一种基于果园种植的机械化生产方法与流程-j9九游会真人
1.本发明涉及果园技术领域,尤其涉及一种基于果园种植的机械化生产方法。
背景技术:
2.果园,是指种植果树的园地,也叫果木园,建园前须对当地的气候、土壤、自然灾害、地形进行调查。避免在山麓、山谷洼地容易积存冷空气而造成霜冻的地区以及风口、常年积涝之地建园。地址选定后根据果树区域化要求进行统一规划,使同类果树的生产园地相对集中,以利产品处理、加工,形成商品。要根据各种果树对环境条件的特定要求,选择适当的树种。主栽品种以少而专为原则。力求多栽优质、高产、稳产、畅销的品种,同时配置开花、花粉发达的授粉树。中等规模以上的果园,果树面积占80%左右,防护林、道路、房屋、选果场等约占20%。果树应分区栽植以便管理。栽植前园地要深翻改土、修筑道路和排灌系统、营造防护林等;苗木要挑选,按根系质量、干颈粗细分类,使同一小区苗木均一。
3.在现有技术中的果园大多数通过人工对果园进行种植,若果园较大,则人工成本投入较高,较难管理,效率也不高,因此,本发明提出一种基于果园种植的机械化生产方法,用于解决上述问题。
技术实现要素:
4.基于背景技术存在果园大多数通过人工对果园进行种植,若果园较大,则人工成本投入较高,较难管理,效率也不高的技术问题,本发明提出了一种基于果园种植的机械化生产方法。
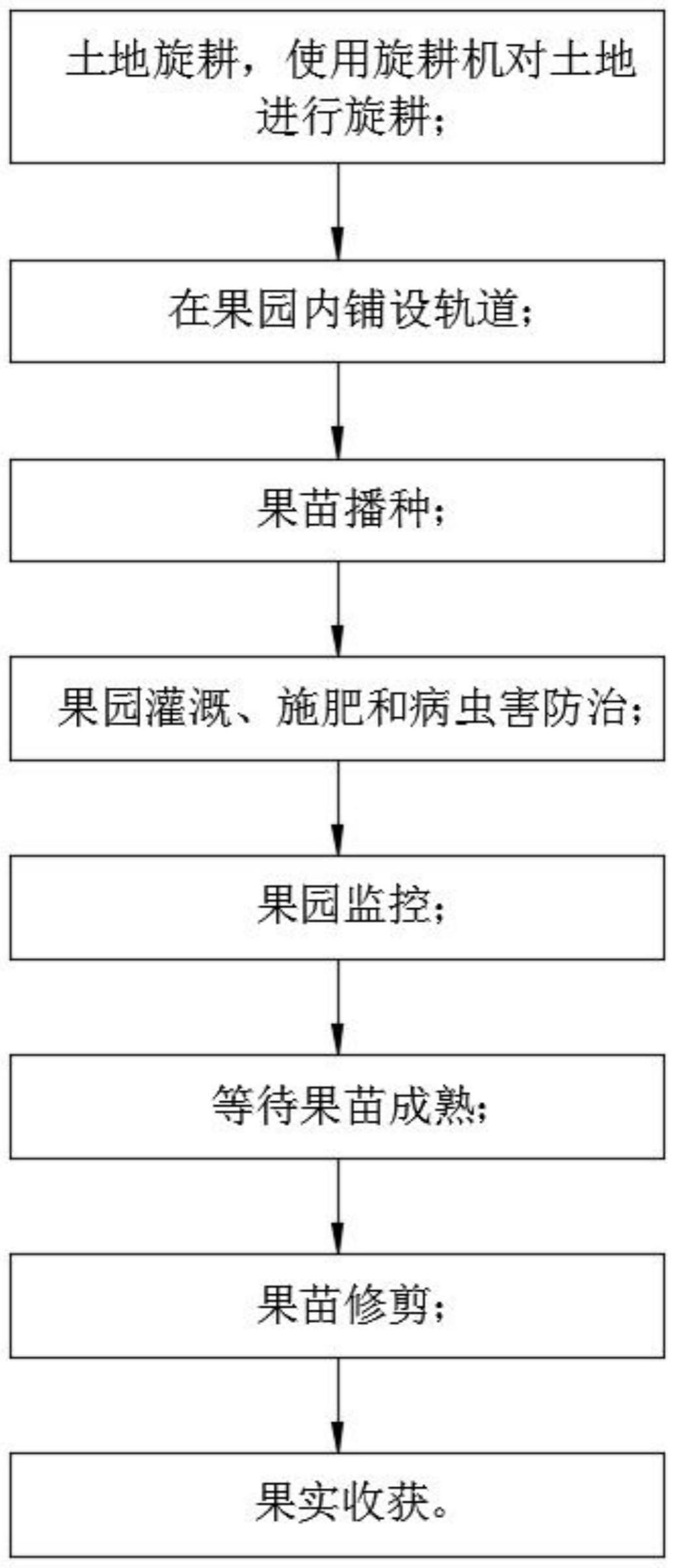
5.本发明提出的一种基于果园种植的机械化生产方法,包括以下步骤:
6.s1:土地旋耕,使用旋耕机对土地进行旋耕;
7.s2:在果园内铺设电动线性导轨;
8.s3:果苗播种;
9.s4:果园灌溉、施肥和病虫害防治;
10.s5:果园监控;
11.s6:等待果苗成熟;
12.s7:果苗修剪;
13.s8:果实收获。
14.优选地,所述s2步骤中,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树2-5米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1-1.5米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动。
15.优选地,所述s3步骤中,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内。
16.优选地,所述s4步骤中,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药。
17.优选地,所述s4步骤中,再在果园内,间隔10-15米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用。
18.优选地,所述s5步骤中,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每棵果苗进行覆盖。
19.优选地,所述s7步骤中,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除,整株几何修剪机是在电动线性导轨上安装可以上下升降、左右转动的外伸作业臂,臂端装有液压驱动的切割器,根据切割器的类型不同,又分为往复割刀式修剪机、旋转刀盘式修剪机和切割器由两排圆盘锯组成的圆盘锯式修剪机,单枝修剪机具,液压伺服修枝剪,适于修剪葡萄树藤和娇嫩的果树。
20.优选地,所述s8步骤中,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
21.本发明的有益效果:
22.本发明通过在果园内铺设电动线性导轨,将各种机器安装在电动线性导轨上,机器可在电动线性导轨上行走,电动线性导轨会经过各个树苗或者果树,然后就可自动的在园区内对树苗进行栽种、养护和对果实进行收集,人工成本降低,容易管理,效率较高。
附图说明
23.图1为本发明提出的工作流程图。
具体实施方式
24.下面结合具体实施例对本发明作进一步解说。
25.参照图1,实施例一
26.本实施例中提出了一种基于果园种植的机械化生产方法,包括以下步骤:
27.s1:土地旋耕,使用旋耕机对土地进行旋耕;
28.s2:在果园内铺设电动线性导轨,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树2米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动;
29.s3:果苗播种,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内;
30.s4:果园灌溉、施肥和病虫害防治,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药,再在果园内,间隔10米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用;
31.s5:果园监控,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每棵果苗进行覆盖;
32.s6:等待果苗成熟;
33.s7:果苗修剪,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除,整株几何修剪机是在电动线性导轨上安装可以上下升降、左右转动的外伸作业臂,臂端装有液压驱动的切割器,根据切割器的类型不同,又分为往复割刀式修剪机、旋转刀盘式修剪机和切割器由两排圆盘锯组成的圆盘锯式修剪机,单枝修剪机具,液压伺服修枝剪,适于修剪葡萄树藤和娇嫩的果树;
34.s8:果实收获,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
35.参照图1,实施例二
36.本实施例中提出了一种基于果园种植的机械化生产方法,包括以下步骤:
37.s1:土地旋耕,使用旋耕机对土地进行旋耕;
38.s2:在果园内铺设电动线性导轨,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树3米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1.2米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动;
39.s3:果苗播种,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内;
40.s4:果园灌溉、施肥和病虫害防治,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药,再在果园内,间隔12米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用;
41.s5:果园监控,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每
棵果苗进行覆盖;
42.s6:等待果苗成熟;
43.s7:果苗修剪,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除,整株几何修剪机是在电动线性导轨上安装可以上下升降、左右转动的外伸作业臂,臂端装有液压驱动的切割器,根据切割器的类型不同,又分为往复割刀式修剪机、旋转刀盘式修剪机和切割器由两排圆盘锯组成的圆盘锯式修剪机,单枝修剪机具,液压伺服修枝剪,适于修剪葡萄树藤和娇嫩的果树;
44.s8:果实收获,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
45.参照图1,实施例三
46.本实施例中提出了一种基于果园种植的机械化生产方法,包括以下步骤:
47.s1:土地旋耕,使用旋耕机对土地进行旋耕;
48.s2:在果园内铺设电动线性导轨,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树4米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1.2米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动;
49.s3:果苗播种,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内;
50.s4:果园灌溉、施肥和病虫害防治,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药,再在果园内,间隔11米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用;
51.s5:果园监控,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每棵果苗进行覆盖;
52.s6:等待果苗成熟;
53.s7:果苗修剪,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除,整株几何修剪机是在电动线性导轨上安装可以上下升降、左右转动的外伸作业臂,臂端装有液压驱动的切割器,根据切割器的类型不同,又分为往复割刀式修剪机、旋转刀盘式修剪机和切割器由两排圆盘锯组成的圆盘锯式修剪机,单枝修剪机具,液压伺服修枝剪,适于修剪葡萄树藤和娇嫩的果树;
54.s8:果实收获,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
55.参照图1,实施例四
56.本实施例中提出了一种基于果园种植的机械化生产方法,包括以下步骤:
57.s1:土地旋耕,使用旋耕机对土地进行旋耕;
58.s2:在果园内铺设电动线性导轨,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树5米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1.4米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动;
59.s3:果苗播种,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内;
60.s4:果园灌溉、施肥和病虫害防治,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药,再在果园内,间隔14米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用;
61.s5:果园监控,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每棵果苗进行覆盖;
62.s6:等待果苗成熟;
63.s7:果苗修剪,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除,整株几何修剪机是在电动线性导轨上安装可以上下升降、左右转动的外伸作业臂,臂端装有液压驱动的切割器,根据切割器的类型不同,又分为往复割刀式修剪机、旋转刀盘式修剪机和切割器由两排圆盘锯组成的圆盘锯式修剪机,单枝修剪机具,液压伺服修枝剪,适于修剪葡萄树藤和娇嫩的果树;
64.s8:果实收获,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
65.参照图1,实施例五
66.本实施例中提出了一种基于果园种植的机械化生产方法,包括以下步骤:
67.s1:土地旋耕,使用旋耕机对土地进行旋耕;
68.s2:在果园内铺设电动线性导轨,在每棵果树的外侧铺设矩形电动线性导轨,每棵果树的矩形电动线性导轨再通过电动线性导轨进行连接,若为果树,电动线性导轨需距离果树5米,若为果苗则需要电动线性导轨安装在渠道内,距离树苗1.5米,导轨,金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置,导轨表面上的纵向槽或脊,用于导引、固定机器部件、专用设备、仪器等,导轨又称滑轨、线性导轨、线性滑轨,用于直线往复运动场合,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动;
69.s3:果苗播种,在电动线性导轨上安装自动起苗机、自动播种机和自动钻孔机,对
矩形电动线性导轨内的区域使用自动钻孔机进行钻孔,再通过自动插苗机将果苗或者果树插入到事先挖好的坑道内;
70.s4:果园灌溉、施肥和病虫害防治,在果园内安装三组喷淋管道,管道需要经过每个,一组用于喷淋清水,一组用于喷淋水肥,来给果苗进行灌溉和对土地果苗进行施肥,以及对果苗喷洒农药,再在果园内,间隔15米安装悬挂粘虫板和杀虫灯,杀虫灯是根据昆虫具有趋光性的特点,利用昆虫敏感的特定光谱范围的诱虫光源,诱集昆虫并能有效杀灭昆虫,降低病虫指数,防治虫害和虫媒病害的专用装置,主要用于害虫的杀灭,减少杀虫剂的使用;
71.s5:果园监控,在果园内呈矩阵安装监控,监控与监控之间间隔5-10米,需要对每棵果苗进行覆盖;
72.s6:等待果苗成熟;
73.s7:果苗修剪,在电动线性导轨上安装整株几何修剪机和除草机,距离4-6周对果树进行修剪,对杂草进行去除;
74.s8:果实收获,再在电动线性导轨上安装电动线性导轨车,电动线性导轨车上放置塑料筐和安装果实采摘机,果实采摘机将果实取下,再将果实采摘到塑料框内。
75.对比常规的果园种植方法与实施例一至五制得的果园种植方法,实施例一至五制得的如下表:
[0076][0077]
由上述表格可知,本发明提出的一种基于果园种植的机械化生产方法具有明显提高,且实施三为最佳实施例。
[0078]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!