与叉车行驶速度关联的转向调速控制系统的制作方法-j9九游会真人
1.本发明涉及叉车技术领域,尤其涉及与叉车行驶速度关联的转向调速控制系统。
背景技术:
2.在驾驶前移式叉车时,快速打方向盘意味着驾驶员要紧急转向,但是快速打方向盘转向圈数太多,影响作业效率和体验感;转向圈数改少后,在高速直行时,驾驶员轻打方向盘,叉车又很容易跑偏,不容易控制车辆直线行驶。
技术实现要素:
3.基于背景技术存在的技术问题,本发明提出了与叉车行驶速度关联的转向调速控制系统,能够根据叉车方向盘输出的实时转动信号和车辆行驶速度信号,来驱动转向电机调速运行,既能满足叉车快打方向盘时快速转向,又能保证叉车高速行驶时轻打方向盘,即慢速转向及无转向状态下转向电机的低速运行,使叉车更加节能、降噪。
4.本发明提出的与叉车行驶速度关联的转向调速控制系统,包括叉车方向盘、感应方向盘转动信号的方向盘转角传感器、转向信号处理器、转向电机控制器、转向电机、转向电机速度编码器、减速箱、车轮、蓄电池、牵引电机控制器、牵引电机和牵引电机速度编码器,所述转向电机控制器预先存储有牵引电机速度编码器发出的叉车行驶速度信号所对应的转向电机的减速率;所述牵引电机速度编码器向转向电机控制器和牵引控制器实时反馈速度信号,转向电机控制器依据接收到的叉车行驶速度信号,得出对应转向电机的减速率以调节电机转速。
5.优选地,所述牵引电机速度编码器集成在牵引电机上,用于检测叉车行驶速度数据,并实时反馈给所述牵引电机控制器和转向电机控制器。
6.优选地,所述转向电机控制器接收到转向信号处理器提供的转向控制电压信号和牵引电机速度编码器提供的速度脉冲信号,并通过如下公式计算出转向电机的转速:
[0007][0008]
式中:n为转向电机转速,r/min;im为传动比;v为叉车行驶速度,m/s;w为转向修正系数,当行驶速度位于低速区0-a1区域时,w=1,当行驶速度位于高速区a1-a2区域是,w=4;f为摩擦系数;b为驱动轮半径,m。
[0009]
优选地,所述方向盘转角传感器与叉车方向盘的转动轴通过联轴器相连接,是用来检测方向盘的转动角度和转向方向。
[0010]
优选地,所述转向信号处理器与方向盘转角传感器连接,并用于将脉冲信号处理为控制电压信号。
[0011]
优选地,所述转向电机速度编码器与转向电机控制器、转向电机形成一个闭环控制,所述转向电机速度编码器用于将转向电机的实时转速反馈给转向电机控制器。
[0012]
优选地,所述牵引电机速度编码器与牵引电机控制器、牵引电机形成一个闭环控
制;所述牵引电机速度编码器用于将牵引电机的实时转速反馈给牵引电机控制器。
[0013]
优选地,所述减速箱用于在转向电机和车轮之间匹配转速,实现降低转速增加扭矩的目的;所述蓄电池作为电源,给转向电机控制器和牵引电机控制器供电。
[0014]
本发明的有益技术效果:
[0015]
本发明通过方向盘启动转角传感器的信号来控制车辆的转向输出,控制器通过接收车辆行驶速度信号和转向信号,来控制转向电机转速,当车速较高时,即驾驶员微动方向盘,转向电机以较低的转速运行,当车速较低时或静止原地转向状态下,即驾驶员快打方向盘,转向电机以较高的转速运行;通过转向电机的调速,既能满足叉车快打方向盘时快速转向,又能保证叉车高速行驶时轻打方向盘,即慢速转向及无转向状态下转向电机的低速运行,使叉车更加节能、降噪。
附图说明
[0016]
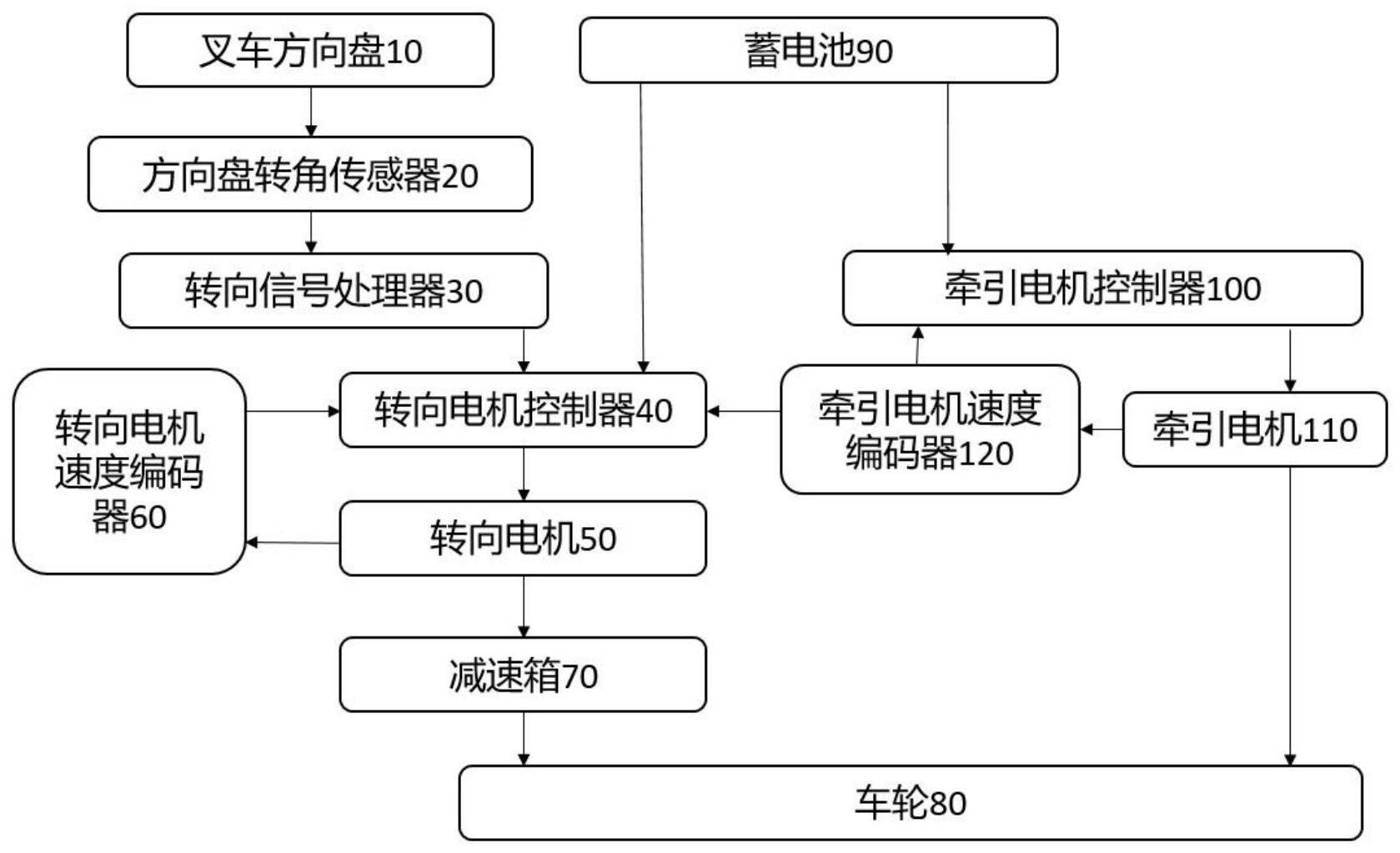
图1为本发明提出的与叉车行驶速度关联的转向调速控制系统的原理框图;
[0017]
图2为本发明提出的与叉车行驶速度关联的转向调速控制系统的逻辑判断图。
[0018]
图中:10-叉车方向盘、20-转角速度编码器、30-转向信号处理器、40-转向电机控制器、50-转向电机、60-转向电机速度编码器、70-减速箱、80-车轮、90-蓄电池、100-牵引电机控制器、110-牵引电机、120-牵引电机速度编码器。
具体实施方式
[0019]
下面结合具体实施例对本发明作进一步解说。
[0020]
参照图1,本发明提出的与叉车行驶速度关联的转向调速控制系统,包括叉车方向盘10、感应方向盘转动信号的方向盘转角传感器20、转向信号处理器30、转向电机控制器40、转向电机50、转向电机速度编码器60、减速箱70、车轮80、蓄电池90、牵引电机控制器100、牵引电机110和牵引电机速度编码器120,转向电机控制器40预先存储有牵引电机速度编码器120发出的叉车行驶速度信号所对应的转向电机50的减速率;牵引电机速度编码器120向转向电机控制器40和牵引控制器100实时反馈速度信号,转向电机控制器40依据接收到的叉车行驶速度信号,得出对应转向电机50的减速率以调节电机转速。
[0021]
其中:方向盘转角传感器20与叉车方向盘10的转动轴通过联轴器相连接,是用来检测方向盘的转动角度和转向方向;转向信号处理器30与方向盘转角传感器20连接,并用于将脉冲信号处理为控制电压信号;转向电机速度编码器60与转向电机控制器40、转向电机50形成一个闭环控制,转向电机速度编码器60用于将转向电机50的实时转速反馈给转向电机控制器40;牵引电机速度编码器120与牵引电机控制器100、牵引电机110形成一个闭环控制;牵引电机速度编码器120用于将牵引电机110的实时转速反馈给牵引电机控制器100;减速箱70用于在转向电机50和车轮80之间匹配转速,实现降低转速增加扭矩的目的;蓄电池90作为电源,给转向电机控制器40和牵引电机控制器100供电;牵引电机速度编码器120集成在牵引电机110上,用于检测叉车行驶速度数据,并实时反馈给牵引电机控制器100和转向电机控制器40;转向电机控制器40接收到转向信号处理器30提供的转向控制电压信号和牵引电机速度编码器120提供的速度脉冲信号,并通过如下公式计算出转向电机50的转速:
[0022][0023]
式中:n为转向电机转速,r/min;im为传动比;v为叉车行驶速度,m/s;w为转向修正系数,当行驶速度位于低速区0-a1区域时,w=1,当行驶速度位于高速区a1-a2区域是,w=4;f为摩擦系数;b为驱动轮半径,m。
[0024]
对于a1和a2的取值,是根据实际情况事先设置好的参数。通过上述公式的转向电机转速和行驶速度的对应关系,根据行驶速度调节转向电机的转速,当车速较高时,即驾驶员微动方向盘,转向电机以较低的转速运行,当车速较低时或静止原地转向状态下,即驾驶员快打方向盘,转向电机以较高的转速运行,通过调节转向电机的转速,既能满足叉车快打方向盘时快速转向,又能保证叉车高速行驶时轻打方向盘,即慢速转向及无转向状态下转向电机的低速运行,使叉车更加节能、降噪。
[0025]
工作原理:本发明首先通过行驶速度计算得到对应的转向电机转速值n,再根据所需的转向电机转速值n向转向电机发送速度调节的电压信号u,转向控制器接收到控制指令,通过can总线传输给转向电机功率变换器,通过转向电机功率变换器控制输入转向电机的电压u和频率使叉车随动转向;本发明根据叉车行驶速度调节转向电机的实际转速,其输入量是连续变化并且可以控制;其中转向电机内置一个速度编码器,可以用于检测转向电机实时转速,并将信号反馈给转向控制器,整个控制回路形成闭环。
[0026]
具体为:驾驶员转动方向盘,安装在叉车方向盘转轴内的转角传感器作同步旋转运动,采集方向盘的转角信号,包含转向角度和转向快慢。转向控制器利用方向盘转角传感器采集到的转角信号,进行处理运算,计算得到转向电机所需要的速度值n,转向电机接收到速度调节信号,进行动态响应转向。其中转向控制器在接收到转角信号的同时,还需要判断此时的叉车行驶速度;若行驶速度位于低速区0-a1区域时,w转向修正系数,w=1,当行驶速度位于高速区a1-a2区域时,w=4;削弱转向电机速度。关于判断逻辑图,如图2所示。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!