一种高灵敏度卫星导航信号捕获方法-j9九游会真人
1.本发明属于卫星导航信号捕获技术领域,尤其涉及一种高灵敏度卫星导航信号捕获方法。
背景技术:
2.目前,全球卫星导航系统gnss已在地面场景和低轨空间中取得广泛应用,随着航天技术的发展和对太空空间探索的进一步深入,各国研究机构和科研人员正努力将gnss的应用拓展到中高轨道乃至更高更远的地月轨道。相较于地面或低轨空间应用场景,gnss在中高轨道及地月轨道上的应用需要克服更多的技术难点。首先,接收机端的信号能量弱,普通接收机将无法完成信号的捕获跟踪,提高捕获性能需要更长的捕获数据;其次,由于飞行器飞行速度快以及卫星的高动态特性,相对运动将会产生较大的多普勒频移,信号多普勒效应更为明显。
3.因此为了提高捕获速度和捕获灵敏度,现有技术需要进一步优化捕获方案,一般采用的方法包括:(1)增大时域和频域的并行度以提高捕获速度;(2)延长相干积分时间以提高信号处理增益;(3)在信号二维搜索中加入多普勒补偿方法,以减小残留多普勒频偏对捕获结果的影响;(4)针对多路复合信号进行多路联合捕获以提高捕获灵敏度。但是,上述4种方法其效果仍需提高。
4.基于此,本领域技术人员亟需提出一种方法以解决上述现有技术中存在的问题。
技术实现要素:
5.有鉴于此,本发明的目的在于提供了一种联合fft系数补偿和分组码多普勒补偿的高灵敏度卫星导航捕获方法,可用于aceboc/altboc/scboc等信号调制方式的高灵敏度捕获,比如bds的b2a b2b联合捕获、galileo系统的e5a e5b联合捕获。
6.为了实现上述目的,本发明提供了如下技术方案:
7.一种高灵敏度卫星导航信号捕获方法,包括以下步骤:
8.基于fft系数补偿和分组码多普勒补偿搭建改进型捕获算法;
9.利用基于所述捕获算法构成的捕获引擎对卫星导航信号进行捕获,得到捕获结果。
10.优选的,利用基于所述捕获算法构成的捕获引擎对卫星导航信号进行捕获,得到捕获结果,具体包括以下步骤:
11.s1:预配置本地复现信号,利用所述本地复现信号对多路已下变频处理后的导航信号进行短时相关得到相干积分结果,并存入多个相干积分数组;
12.s2:根据多普勒偏移量对所述相干积分结果进行所述分组码多普勒补偿;
13.s3:对步骤s3的结果执行fft运算,完成所述fft系数补偿,得到fft运算结果;
14.s4:所述fft运算结果进行求模和最大值选取,确定所述峰值对应的载波多普勒和码相位并将信息输出。
15.优选的,预配置本地复现信号,具体包括:
16.根据卫星导航信号接收机捕获搜索的载波频率和码频率配置所述本地复现信号的载波nco和码nco,完成预配置所述本地复现信号。
17.优选的,利用所述本地复现信号对多路已下变频处理后的导航信号进行短时相关得到相干积分结果,并存入多个相干积分数组,具体包括:
18.对所述本地复现信号中的n个相关器支路进行短时相关累加,实现n个码相位的并行搜索,通过配置不同的短时相关段数实现相干积分时间的变化,并将积分结果存入数组,完成m段短时相关累加,形成m*n的相干积分数组。
19.所述步骤s2-s4的方法原理为:
[0020][0021]
其中,x(m,n)表示存放所述相干积分结果的m*n数组,m表示所述相干积分数组的行数,范围为0至m-1,n表示所述相干积分数组的列数,范围为0至n-1,m为短时相关的段数,δf表示所述卫星导航信号和本地生成信号之间的多普勒频差,t表示每一段的相干积分时间,t=m*t为总积分时间,γ表示所属卫星导航信号的中心频率f
rf
与扩频码频率fc之比,即γ=f
rf
/fc,表示对所述相干积分结果进行系数补偿后的离散傅里叶变换;式中表示进行所述码多普勒分组补偿后四舍五入并向下取整。
[0022]
其中,fft运算补偿系数为:
[0023][0024]
其中λ表示所述fft补偿系数,f
sc
表示所述信号的子载波频率。
[0025]
对于多路卫星导航信号,在联合所述fft系数补偿和所述分组码多普勒补偿的方案中,信号上边带的fft计算方式为:
[0026][0027]
信号下边带的fft计算方式为:
[0028][0029]
优选的,在执行所述fft计算时不必计算所有谱线,只需要计算部分的所述谱线,所述谱线的计算范围由所述码多普勒补偿决定。
[0030]
与现有技术相比,本发明具有如下有益效果:
[0031]
1、本发明提供的这种联合fft系数补偿和分组码多普勒补偿的捕获方法,其短时相关结合系数补偿的fft捕获算法部分可消除由多普勒效应造成的信号捕获结果谱线偏移的影响,实现多路复合调制信号联合捕获。
[0032]
2、本发明提供的这种联合fft系数补偿和分组码多普勒补偿的捕获方法,其码多普勒补偿算法部分克服了在较长的相干积分时间中多普勒频偏的影响,有效实现高灵敏度捕获。
[0033]
3、本发明提供的这种联合fft系数补偿和分组码多普勒补偿的捕获方法,其根据码多普勒计算fft谱线方法可有效缩短计算时间,减小计算量提高捕获效率。
[0034]
综上,本发明能够有效减小多普勒效应对于弱信号捕获的影响,实现弱信号的高灵敏度捕获。
附图说明
[0035]
图1为基于发明搭建的捕获算法的高灵敏度捕获方案流程图。
[0036]
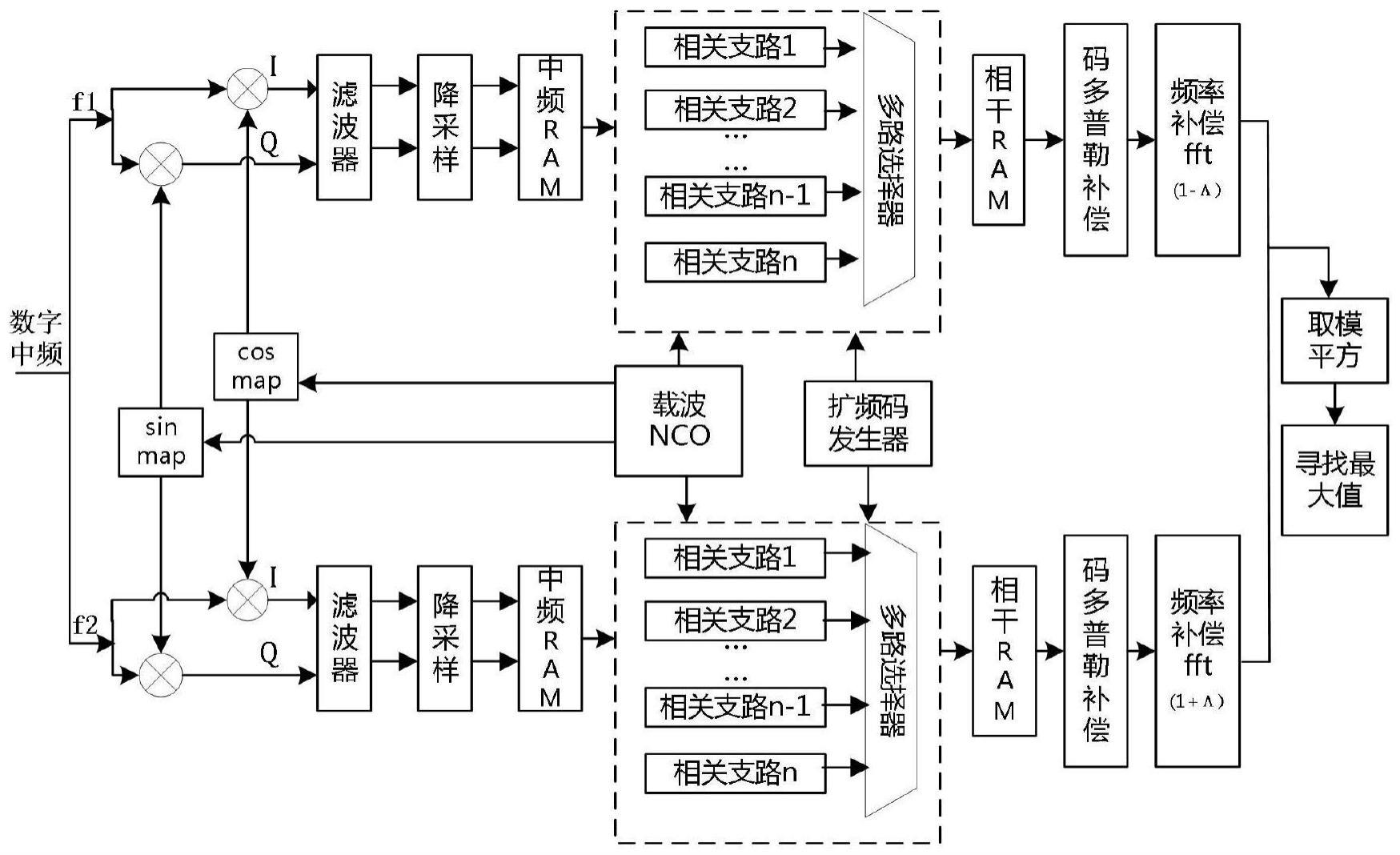
图2为本发明的一个实施例提供的捕获算法结构示意图。
[0037]
图3为本发明的一个实施例提供的一种由于多普勒频率偏移导致的搜索结果峰值码相位偏移和频率偏移的原理图。
[0038]
图4(a)-(c)为不利用本方案对卫星导航信号直接进行二维搜索捕获的结果示意图。
[0039]
图5为利用所述基于多普勒补偿的高灵敏度捕获方案对卫星导航信号进行捕获的结果示意图。
具体实施方式
[0040]
下面结合实施例对本发明提供的技术方案进行详细的说明,但是不能把它们理解为对本发明保护范围的限定。
[0041]
本发明提出一种联合fft系数补偿和分组码多普勒补偿的高灵敏度卫星导航信号捕获方案,该方案通过延长相干积分时间有效提高捕获灵敏度,通过系数补偿的fft运算消除boc信号上下边带的多普勒频偏影响,实现多路信号联合捕获,同时进行码多普勒补偿,有效减少峰值偏移的影响,提高信号的发现概率,并根据码多普勒选择fft谱线计算范围,提高捕获效率,实现弱信号的高灵敏度捕获。
[0042]
实施例1
[0043]
本实施例公开了一种高灵敏度卫星导航信号捕获方法,包括以下步骤:
[0044]
基于fft系数补偿和分组码多普勒补偿搭建改进型捕获算法;
[0045]
利用基于捕获算法构成的捕获引擎对卫星导航信号进行捕获,得到捕获结果。
[0046]
具体地:
[0047]
利用基于捕获算法构成的捕获引擎对卫星导航信号进行捕获,得到捕获结果,具体包括以下步骤:
[0048]
s1:预配置本地复现信号,利用本地复现信号对多路已下变频处理后的导航信号进行短时相关得到相干积分结果,并存入多个相干积分数组;
[0049]
s2:根据多普勒偏移量对相干积分结果进行分组码多普勒补偿;
[0050]
s3:对步骤s3的结果执行fft运算,完成fft系数补偿,得到fft运算结果;
[0051]
s4:fft运算结果进行求模和最大值选取,确定峰值对应的载波多普勒和码相位并将信息输出。
[0052]
其中,预配置本地复现信号,具体包括:
[0053]
根据卫星导航信号接收机捕获搜索的载波频率和码频率配置本地复现信号的载波nco和码nco,完成预配置本地复现信号。
[0054]
其中,利用本地复现信号对多路已下变频处理后的导航信号进行短时相关得到相干积分结果,并存入多个相干积分数组,具体包括:
[0055]
对本地复现信号中的n个相关器支路进行短时相关累加,实现n个码相位的并行搜索,通过配置不同的短时相关段数实现相干积分时间的变化,并将积分结果存入数组,完成m段短时相关累加,形成m*n的相干积分数组。
[0056]
以galileo e5信号为例,信号采用四路恒包络altboc调制方式,e5a和e5b信号的中心频率分别为1176.45mhz和1207.14mhz,包含有e5a-i、e5a-q、e5b-i、e5b-q四个信号分量,接收到的e5信号可表示为:
[0057][0058]
对于接收机接收到的内含多普勒频率的e5信号,多普勒频率包括码多普勒频率,子载波多普勒频率和载波多普勒频率,当相对速度为v时,码多普勒频率子载波多普勒载波多普勒
[0059]
代入到上述e5信号的表达式中可以得到:
[0060][0061]
若本地配置信号的载波多普勒频率为fd',对应子载波多普勒频率为fd'
sc
,码多普勒频率为fc',对下变频至f0的信号进行短时相关。
[0062]
使用上边带e5b-q信号进行短时相关可以得到:
[0063][0064]
使用下边带e5a-q信号进行短时相关可以得到:
[0065][0066]
另外,需要说明的是,由于在短时相关捕获算法中,对于存在较大频偏的信号,捕获峰值会随时间的增加而产生相应的偏移,因此在使用较长的捕获数据时,需要考虑到多普勒频偏的影响,并且需要加入码多普勒补偿方案消除影响。
[0067]
如果发送码与本地码一样快,即接收信号和本地信号同频,捕获结果的峰值将出现在第0个半码片相位上。当发送码比本地码快,即接收信号的频率比本地信号的频率要高时,则在相干积分之后,峰值将不会出现在第0个半码片相位上,而是向右出现偏移,比如一定时间后在第1个半码片上出现峰值,之后又会在第2个半码片上出现峰值。因此在码多普勒补偿算法中,根据码多普勒计算峰值的移动位置,对相干积分矩阵进行分组,按分组进行移位相加。
[0068]
频率偏移量δf与峰值的码片偏移量c之间的对应关系为:
[0069]
[0070]
其中,步骤s2-s4对步骤s1进行分组码多普勒补偿和fft计算的方法原理为:
[0071][0072]
其中,x(m,n)表示存放所述相干积分结果的m*n数组,m表示所述相干积分数组的行数,范围为0至m-1,n表示所述相干积分数组的列数,范围为0至n-1,m为短时相关的段数,δf表示所述卫星导航信号和本地生成信号之间的多普勒频差,t表示每一段的相干积分时间,t=m*t为总积分时间,γ表示所属卫星导航信号的中心频率f
rf
与扩频码频率fc之比,即γ=f
rf
/fc;上式表示对所述相干积分结果进行系数补偿后的离散傅里叶变换;式中表示进行所述码多普勒分组补偿后四舍五入取整。
[0073]
其中,fft运算补偿系数为:
[0074][0075]
其中λ表示fft补偿系数,f
sc
表示信号的子载波频率。
[0076]
对于多路卫星导航信号,在联合fft系数补偿和分组码多普勒补偿的方案中,信号上边带的fft计算方式为:
[0077][0078]
信号下边带的fft计算方式为:
[0079][0080]
在执行fft计算时不必计算所有谱线,只需要计算部分的谱线,谱线的计算范围由码多普勒补偿决定。
[0081]
fft计算的谱线l与频点f之间的对应关系为:
[0082][0083]
而码多普勒频偏δf与码片偏移量c之间的对应关系为:
[0084][0085]
因为半码片搜索精度为,频率范围与半码片偏移范围之间的对应关系如表1所示:
[0086]
表1频率范围与半码片偏移范围对应关系
[0087][0088][0089]
以altboc信号为例,信号的中心频率f
rf
与扩频码频率f
code
之比为γ=f
rf
/f
code
=116.5,故半码片搜索精度为,所以当频率偏移量为1100hz时,假设相干积分时间为1s,在t=mt=1s的时间内,峰值偏移量最大约为19个半码片,假设短时相关矩阵为m=3000行,短时相关时间为(1/3)ms,fft计算取4096点,谱线频率步进为3000/4096hz
[0090]
上述配置可以覆盖
±
1500hz的频率范围,在搜索时针对表1,进行频率分段搜索,半码片偏移为0时,在
±
29hz(58.25/2)的范围进行谱线计算,半码片偏移为1时,在29hz至87hz的范围进行谱线计算,以此类推,这样不需要计算所有的谱线,以减小计算量。
[0091]
对fft运算的结果进行求模和寻找最大值,确定峰值对应的载波多普勒和码相位并将信息输出。
[0092]
在执行fft计算时不必计算所有谱线,只需要计算部分的谱线,谱线的计算范围由码多普勒补偿决定。
[0093]
实施例2
[0094]
在实施例1的基础上,本实施例2进一步公开了一种基于实施例1搭建的捕获算法构成的捕获引擎;
[0095]
具体地:
[0096]
在本实施例中捕获方案是通过获取导航信号接收机的捕获积分结果,并根据多普勒偏移量对相干积分矩阵进行补偿,最后进行非相干积分得到信号的二维捕获结果。
[0097]
其中,捕获引擎包括:数字中频信号下变频处理、本地信号生成、相干积分模块、分组码多普勒补偿模块、系数补偿的fft、非相干累加模块、寻找峰值模块。具体来说,捕获算法结构的工作过程包括:
[0098]
步骤1:首先按照卫星导航信号接收机捕获搜索的载波频率和码频率配置本地信号的载波nco和码nco,按照卫星导航信号接收机捕获搜索的卫星号配置码产生器的卫星二级码,启动图2所示捕获引擎。
[0099]
步骤2:通过短时相关算法得到相干积分矩阵。相干积分时间和段数由捕获信号信息确定,多次分段进行二维搜索。本实例中信号的主码长度为10230个码片,相干积分时间可以选择1s,段数为3000段,采用更长的相干积分时间可以有效提高捕获灵敏度,但也意味
着更长的捕获时间。
[0100]
步骤3:利用分组码多普勒补偿模块对完成相干积分之后的i路和q路数据进行处理,即可得到进行码多普勒补偿处理后的数组。
[0101]
图3(a)表示本实施例提供的由于多普勒频率偏移导致的搜索结果峰值码相位偏移的原理图。具体来说,本实验中本地码搜索码片间隔为0.5个码相位,对于短时相关算法,若短时相关时间设为(1/3)ms,此时理论频率搜索范围覆盖
±
1500hz。
[0102]
由于频率偏移量δf与峰值的码片偏移量c之间的对应关系为:
[0103][0104]
所以当捕获所用galileo e5信号数据长度为1秒的数据,多普勒频率偏移为1100hz时,码片偏移量为:
[0105]
1100/116.5*1=9.44
[0106]
即针对1100hz的频偏时,1秒的时间会偏差约9.44*2≈19个半码片。因此使用较长的捕获数据需要考虑码多普勒补偿。
[0107]
如果发送码与本地码的码频率一致,且接收的一开始就对其进行捕获,则应该一直在第0个半码片相位上捕获到,假设发送码快、本地码慢,即当接收频率比本地频率高时,在一定时间后,峰值将会出现偏移,出现在第1个半码片上,之后又会在第2个半码片上出现。
[0108]
根据上述对应关系计算补偿分组,将3000行相干积分矩阵进行分段,然后按列移位,分别进行分组左移和分组右移,完成码多普勒补偿。
[0109]
步骤4:利用捕获引擎进行频率补偿的fft运算,图3(b)表示本实施例提供的由于多普勒频率偏移导致的搜索结果峰值频率偏移的原理图。
[0110]
具体来说,galileo信号采用四路恒包络altboc调制方式,e5a和e5b信号的中心频率分别为1176.45mhz和1207.14mhz,当存在多普勒偏移量时,调制功率谱中包含子载波多普勒,信号主瓣出现偏移,无法实现联合捕获。对于接收机接收到的内含多普勒频率的e5信号,多普勒频率包括码多普勒频率,子载波多普勒频率和载波多普勒频率,当相对速度为v时,码多普勒频率子载波多普勒载波多普勒若本地配置信号的载波多普勒频率为fd',对应子载波多普勒频率为fd'
sc
,码多普勒频率为fc',对下变频至f0的信号进行短时相关。
[0111]
以e5a-q信号为例,当接收信号和本地配置信号的多普勒偏移量分别为δf和δf1时,信号的载波频率为码频率为
[0112][0113]
根据信号变换原理,信号的载波复数域表示为生成信号的载波复数域表示为子载波复数域表示为则信号表示为
e5b-q信号同理,复数域表示为
[0114]
下表为e5a-q和e5b-q信号和本地复现信号的复数域表示及频差。
[0115][0116][0117]
图3(b)中峰值之间的频差量即为由多普勒偏移量造成的捕获峰值频移,频率偏移量δf与峰值的码片偏移量c之间的对应关系为:
[0118][0119]
对信号进行分组码多普勒补偿和fft计算的原理为:
[0120][0121]
fft运算的补偿系数为:
[0122][0123]
在本发明的实施例中,对于galileo e5信号,
[0124]
当加入频率补偿的fft运算后,联合分组码多普勒补偿和系数补偿后的fft运算方案原理为:
[0125][0126]
其中上边带信号e5b-q的fft计算方式为:
[0127][0128]
下边带信号e5a-q的fft计算方式为:
[0129][0130]
步骤5:利用fft运算将相干积分矩阵变换到频域后求模,即可得到进行补偿处理后的捕获结果;
[0131]
步骤6:将捕获结果进行比较并输出,此处选择最大值作为捕获结果输出;对捕获结果进行判决,将捕获结果峰值与门限值进行比较,若超过门限,则对应的频率和码相位即为最终捕获结果,完成捕获,如果未超过门限值,则返回步骤1继续进行搜索。
[0132]
在本技术的一个具体实施例中,通过仿真产生导航信号数据,对捕获方案进行了实验验证。本实验中,数据采样率为151mhz,扩频码速率为10.23mhz,对于短时相关算法,若短时相关时间设为(1/3)ms,即1ms分3段,相干积分时间为1s,搜索间隔0.5个码片,最后执行4096点fft运算和1次非相干积分次数,对捕获结果进行对比分析。卫星导航信号的真实多普勒频率为1100hz,整个e5信号的载噪比为22dbhz,测试结果如图4和图5所示。其中图4为不使用本方案对卫星导航信号直接进行二维搜索捕获的结果示意图,图5为利用基于多普勒补偿的高灵敏度捕获方案对卫星导航信号进行捕获的结果示意图。图4中可以看到当信号较弱时,经过1s相干积分,1次非相干积分之后,如果不经过多普勒补偿几乎看不到明显的峰值信息,由于多普勒频偏,峰值分散到不同的码相位,并不能捕获到在一个码相位上的峰值。图5中经过补偿后可以明显看到信号的峰值,载波多普勒为对应着第3551根谱线,根据计算公式可得,频偏为δf=(3551-2048)
·
3000/4096=1100hz,符合预设多普勒偏差量。与图4所示的结果比较,峰值得到有效累加。
[0133]
在本技术的实施例中,由于半码片搜索精度为当频率偏移量δf=1100hz时,码片偏移量为1100/116.5*1=9.44,即1秒的时间会偏差约9.44*2≈19个半码片,由于频率范围与半码片偏移范围之间的对应关系如表x所示,搜索时针对表x进行频率分段搜索,半码片偏移为0时,在
±
29hz(58.25/2)的范围进行谱线计算,半码片偏移为1时,在29hz至87hz的范围进行谱线计算,以此类推。
[0134]
综上,本技术实施例提供了一种联合fft系数补偿和分组码多普勒补偿的高灵敏度卫星导航信号捕获方案。该方案包括以下步骤:生成本地中频载波、配置本地复现信号,利用本地复现信号对经下变频后的导航信号进行短时相关,得到相干积分结果并存入数组,然后对相干积分结果进行分组码多普勒补偿和系数补偿fft运算,对fft运算的结果进行求模和选取最大值,确定峰值对应的载波多普勒和码相位并将信息输出。通过系数补偿的fft运算和码多普勒补偿算法部分有效减小在较长的捕获时间中多普勒频偏的影响,并根据码多普勒计算fft谱线有效缩短计算时间,提高捕获效率,实现弱信号的高灵敏度捕获。
[0135]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应
视为本发明的保护范围。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!