一种去虾头装置的制作方法-j9九游会真人
1.本发明涉及水产加工设备领域,尤其涉及一种去虾头装置。
背景技术:
2.虾是一种人们餐桌上常见的食物,既可以对活虾直接进行烹饪保持虾的鲜味,也可以通过设备处理后冷藏以便进行快速出餐。虾头的可食用部分较少,作为肥料的原料反而可以获得更高的经济价值,因此在冷藏虾的生产过程中通常采用人工去头的方式将虾头去除回收。
3.现有的去虾头方式有人工作业和机械作业两种方式,其中,人工作业去虾头的过程中,工作人员带着手套难以抓起较滑的虾体,而不带手套又容易被虾枪刺伤,甚至即使带着手套,较为尖锐的虾枪容易戳破工作人员的手套,对工作人员造成伤害。而机械作业需要事先做好虾头位置校准,通过人工将虾头摆放至特定方向进行放置,浪费较多的人力和时间。
技术实现要素:
4.基于此,本发明提供一种能够替代人工作业的去虾头装置。
5.本发明的技术方案为:一种去虾头装置,包括依次设置的上料模块、分料模块、去虾头模块以及控制模块,所述控制模块与所述上料模块、分料模块和去虾头模块控制连接。所述上料模块包括第一储料仓和选料组件,所述选料组件包括第一轨道和第一振动盘,所述第一轨道一端延伸至所述第一储料仓、另一端延伸至所述第一振动盘。所述分料模块包括第二轨道、第一检测单元和换向机构,所述第一振动盘开设有第一出料口,所述第一出料口与所述第二轨道的输入端对应,所述换向机构安装于所述第二轨道并用于变换虾的头尾方向,所述第一检测单元用于检测所述第二轨道上输送的虾的头尾方向。所述去虾头模块对应设于所述第二轨道的下料端。
6.可选的,所述选料组件包括至少两个沿第一方向依次布置的第一振动盘,所述选料组件还包括分料轨道和分料机构,所述分料轨道沿所述第一方向延伸,所述分料机构安装于所述分料轨道并能够沿所述第一方向移动至任一所述第一振动盘上方。
7.可选的,所述分料机构包括分料支架以及安装于所述分料支架的分料仓、分料挡板和分料驱动单元,所述分料支架与所述分料轨道连接以使所述分料仓与所述第一轨道或所述第一振动盘对应,所述分料仓设有分料入口和分料出口,所述分料挡板活动安装于所述分料支架,所述分料驱动单元能够驱动所述分料挡板移动并遮挡或露出所述分料出口。
8.可选的,所述分料挡板转动安装于所述分料支架,所述分料驱动单元能够驱动所述分料挡板转动以遮挡或露出所述分料出口。
9.可选的,所述选料组件的数量为多组,多组所述选料组件从上至下依次分布。
10.可选的,所述换向机构包括第一电机和第一夹具,所述第一夹具对应设于所述第二轨道并用于夹持第二轨道上输送的虾,且所述第一夹具安装于所述第一电机以沿水平方
向转动。
11.可选的,所述第二轨道设有换向平台,所述换向平台包括换向支撑板和换向挡板,所述第二轨道的两侧分别设有所述换向支撑板,所述换向支撑板的外缘连接有所述换向挡板,其中,所述第一夹具设于所述换向平台上方,所述换向挡板沿所述第一夹具的转动轨迹延伸布置。
12.可选的,所述分料模块还包括第一挡板和以及驱动所述第一挡板移动的第一挡料驱动单元,所述第一挡板设于所述换向机构的出料方向。
13.可选的,所述去虾头模块包括进料管道、旋转分离机构和虾身夹取机构,所述旋转分离机构能够沿所述进料管道的周向及径向移动以分离处于进料管道内的虾头和虾身,所述虾身夹取机构设于所述进料管道下方并用于夹持固定虾身。
14.可选的,所述旋转分离机构包括旋转套、旋转驱动单元和分离组件,所述旋转套套设于所述进料管道外周,所述进料管道的周壁开设有贯穿其内外两侧并沿其周向延伸的通孔,所述分离组件安装于所述旋转套并能够沿所述旋转套的径向从所述通孔插入所述进料管道内,所述旋转驱动单元能够驱动所述旋转套相对所述进料管道转动,以带动所述分离组件分离虾头和虾身。
15.可选的,所述旋转套的外周壁开设有沿其径向延伸的活动槽,所述分离组件活动设于所述活动槽,所述旋转套开设有导向槽,所述导向槽绕所述进料管道的外周延伸并逐渐靠近所述进料管道,所述分离组件设有导向杆,所述导向杆限位于所述导向槽内,所述旋转驱动单元驱动所述旋转套带动所述分离组件转动时,所述导向杆沿所述导向槽移动,并使所述分离组件沿所述进料管道的径向移动。
16.可选的,所述分离组件包括插针和活动块,所述活动块活动安装于所述旋转套,所述插针固定于所述活动块并用于刺入虾头旋转分离。
17.可选的,所述分离组件的数量有两组,两组所述分离组件对称布置于所述进料管道的径向两端。
18.可选的,所述旋转分离机构与所述进料管道的相对转动最大角度为a,180
°
≥a≥90
°
。
19.可选的,所述虾身夹取机构包括虾身夹具、第一导轨、第二导轨、第一滑块、第二滑块、夹具传动组件和夹具驱动单元,所述第一导轨的延伸方向与所述进料管道的轴向平行且垂直所述第二导轨的延伸方向,所述虾身夹具固定于所述第一导轨,所述第一滑块滑动安装于所述第一导轨,所述第二滑块滑动安装于所述第二导轨,所述第一滑块与所述第二滑块固定连接,所述夹具驱动单元通过所述夹具传动组件与所述第一导轨连接。
20.可选的,所述夹具传动组件包括曲轴和导向支架,所述曲轴与所述夹具驱动单元的输出轴固定连接,且所述曲轴开设有沿所述夹具驱动单元的输出轴径向延伸的第一滑槽,所述导向支架开设有第二滑槽,所述第二滑槽包括第一导向部和第二导向部,所述第一导向部的延伸方向与所述第二导轨的延伸方向平行,所述第二导向部的延伸方向与所述第一导轨的延伸方向平行,所述第一导轨连接有导向轴,所述导向轴穿设限位于所述第一滑槽和所述第二滑槽。
21.可选的,所述虾身夹取机构还包括落料挡板,所述落料挡板的一端与进料管道的输入端连接,另一端与所述第二轨道贴合。
22.可选的,所述虾身夹取机构还包括虾身检测单元,用于检测所述进料管道内是否有虾从进料管道的下方伸出虾身。
23.可选的,所述去虾头模块还包括收料机构,所述收料机构包括收料轨道、分隔板和分料管道,所述分隔板沿所述收料轨道的延伸方向设置,使得所述收料轨道分为第一轨道部和第二轨道部,所述分料管道的输入端和所述进料管道的输出端沿水平方向错位设置,所述进料管道设于所述第一轨道部的上方,所述虾身夹具在所述分料管道输入端的上方和所述进料管道的输出端的下方之间移动。
24.可选的,所述去虾头模块还包括第二推料机构,所述第二推料机构包括第二推料板和第二推料驱动单元,所述第二推料板设于所述第二轨道并能够通过第二推料驱动单元将第二轨道上的虾推向所述去虾头模块。
25.可选的,沿所述第二轨道的延伸方向依次设有多个第二挡料组件,所述第二挡料组件包括第二挡板和第二挡料驱动单元,所述第二挡板连接于所述第二挡料驱动单元并用于阻挡所述第二轨道上输送的虾,相邻两个所述第二挡料组件之间设有所述第二推料机构。
26.可选的,还包括回收模块,所述回收模块包括回收轨道、回收推料组件和推料电机,所述推料电机与所述控制模块电连接,所述推料电机驱动所述回收推料组件在所述回收轨道和所述第二轨道之间移动。
27.实施本发明实施例,与现有技术相比,具有如下有益效果:
28.本发明的去虾头装置,使用时,第一轨道将第一储料仓内的虾运输至第一振动盘,在第一振动盘的作用下,去除虾上附带的水分、沙子等杂质,虾从第一出料口进入第二轨道运输,第一检测单元对第二轨道内虾的运输方向与预设方向进行对比,方向不一致时,则停止第二轨道并通过换向机构将虾方向调整至预设方向,再由第二轨道运输至去虾头模块去除虾头,从上料到方向确定再到去虾头均不需要人工作业,实现了去虾头的自动化。
附图说明
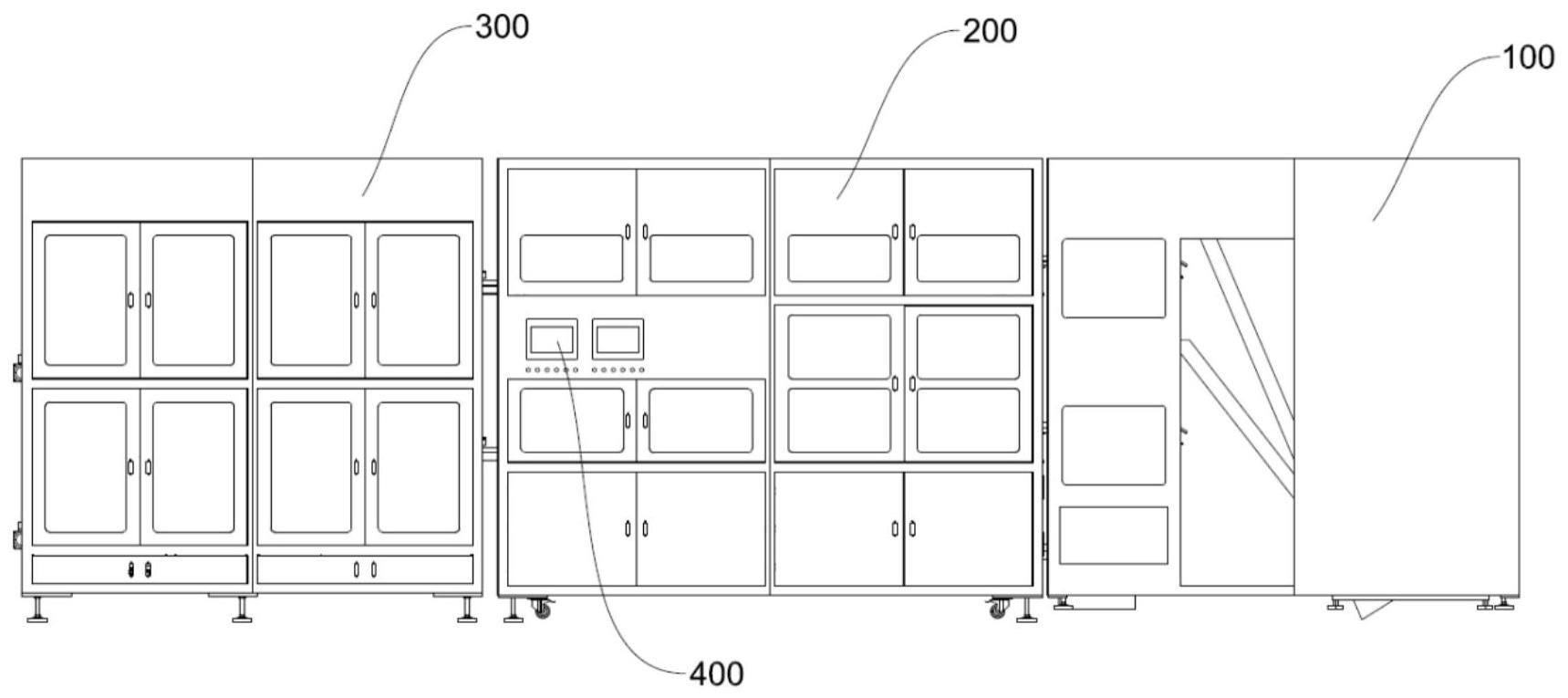
29.图1是本发明实施例所述的去虾头装置的结构示意图。
30.图2是本发明实施例所述的去虾头装置的拆除外壳的结构示意图。
31.图3是本发明实施例所述的去虾头装置的上料模块的结构示意图。
32.图4是本发明实施例所述的去虾头装置的选料组件的结构示意图。
33.图5是本发明实施例所述的去虾头装置的分料模块和回收模块的结构示意图。
34.图6是本发明实施例所述的去虾头装置的分料模块的结构示意图。
35.图7是本发明实施例所述的去虾头装置的换向机构的结构示意图。
36.图8是本发明实施例所述的去虾头装置的去虾头模块的结构示意图。
37.图9是本发明实施例所述的去虾头装置的旋转分离机构和虾身夹取机构的结构示意图。
38.图10是本发明实施例所述的去虾头装置的旋转分离机构和进料管道的剖视图。
39.图11是本发明实施例所述的去虾头装置的第二挡料组件的结构示意图。
40.附图标记说明:
41.100、上料模块,
42.11、第一储料仓,
43.12、选料组件,121、第一轨道,122、第一振动盘,122a、第一出料口,123、分料轨道,124、分料机构,124a、分料支架,124b、分料仓,
44.200、分料模块,
45.21、第二轨道,211、换向支撑板,212、换向挡板,
46.22、换向机构,221、第一电机,222、第一夹具,
47.23、第一挡板,
48.24、第一挡料驱动单元,
49.300、去虾头模块,
50.31、进料管道,311、通孔,
51.32、旋转分离机构,321、旋转套,321a、活动槽,321b、导向槽,322、旋转驱动单元,323、分离组件,323a、导向杆,323b、插针,323c、活动块,
52.33、虾身夹取机构,331、虾身夹具,332、第一导轨,333、第二导轨,334、第一滑块,335、第二滑块,336、夹具传动组件,337、夹具驱动单元,338、导向轴,339、落料挡板,
53.34、曲轴,341、第一滑槽,
54.35、导向支架,351、第一导向部,352、第二导向部,
55.36、收料机构,361、收料轨道,361a、第一轨道部,361b、第二轨道部,362、分隔板,363、分料管道,
56.37、第二推料机构,371、第二推料板,372、第二推料驱动单元,
57.38、第二挡料组件,381、第二挡板,382、第二挡料驱动单元,
58.400、控制模块,
59.500、回收模块,51、回收轨道,52、回收推料组件,53、推料电机,x、第一方向。
具体实施方式
60.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
61.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
62.此外,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
63.参照图1至图8,本实施例提供一种去虾头装置,包括依次设置的上料模块100、分料模块200、去虾头模块300以及控制模块400,控制模块400与上料模块100、分料模块200和
去虾头模块300控制连接。上料模块100包括第一储料仓11和选料组件12,选料组件12包括第一轨道121和第一振动盘122,第一轨道121一端延伸至第一储料仓11、另一端延伸至第一振动盘122。分料模块200包括第二轨道21、第一检测单元和换向机构22,第一振动盘122开设有第一出料口122a,第一出料口122a与第二轨道21的输入端对应,换向机构22安装于第二轨道21并用于变换虾的头尾方向,第一检测单元用于检测第二轨道21上输送的虾的头尾方向。去虾头模块300对应设于第二轨道21的下料端。使用时,第一轨道121将第一储料仓11内的虾运输至第一振动盘122,在第一振动盘122的作用下,去除虾上附带的水分、沙子等杂质,虾从第一出料口122a进入第二轨道21运输,第一检测单元对第二轨道21内虾的运输方向与预设方向进行对比,方向不一致时,则停止第二轨道21并通过换向机构22将虾方向调整至预设方向,再由第二轨道21运输至去虾头模块300去除虾头,从上料到方向确定再到去虾头均不需要人工作业,实现了去虾头的自动化。
64.较佳的,参照图4,在本实施例中,选料组件12包括至少两个沿第一方向x依次布置的第一振动盘122,选料组件12还包括分料轨道123和分料机构124,分料轨道123沿第一方向x延伸,分料机构124安装于分料轨道123并能够沿第一方向x移动至任一第一振动盘122上方。通过分料轨道123驱动分料机构124对第一轨道121运输的虾进行分料,分入多个第一振动盘122内,多个第一振动盘122同时进行筛料、除水、脱沙,提高整体的工作效率。
65.较佳的,参照图4,在本实施例中,分料机构124包括分料支架124a以及安装于分料支架124a的分料仓124b、分料挡板和分料驱动单元,分料支架124a与分料轨道123连接以使分料仓124b与第一轨道121或第一振动盘122对应,分料仓124b设有分料入口和分料出口,分料挡板活动安装于分料支架124a,分料驱动单元能够驱动分料挡板移动并遮挡或露出分料出口。分料挡板转动安装于分料支架124a,分料驱动单元能够驱动分料挡板转动以遮挡或露出分料出口。使用时,分料挡板遮挡分料出口,分料轨道123驱动分料仓124b到第一轨道121下方,第一轨道121的虾在第一轨道121的作用下落入分料仓124b内,第一轨道121驱动分料仓124b移动至一个第一振动盘122的上方,分料挡板开启,分料仓124b内下从分料出口落入第一振动盘122内并通过第一振动盘122完成分料。
66.较佳的,参照图3,在本实施例中,选料组件12的数量为多组,多组选料组件12从上至下依次分布。具体的,在本实施例中,多组选料组件12还可以采用差时运行的方式作业,使得在任意时刻都有虾进入第二轨道21进行后续作业,避免在第一振动盘122的作业过程中造成空窗期。
67.较佳的,参照图5至图7,在本实施例中,换向机构22包括第一电机221和第一夹具222,第一夹具222对应设于第二轨道21并用于夹持第二轨道21上输送的虾,且第一夹具222安装于第一电机221以沿水平方向转动。第一检测单元对第二轨道21内虾的方向与预设方向进行对比,方向不一致时,则通过第一夹具222将虾夹起转动,使得该虾的方向调整至预设方向。
68.较佳的,参照图7,在本实施例中,第二轨道21设有换向平台,换向平台包括换向支撑板211和换向挡板212,第二轨道21的两侧分别设有换向支撑板211,换向支撑板211的外缘连接有换向挡板212,其中,第一夹具222设于换向平台上方,换向挡板212沿第一夹具222的转动轨迹延伸布置。当第二轨道21内的虾过小时,在第一夹具222夹取虾的过程中容易飞出至换向平台,此时虾的朝向依然与预设方向相反,第一夹具222沿换向挡板212转动的过
程中,第一夹具222推动虾,使得虾在换向挡板212和第一夹具222的作用下换向并被推回至第二轨道21。
69.较佳的,参照图5,在本实施例中,分料模块200还包括第一挡板23和以及驱动第一挡板23移动的第一挡料驱动单元24,第一挡板23设于换向机构22的出料方向。具体的,在本实施例中,第一挡板23还装设有第一开关,所述第一开关与所述控制模块400电连接。虾从第二轨道21运动至换向机构22时,与第一开关接触,控制模块400受到第一开关的电信号开启第一检测单元对虾的方向进行判断,若方向与预设方向相同,则启动第一挡料驱动单元24驱动第一挡板23升起,虾继续沿第二轨道21前行;若方向与预设方向相反,则停止第二轨道21,驱动换向单元使虾换向。
70.较佳的,参照图8至图10,在本实施例中,去虾头模块300包括进料管道31、旋转分离机构32和虾身夹取机构33,旋转分离机构32能够沿进料管道31的周向及径向移动以分离处于进料管道31内的虾头和虾身,虾身夹取机构33设于进料管道31下方并用于夹持固定虾身。具体的,在本实施例中,旋转分离机构32包括旋转套321、旋转驱动单元322和分离组件323,旋转套321套设于进料管道31外周,进料管道31的周壁开设有贯穿其内外两侧并沿其周向延伸的通孔311,分离组件323安装于旋转套321并能够沿旋转套321的径向从通孔311插入进料管道31内,旋转驱动单元322能够驱动旋转套321相对进料管道31转动,以带动分离组件323分离虾头和虾身。虾从第二轨道21的出料端进入进料管道31,虾身夹取机构33夹持虾身,分离组件323夹取虾头,虾头和虾身的连接关节为虾的脆弱位置,通过旋转驱动单元322驱动旋转套321扭动虾头,该方式可以使虾头和虾尾在关节处断开,与常规的刀切的方式相比,可以更好地保证虾黄和虾肉的完整。
71.较佳的,参照图10,在本实施例中,旋转套321的外周壁开设有沿其径向延伸的活动槽321a,分离组件323活动设于活动槽321a,旋转套321开设有导向槽321b,导向槽321b绕进料管道31的外周延伸并逐渐靠近进料管道31,分离组件323设有导向杆323a,导向杆323a限位于导向槽321b内,旋转驱动单元322驱动旋转套321带动分离组件323转动时,导向杆323a沿导向槽321b移动,并使分离组件323沿进料管道31的径向移动。具体的,在本实施例中,分离组件323包括插针323b和活动块323c,活动块323c活动安装于旋转套321,插针323b固定于活动块323c并用于刺入虾头旋转分离。通过插针323b插入虾头的方式避免夹取虾头的过程中出现打滑的现象。此外,在旋转套321转动的过程中,导向杆323a沿导向槽321b滑动,增加插针323b插入虾头的深度,增加夹取虾头的牢固度,避免在虾头扭动旋转的过程中出现打滑的现象。
72.较佳的,参照图9和图10,在本实施例中,分离组件323的数量有两组,两组分离组件323对称布置于进料管道31的径向两端。通过相对设置的两组分离组件323可以充分夹紧虾头。
73.较佳的,在本实施例中,旋转分离机构32与进料管道31的相对转动最大角度为a,180
°
≥a≥90
°
。具体的,在本实施例中,旋转分离机构32与进料管道31的相对转动最大角度为150
°
,相对设置两组分离组件323各转动150
°
,既能够充分扭动虾头使得虾身与虾头分离,也能够避免出现虾头自身断裂的情况。
74.较佳的,参照图9和图10,在本实施例中,虾身夹取机构33包括虾身夹具331、第一导轨332、第二导轨333、第一滑块334、第二滑块335、夹具传动组件336和夹具驱动单元337,
第一导轨332的延伸方向与进料管道31的轴向平行且垂直第二导轨333的延伸方向,虾身夹具331固定于第一导轨332,第一滑块334滑动安装于第一导轨332,第二滑块335滑动安装于第二导轨333,第一滑块334与第二滑块335固定连接,夹具驱动单元337通过夹具传动组件336与第一导轨332连接。虾身夹具331沿第二导轨333滑动,使得虾身夹具331在完成去虾头作业后能够将虾身移至与虾头不在同一竖直面的位置,虾头和虾身在重力的作用下自然下落,使得虾身和虾头落入不同位置,实现对虾身虾头的分料回收。此外,在虾身夹具331沿第一导轨332移动的过程中,可以确保被虾身夹具331夹取的虾身和被分离组件323夹取的虾头形成分离。
75.较佳的,参照图9,在本实施例中,夹具传动组件336包括曲轴34和导向支架35,曲轴34与夹具驱动单元337的输出轴固定连接,且曲轴34开设有沿夹具驱动单元337的输出轴径向延伸的第一滑槽341,导向支架35开设有第二滑槽,第二滑槽包括第一导向部351和第二导向部352,第一导向部351的延伸方向与第二导轨333的延伸方向平行,第二导向部352的延伸方向与第一导轨332的延伸方向平行,第一导轨332连接有导向轴338,导向轴338穿设限位于第一滑槽341和第二滑槽。通过曲轴34和导向支架35对虾身夹具331的移动形成限位,从而可以通过一个夹具驱动单元337即可完成虾身夹具331的移动。
76.较佳的,参照图9和图10,在本实施例中,虾身夹取机构33还包括落料挡板339,落料挡板339的一端与进料管道31的输入端连接,另一端与第二轨道21贴合。通过落料挡板339对从第二导轨333想进料管道31移动的虾形成缓冲,避免虾进入进料管道31时速度过快飞出进料管道31。
77.较佳的,在本实施例中,虾身夹取机构33还包括虾身检测单元,用于检测进料管道31内是否有虾从进料管道31的下方伸出虾身。使得虾身夹具331可以准确夹住虾身。
78.较佳的,参照图8,在本实施例中,去虾头模块300还包括收料机构36,收料机构36包括收料轨道361、分隔板362和分料管道363,分隔板362沿收料轨道361的延伸方向设置,使得收料轨道361分为第一轨道部361a和第二轨道部361b,分料管道363的输入端和进料管道31的输出端沿水平方向错位设置,进料管道31设于第一轨道部361a的上方,虾身夹具331在分料管道363输入端的上方和进料管道31的输出端的下方之间移动。在虾身和虾头分离后,虾头在重力的作用下落入第一轨道部361a,虾身经过虾身夹具331移至分料管道363后,在分料管道363的引导下落入第二轨道部361b,实现了虾身和虾头的分别回收,以便后续对虾头和虾身的进一步加工包装。
79.较佳的,参照图8,在本实施例中,去虾头模块300还包括第二推料机构37,第二推料机构37包括第二推料板371和第二推料驱动单元372,第二推料板371设于第二轨道21并能够通过第二推料驱动单元372将第二轨道21上的虾推向去虾头模块300。通过第二推料机构37可以将虾从第二轨道21推至落料挡板339并沿落料挡板339落入进料管道31中。
80.较佳的,参照图8和图11,在本实施例中,沿第二轨道21的延伸方向依次设有多个第二挡料组件38,第二挡料组件38包括第二挡板381和第二挡料驱动单元382,第二挡板381连接于第二挡料驱动单元382并用于阻挡第二轨道21上输送的虾,相邻两个第二挡料组件38之间设有第二推料机构37。具体的,在本实施例中,第二挡板381的数量为七个,从离第一轨道121最远的第二挡板381依次编号为一号至七号,一号落下,第一只虾接触或靠近一号时,二号落下,第一只虾落入一号和二号之间的间隔,以此类推,七个第二挡板381形成六个
间隔,将六只虾一一分隔,再通过第二推料机构37推至分料管道363形成对虾的一一作业。
81.较佳的,参照图5,在本实施例中,该去虾头装置还包括回收模块500,回收模块500包括回收轨道51、回收推料组件52和推料电机53,推料电机53与控制模块400电连接,推料电机53驱动回收推料组件52在回收轨道51和第二轨道21之间移动。第一检测单元对位于第二轨道21的虾进行分析,如果判定为劣质虾,则通过在该虾沿第二轨道21移动至回收推料组件52时,通过回收推料组件52将将该劣质虾推至回收轨道51,通过回收轨道51完成回收。
82.本实施例所提供的一种去虾头装置,使用时,第一轨道121将第一储料仓11内的虾运输至分料仓124b,分料轨道123带动分料仓124b移动至第一振动盘122的上方,开启分料挡板将分料仓124b内的虾落入第一振动盘122,经过第一振动盘122的振动的虾进入第二轨道21运输,沿第二轨道21运输至第一挡板23时,第二轨道21停止动作,由第一检测单元对第二轨道21内虾的方向与预设方向进行对比,对比结果一致时,第一挡料驱动单元24驱动第一挡板23升起,第二轨道21继续动作,对比结果不一致时,第一夹具222将虾夹起转动,使得该虾的方向调整至预设方向。第一检测单元判定虾为劣质虾时,通过回收推料组件52将将该劣质虾推至回收轨道51,通过回收轨道51完成回收。沿第二轨道21移动至第二挡板381后,通过第二推料机构37将该虾推至进料管道31,通过虾身夹具331夹取虾身、分离组件323夹取虾头,旋转分离机构32转动使得虾头扭动后与虾身分离,虾身夹具331沿第二导轨333和第一导轨332滑动,使得虾身沿分料管道363落入第二轨道部361b,虾头在重力的作用下落入第一轨道部361a。
83.本实施例的去虾头装置,具有以下有益效果:
84.一、使用时,第一轨道121将第一储料仓11内的虾运输至第一振动盘122,在第一振动盘122的作用下,去除虾上附带的水分、沙子等杂质,虾从第一出料口122a进入第二轨道21运输,第一检测单元对第二轨道21内虾的运输方向与预设方向进行对比,方向不一致时,则停止第二轨道21并通过换向机构22将虾方向调整至预设方向,再由第二轨道21运输至去虾头模块300去除虾头,从上料到方向确定再到去虾头均不需要人工作业,实现了去虾头的自动化。
85.二、虾从第二轨道21的出料端进入进料管道31,虾身夹取机构33夹持虾身,分离组件323夹取虾头,虾头和虾身的连接关节为虾的脆弱位置,通过旋转驱动单元322驱动旋转套321扭动虾头,该方式可以使虾头和虾尾在关节处断开,与常规的刀切的方式相比,可以更好地保证虾黄和虾肉的完整。
86.三、虾身夹具331沿第一导轨332和第二导轨333滑动,使得虾身夹具331在完成去虾头作业后能够将虾身移至与虾头不在同一竖直面的位置,虾头和虾身在重力的作用下自然下落,使得虾身和虾头落入不同位置,实现对虾身虾头的分料回收。
87.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和变形,这些改进和变形也视为本发明的保护范围。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!