆111与一号滑轨11滑动连接,所述一号柱33可以在一号伸缩杆111的作用下在一号滑轨11上进行左右方向的移动,用于控制一号切割刀332切割木板14的宽度。
20.请参阅图1到图6,所述压台32上设置有一号弹簧34,所述一号弹簧34的底端与压台32连接,所述一号弹簧34的中间设置有一号伸缩柱341,所述一号伸缩柱341上设置有二号伸缩杆35,所述二号伸缩杆35上设置有二号凸台351和二号切割刀352,所述二号伸缩杆35通过二号凸台351与一号弹簧34连接,所述二号伸缩杆35的端部设置有二号电机353,所述二号切割刀352在二号电机353的作用下对木板14进行横向切割,所述二号伸缩杆35的端部还设置有二号位置传感器354,所述二号位置传感器354与一号位置传感器334连接,当二号伸缩杆35进行伸缩切割时,二号位置传感器354接收一号位置传感器334的信号,进行切割长度的测量,当木板14运输至压台32上时,所述二号伸缩杆35距离压台32有一定的距离,防止二号切割刀352直接作用在木板14上。
21.请参阅图1到图6,所述定位机构40包括二号柱41,所述二号柱41上设置有二号伸缩柱411,所述二号伸缩柱411的周围设置有二号弹簧42,所述二号伸缩柱411上设置有旋转凸台43,所述旋转凸台43与二号伸缩柱411转动连接,所述旋转凸台43可以围绕二号伸缩柱411旋转的同时进行下压,所述旋转凸台43和二号伸缩柱411的连接处还设置有扭簧431,在旋转凸台43旋转过后,通过扭簧431的作用力恢复初始角度,所述旋转凸台43可以旋转至二号伸缩杆35上方,压机31带动压块311下压旋转凸台43,旋转凸台43压缩二号弹簧42和二号伸缩柱411接触二号伸缩杆35,进而二号伸缩杆35压缩一号弹簧34和一号伸缩柱341下压使二号切割刀352作用在木板14上就行切割。
22.请参阅图1到图6,所述箱体10的二号滑轨15上设置有滑块44,所述滑块44与箱体10的侧壁进行螺栓连接,通过旋松和拧紧螺栓使滑块44在二号滑轨15上滑动和固定,所述滑块44上设置有二号转轴441和限位块442,所述二号转轴441上设置有连接块45,所述连接块45与二号转轴441转动连接,所述连接块45可以围绕二号转轴441进行旋转,所述二号转轴441在旋转的时候接触到限位块442停止转动,达到限位的作用,所述连接块45的另一端设置有三号转轴451,所述三号转轴451上设置有传动板46,所述传动板46上设置有定位孔461,所述传动板46通过定位孔461与三号转轴451螺栓连接进行固定,使传动板46的与箱体10的底板平行,在木板14运输至连接块45处时,木板14推动连接块45围绕二号转轴441进行旋转,连接块45旋转时带动传动板46进行平行移动,直至连接块45抵紧限位块442,传动板46推动旋转凸台43旋转至二号伸缩杆35上方,在压机31的作用下,完成对木板14的切割后,旋转凸台43在扭簧431的作用下恢复并将传动板46推回原来的位置,切割完成的木板14由输送机22运输出去。
23.本发明的工作原理及使用流程:首先,将木板14穿过两个滚轮21中间的间隙,通过两个滚轮21转动带动木板14由右向左运动,根据所需木板14的宽度,通过一号伸缩杆111调节一号切割到332的距离进行木板14的切割,木板14在滚轮21的作用下继续前进,在木板14运输至接触连接块45处时,木板14推动连接块45围绕二号转轴441进行旋转,连接块45旋转
时带动传动板46进行平行移动,直至连接块45抵紧限位块442,传动板46推动旋转凸台43围绕二号伸缩柱411旋转,直至旋转凸台43运动到二号伸缩杆35上方,在压机31的作用下,压机31带动压块311下压旋转凸台43,旋转凸台43压缩二号弹簧42和二号伸缩柱411接触二号伸缩杆35,进而二号伸缩杆35压缩一号弹簧34和一号伸缩柱341下压使二号切割刀352作用在木板14上,通过二号伸缩杆35的伸缩移动进行切割,在完成对木板14的切割后,旋转凸台43在扭簧431的作用下恢复并将传动板46推回原来的位置,切割完成的木板14由输送机22运输出去。
24.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
当前第1页1
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!